

1. 16 февраля 2008г. исполнилось тридцать пять лет со дня издания Постановления ЦК КПСС и Совета Министров СССР от 16.02.1973г. № 130-49 «О мерах по повышению безопасности полетов гражданской авиации» в соответствии с которым, наряду с другими мероприятиями, Министерству обороны СССР предписывалось создать в стране Единую систему управления воздушным движением гражданской авиации, отвечающей требованиям мирного и военного времени. Указанная дата считается началом создания в стране Единой системы (ЕС) организации воздушного движения (ОрВД). была построена Система с иерархической трехуровневой структурой, включающая в себя Главный центр (ГЦ) ЕС управления воздушного движения (УВД), шесть зональных центров (Москва, Ленинград, Минск, Киев, Ростов-на-Дону, Куйбышев) и 22 районных центра (РЦ) Единая системы УВД на всей территории страны практически стала функционировать с начала 1983 года и включала в свой состав один Главный, двадцать зональных (с учетом вспомогательных) и 189 районных (с учетом вспомогательных) центров. Следующим шагом в интересах построения рациональной структуры государственного управления гражданской авиации (ГА) и воздушным движением (ВД) явилось издание Указа Президента РФ от 15 марта 1996г. №382 «О совершенствовании системы государственного управления транспортным комплексом РФ» и принятие Постановления Правительства РФ от 14 мая 1996г. №583 «Вопросы федеральной авиационной службы России». На основании этого Постановления в целях повышения безопасности и регулярности полетов, а также в интересах формирования единой хозяйственной системы УВД в 1996 году было создано Федеральное государственное унитарное предприятие по организации воздушного движения - ФГУП «Государственная корпорации по ОрВД». Она осуществляет свою деятельность на всей территории РФ, а также за ее пределами в соответствии с международными договорами. Включает в себя единые системы ОрВД и авиационно-космического поиска и спасения, службу аэронавигационной информации, систему метеорологического обслуживания аэронавигации с их персоналом и наземными, бортовыми, спутниковыми средствами связи, навигации, посадки, наблюдения, поиска и спасения, информации и обслуживания.
2. В настоящее время Аэронавигационная система России, включающая в себя ЕС ОрВД РФ, является крупнейшей в мире современной высокотехнологической отраслью, стратегической основой обеспечения безопасного и эффективного ИВП стракы в интересах решения экономических и оборонных задач. Оперативные органы управления ЕС ОрВД состоят из 97 центров, обслуживаемое воздушное пространство простирается на 26 миллионов километров, протяженность воздушных маршрутов - более 550 тысяч километров, в том числе международных - 356 тысяч километров. Обслуживается более 1 миллиона полетов в год, одновременно под управлением находятся свыше 800 ВС. На предприятиях сосредоточено около 2 тысяч единиц средств навигации, более 400 единиц средств радиолокации, свыше 9 тысяч средств ВЧ и ОВЧ радиосвязи.
К 2008г. введены в действие такие Федеральные авиационные правила (ФАП), как «Радиотехническое обеспечение полетов ВС и авиационная электросвязь», «Сертификация объектов ЕС ОрВД», «Сертификация юридических лиц, осуществляющих производство систем и средств радиотехнического обеспечения полетов и УВД».
Принимая во внимание высокую интенсивность и напряженность полетов ВС в зоне ответственности филиала «Московский центр автоматизированного УВД» ФГУП «Госкорпорация по ОрВД», а также его важнейшую роль в обеспечении безопасности полетов, Правительством РФ принято решение о строительстве в 2008 - 2011 годах нового центра управления полетами МЦ АУВД.
Распоряжением Правительства РФ от 29 декабря 2007г. № 1974-р утверждена Концепция федеральной целевой программы «Модернизация ЕС ОрВД РФ (2009 - 2015 годы)», являющаяся важнейшим инструментом для дальнейшего совершенствования Единой системы и развития в целом Аэронавигационной системы России, что позволит практически укрепить систему организации ИВП РФ и аэронавигационного обслуживания, в том числе в зонах ее международной ответственности, в интересах эффективного использования этого пространства всеми пользователями, обеспечения национальной безопасности и развития экономики государства.
Важнейшим элементом модернизации ЕС ОрВД РФ является создание и внедрение современных автоматизированных систем (АС) УВД и автоматизированных систем ОрВД.
3. Диспетчерское обслуживание, называемое также управлением воздушным движением (УВД), является основным процессом организации ВД в РФ. Его задача - предотвращение столкновений ВС между собой в воздухе, и на земле, с наземными препятствиями, включая транспортные средства аэродрома. диспетчеры УВД. Они следят за потоком ВС, которые должны соблюдать план полета, выдерживать нормы эшелонирования. Диспетчеры УВД должны обеспечивать такое движение ВС, чтобы исключить опасные сближения ВС в воздухе, т.е. предотвращать их сближение на расстояние менее установленного по требованиям безопасность полетов. То же относится к предотвращению опасного сближения ВС с наземными препятствиями, включая автотранспорт аэродромов. Основными методами обеспечения безопасности полетов являются: разработка и внедрение рациональной структуры ВП и порядка его использования; соблюдение правил обеспечения безопасности полетов, включающих в себя правила полетов, правила эшелонирования и выдерживания безопасных высот полета, а также соблюдение минимумов для взлета и посадки; соблюдение правил УВД. Диспетчер, как правило, выполняет следующие функции:
наблюдение - получение информации о ВО и первичное оценивание данных измерений;
анализ данных - оценка их достоверности, идентификация, классификация и оценка параметров движения каждого ВС;
обобщение - формирование общей картины ВО;
оценивание - распознавание опасных ситуаций: отклонений от плановой траектории, потенциально конфликтных ситуаций, опасных, сближений и т.д.;
выработка решений - рассмотрение возможностей разрешения стандартных и нестандартных ситуаций;
передача команд на ВС, контроль правильности их получения и исполнения.
Отметим некоторые особенности этого процесса:
функции и входящие в них операции всегда выполняются последовательно во времени;
в свою очередь, общая последовательность действий носит циклический характер, т.е. перечисленные выше действия периодически повторяются;
все технологические операции выполняются в реальном масштабе времени (это очень важный момент). 4 с ростом интенсивности и плотности ВД загрузка диспетчера УВД возрастает настолько, что существенно повышается вероятность принятия им ошибочного решения или пропуска опасных ситуаций.
4. АС УВД могут вырабатывать соответствующие решения для конкретной ВО в типовых (стандартных) ситуациях, но они не в состоянии принимать решения в нестандартных ситуациях, предусмотреть разнообразие которых заранее невозможно. По этой причине не рассматривается и не ставится вопрос о создании полностью автоматических систем УВД. Речь может идти только о создании автоматизированных систем, в которых участие человека является необходимым и обязательным.
Поэтому системы УВД строятся как автоматизированные, где вычислительным средствам передается лишь определенная часть функций и операций обработки информации по жестким алгоритмам, в то время как за человеком оператором остаются те задачи, которые требуют творческого подхода и принятия нестандартных решений в сложных ситуациях. Очевидно, что по мере совершенствования АС УВД перечень функций и операций, которые полностью автоматизированы, будет расширяться и, следовательно, будет расширяться общий уровень автоматизации АС УВД.
5. Автоматизация функций УВД является главным фактором повышения безопасности полетов, увеличения пропускной способности и эффективности систем УВД на всех фазах полета ВС. При этом улучшаются условия работы для диспетчерского и инженерного персонала, повышается производительность их труда. Кроме того, важнейшей задачей автоматизации процессов УВД является снижение риска диспетчерских ошибок. Автоматизация обеспечивает обработку, хранение и обмен все большими объемами информации, с постоянно возрастающей скоростью функционирования при повышении уровня достоверности и точности получаемой информации.
6.см еще 7,8,9,10,11 Перечислим основные характеристики АС УВД, которые непосредственно влияют на уровень безопасности полетов. К ним относятся:
Готовность;
Целостность;
Непрерывность;
Эргономичность;
Надежность;
Открытость,
Эксплуатационные требования(типовые требования, которые предъявляются к любой системе в процессе ее технической эксплуатации (контролепригодность, ремонтопригодность, сохраняемость и т.д)
Дадим определения этих характеристик, используя соответствующие нормативные документы.
8.Готовность - это свойство системы выполнять заданные функции по соответствующей инициации (т.е. по требованиям). Количественной мерой готовности системы является отношение фактического времени (длительности) функционирования системы от подачи сигнала инициации (поступления требования) до завершения предписанных операций к запланированному времени (интервалу) функционирования системы для выполнения указанных операций. С понятием готовности связано такое понятие, как полнодоступ-ность, заключающаяся в отсутствии задержки инициации системы или в отсутствии интервала времени, обусловленного, например, «занятостью» системы.
9. Целостность заключается в свойстве системы обнаруживать и исправлять собственные ошибки двух видов:
Ошибочное действие (сообщение) расценивается как правильное («Пропуск ошибки» или «ложная тревога», т.е., с точки зрения математической статистики, это равносильно появлению ошибки первого рода);
Правильное действие (сообщение) классифицируется как ошибочное («пропуск сигнала», т.е., с точки зрения математической статистики, это равносильно появлению ошибки второго рода).
В качестве количественной меры целостности принимают соответствующие вероятности появления ошибок или их комбинации. С содержательной точки зрения целостность отражает степень доверия к действиям системы и к получаемым результатам.
9. Непрерывность является свойством системы выполнять в реальном масштабе времени свои функции без незапланированных прерываний в течение заранее запланированного периода работы. За количественную меру непрерывности принимают вероятность отсутствия прерываний за заданное время работы. Численно ее можно оценивать как отношение суммарного времени прерываний к общему (заданному) времени функционирования.
10. Свойство системы, состоящее в доступности и удобстве работы с ней человека-оператора, включая управление, контроль и предоставление необходимой информации, называется эргономичностью.
Надежность - это свойство системы выполнять все свои функции, адекватно реагируя как на заранее определенные воздействия, так и на их отсутствие. Нарушение этого свойства расценивается как отказ, т.е. невыполнение системой своих функциональных предназначений. Степень надежности оценивается либо вероятностью отказа, либо временем наработки до отказа.
| 11.Под открытостью понимают свойство информационной системы, состоящее в наличии возможности замены программных и аппаратных средств или внесения в них ограниченных изменений. Степень открытости определяется пределами этих ограничений и обусловлена соответствующими конструктивными и технологическими мерами.
12. существует предварительное, суточное и текущее планирование полетов. Автоматизация функций планирования осуществляется на основе рекомендаций ИКАО, изложенных в Европейском аэронавигационном плане.
Для этих целей решаются следующие задачи:
планирование и координирование ИВП РФ и сопредельных государств;
устранение перегрузок зон и секторов УВД путем рационального планировании и упорядочения потоков ВС;
выбор наиболее экономичных маршрутов и профилей полетов с учетом интересов всех пользователей ВП;
осуществление процессов планирования ВД и расчета аэронавигационных сборов с использованием современных средств связи;
обмен планами полетов и аэронавигационной информацией между элементами системы планирования ВД РФ, сопредельных государств и органами планирования Европейского региона ИКАО;
создание в перспективе единой центральной системы сбора данных об аэронавигационном обслуживании, расчета и учета аэронавигационных сборов.
Необходимость решения указанных выше задач определяет построение информационной структуры системы планирования, которая описывается ниже.
13. Система обработки плановой информации представляет подсистему в общем комплексе АС УВД и называется «Комплекс средств автоматизации планирования воздушного движения (КСА ПВД)». Рассмотрим современный КСА ПВД «Шанета», нашедший широкое применение в ГА РФ.Комплекс «Планета» выполняет функции по сбору и преобразованию данных о плановой информации, осуществляет обработку сообщений сети АФТН и распределение планов полетов. Обработка планов полета включает представление каждого полученного сообщения в стандартном формате, выдачу диспетчеру сообщения о выявленных ошибках, идентификацию каждого сообщения в соответствии с классификацией, принятой в ГА, последующий автоматический или ручной ввод в базу данных, корректировку планов полетов по информации, полученной от нескольких источников.
В зависимости от конфигурации зон УВД и требований заказчика комплекс «Планета» может включать от одного до двух серверов планирования и неограниченное количество рабочих станций, на которых могут выполняться задачи планирования, штурманского обеспечения, задачи планово-диспетчерской службы перевозок и экономики.
Количество рабочих станций ограничено лишь числом мест подключения в концентраторе локальной вычислительной сети (ЛВС). На рис. 1 показана минимальная конфигурация КСА ПВД «Планета» для аэропорта с РЦ и АДП. В этой конфигурации сервер может использоваться как рабочее место, в качестве которого может также использоваться автоматизированное рабочее место (АРМ) АФТН. Основным источником информации для КСА служит сеть АФТН. Преобразование информации, получаемой по каналу АФТН, осуществляет карта сопряжения с АФТН. Для подключения к Центру коммутации сообщений (ЦКС) используется трех- или четырехпроводная линия, включающая прием, передачу и «землю» (в случае четырехпроводной линии «земля» идет отдельно для приема и для передачи). Карта АФТН обеспечивает скорость обмена данными с ЦКС от 50 до 2400 бод в коде МТК2.
14. Программная оболочка обеспечивает работу приложений, выполняющих различные функции в комплексе. Приложения разделяются на обязательные (работающие постоянно, т.е. пользователь не имеет возможности их закрыть) и приложения пользователя (эти программы пользователь может запустить, а также может выйти из них).Основу системы составляют электронные таблицы (базы данных). Таблицы данных и связи между ними показаны на рис. 3

К основным данным относятся таблицы аэропортов, авиакомпаний, типов ВС, точек и участков воздушных трасс. Это данные используются программами комплекса при обработке поступающей плановой информации и при передаче информации потребителю.
К оперативным данным относятся центральное расписание, телеграммы и текущие планы полетов. При этом центральное расписание или повторяющиеся планы полетов заводятся в комплекс автоматически по каналам связи, а телеграммы поступают по каналам АФТН и хранятся в таблице, как принятые, так и переданные. Заявки (предварительные планы полетов) оформляются в виде таблицы, где данные, переданные с рабочих мест комплекса, содержат предварительные планы полетов и изменения к ним, а также вводятся данные от других АДП или служб планирования авиакомпаний. Из меню таблицы отправляются телеграммы, касающиеся суточного планирования.
Текущий план полетов отображается в виде трех таблиц - вылета, прилета и транзита. Из меню имеется возможность отправлять информацию, касающуюся текущего планирования. В текущем плане полетов собирается вся обработанная информация о фактических вылетах и посадках ВС, их задержках, изменениях, текущих планов. Источниками этой информации являются:
ручной ввод;
информация с рабочих мест системы УВД;
другие АДП, ЗЦ, РЦ, информация от которых поступает по каналам АФТН.
Используются также таблицы технической годности, куда заносятся данные о времени открытия и закрытия аэропортов. Эта информация используется в текущих планах.
15. В комплексе «Планета» используется многооконный интерфейс. Он имеет следующие страницы: «Рейс», «вс», «Аэропорты», «Адреса», « Тексты телеграмм» и др.
Текущий и суточный планы ведутся непосредственно диспетчером путем отправки телеграмм и ввода изменений на основе информации, полученной от диспетчеров других АДП, осуществляющих текущее планирование, а также от АС УВД, установленной в данном районе.
В меню текущего плана есть шаблоны телеграмм, которые диспетчер АДП обязан передавать согласно руководящим документам (табель сообщений). Передача телеграммы осуществляется путем выбора рейса и нажатия кнопки с типом телеграммы, необходимой для отправки.
Планы полетов могут быть переданы из таблицы заявок нажатием кнопки с типом предварительного плана полетов или из заранее заготовленного шаблона. Подготовка адресов рассылки телеграмм может осуществляться вручную при помощи шаблонов, либо автоматически. Для автоматического заполнения адресов необходимо указать маршрут полета в виде зон РЦ. План-сводка распечатывается отдельно по вылетам, по посадкам, по транзиту.
Срок хранения архивов устанавливается в соответствии с административными задачами. Архивируются следующие данные:
телеграммы переданные, принятые;
текущий план;
журнал, где регистрируются действия пользователей.
Телеграммы архивируются в текстовом виде в формате баз данных. Текущий план также хранится в формате баз данных.
Для взаимодействия с источниками данных используется программа «Телекс», которая выполняет прием, передачу телеграмм и обмен ими с ЦКС.
«Телекс» сопрягается с телеграфным каналом при помощи телеграфного адаптера и обеспечивает возможность работы по телеграфным каналам и/или по другим физическим каналамя. обепечивающим следующие требуемые характеристики:
контроль состояния каналов связи на нарушение и восстановление работоспособности (например, обрыв);
передачу (0, 20, 40 минут каждого часа) и контроль приема (в период от 56 до 4, от 16 до 24, от 36 до 44 минут) контрольных канальных сообщений;
посылку служебных сообщений при отсутствии на приемных каналах контрольных канальных сообщений;
синтаксический и семантический контроль принимаемых сообщений;
ведение порядковой нумерации принимаемых сообщений, анализа обозначения передачи (строки, заголовка), автоматическое формирование и передачу в канал соответствующих служебных сообщений и запросов при несовпадении ожидаемого и принятого обозначения передачи (обеспечивающих их взаимосогласованную автоматическую подстройку порядковой нумерации приема/передачи и повтор пропущенных сообщений);
автоматическое формирование и передачу в канал подтверждения получения сообщения соответствующей категории срочности;
присвоение каждому исходящему сообщению соответствующего обозначения передачи, порядкового номера и времени передачи, изменение нумерации при смене даты и при превышении номером числа 999 с введением соответствующей серии;
организацию очередности передачи сообщений в канал в соответствии с их категорией срочности;
обеспечение приоритетной передачи сообщений высшей категории срочности;
автоматическую обработку, формирование и передачу служебных сообщений;
архивирование принятых сообщений всех типов;
хранение принятой и переданной информации с организацией текущего (суточного) и долговременного архивов;
автоматическое ведение статистической информации по каналу;
автоматическое формирование и непрерывную передачу в канал, находящийся в тестовом режиме работы, серии тестовых сообщений для его проверки и настройки.
Обработчик телеграмм осуществляет обработку принятых и переданных телеграмм, классифицирует их по типам, ведет текущий и суточный планы, выявляет ошибочные телеграммы, отображает предполагаемую ошибку.
16. см еще 17,18 Основным источником информации о воздушной обстановке в АС УВД выступают радиолокационные комплексы типа 1PJI-139, 1Л-118, РЛК «Скала», РЖ «Утес-Т», ВРЛ «Крона», ВРЛ «Радуга», ДРЛ-7СМ, «Экран-85», «Урал» и др. Рассмотрим процесс обработки и отображения радиолокационной информации (РЛИ), поступающей, например, от обзорного РЛ. Основным вопросом в данном случае является представление поступающей РЛИ в цифровой форме. Сформулируем основные критерии для выбора преобразования РЛИ из аналоговой формы (в которой она поступает от РЛК) в цифровую:
снижение потерь полезной информации при выполнении преобразования;
минимизация затрат необходимого процессного времени;
удобство последующей обработки цифровой информации (например, возможность передачи по каналам связи, запись информации и т.д.).
Для этих целей можно использовать два варианта представления РЛИ в цифровой форме:
серверный (групповой);
распределенный.
достаточно сложно сделать однозначный выбор в пользу серверной или распределенной обработки. Вариант подключения необходимо выбирать, ориентируясь на конфигурацию данной конкретной системы и используя компромиссные решения
17. Распределенный способ предполагает заведение аналогового сигнала на каждый радиолокатор, занимающийся обработкой обзорной РЛИ. Распределенная обработка в этом случае позволяет с помощью пользовательского интерфейса управлять режимами цифрового преобразования (например, изменяя разрешающую способность преобразования при выборе масштаба на данном рабочем месте). Кроме того, распределение обработки позволяет организовать резервирование серверов на случай их отказа, что повышает «живучесть» системы. Однако в этом случае возникает ряд проблем, к которым можно отнести следующие:
необходимость установки специальной аппаратуры сопряжения на каждый компьютер;
«удлинение» аналогового канала (т.е. необходимо отдельно подводить аналоговый сигнал к каждому компьютеру);
увеличение нагрузки (имеется в виду входное сопротивление аппаратуры сопряжения), т.е. уменьшается уровень сигнала, что требует введения соответствующих кабельных усилителей и возможно появление дополнительных искажений сигнала из-за возникновения наводок;
ограничения по дальности передачи аналогового сигнала приводят к ограничению максимального расстояния от радиолокационной позиции (РЛП) до рабочих мест, а для собственно трансляции аналогового сигнала требуется применение специализированного оборудования;
необходимость вариации настроек аппаратуры сопряжения приводит к различному виду получаемого на выходе сигнала;
вследствие подключения аналогового сигнала по схеме «шина» обрыв кабеля приводит к прекращению трансляции РЛИ на всех комплектах устройств отображения, располагающихся после места обрыва, и к ухудшению качества РЛИ на остальных комплектах в результате возникновения рассогласованности линии;
при изменении уровня входного сигнала требуется подстройка аппаратуры сопряжения на каждом из комплектов
18. Серверная (групповая) обработка аналогового сигнала РЛИ предполагает ввод сигнала в систему через сервер и дальнейшую передачу цифрового сигнала по каналам связи до конечного потребителя. При этом цифровой сигнал передается без искажений на любые расстояния по стандартным цифровым каналам, а удобство настройки и регулировки устройств сопряжения влияет одновременно на отображаемую информацию для всех конечных пользователей. Однако при этом возникает необходимость проведения цифрового преобразования с максимальной разрешающей способностью, так как масштабирование изображения конечным пользователем не должно влиять на качество отображаемой информации. Кроме того, в этой системе отказ, сбой, неправильные настройки серверного оборудования в равной степени влияют на всех конечных пользователей.
19. Для АС УВД характерно использование данных наблюдения от различных источников информации (секторов). Это позволяет снизить погрешность отдельных замеров и повысить устойчивость и достоверность наблюдений. Такой метод наблюдения получил название мультисенсорного. В этой проблеме можно выделить ряд задач, которые требуют разработки соответствующих методов и алгоритмов их решения:
оценивание параметров состояния (координат и параметров движения);
сравнительная оценка достоверности информации, получаемой от различных сенсоров;
построение интегрированных траекторий и обеспечение их непрерывности.
Кроме решения этих основных задач, требуется выполнить целый ряд дополнительных процедур, вытекающих из разнородности сенсоров (как функциональной, так и топологической), к которым относятся:
пересчет измерений в единую систему координат;
приведение измерений к единому времени.
Для этой цели используются соответствующие алгоритмы, основанные на применении корреляционных методов..
Полагаем, что в качестве сенсоров применяются различные РЛС, поэтому далее будем использовать термин «мультирадарная обработки информации». Результатом мультирадарной обработки информации являются мультирадар-ные траектории движения ВС, рассчитанные из реальных траекторий по специальным алгоритмам. В зависимости от обстоятельств при формировании мультирадарной траектории может использоваться траектория, формируемая по данным от одной РЛС или сразу от нескольких РЛС, измерения которых усредняются с различными весовыми коэффициентами. Основным методом мультирадарной обработки является введение некоторого фиктивного наблюдателя, который можно назвать виртуальным радаром. (20)
20.Основным методом мультирадарной обработки является введение некоторого фиктивного наблюдателя, который можно назвать виртуальным радаром. Этот метод может быть применен как в случае однородных измерителей (например, обзорных РЛС), так и в случае наличия разнородных источников информации (это имеет место при совместном использовании радиолокационного наблюдения и радиопеленгаторов).
Полагаем, что необходимые преобразования измерений, связанные с переходом к единому времени и к единой системе координат, выполнены для всех датчиков-измерителей (сенсоров).
Суть метода состоит в том, что сочетается независимая обработка информации от каждого отдельного источника и совместная обработка результатов, которая интерпретируется как появление дополнительного наблюдения, а именно виртуального радара. Потенциальный выигрыш, получаемый с помощью виртуального радара, объясняется следующими обстоятельствами:
большим объемом обрабатываемой информации;
возможным устранением (или ослаблением влияния) случайных как постоянных, так и переменных систематических погрешностей измерений.
Траектории от каждой РЛС вначале обрабатываются и сглаживаются независимо. При этом полагаем, что от каждой реальной РЛС на вход мульти-радарного устройства подается некоторое число простых траекторий. Каждая простая траектория содержит информацию о сглаженных координатах и скорости в какой-то момент времени, что позволяет рассчитывать координаты цели в любой последующий момент времени. Любая из траекторий имеет свое качество, которое характеризуется точностью и достоверностью оценок координат. Тогда алгоритм мультирадарной обработки предполагает хранение мультирадарных траекторий. Каждая мультирадарная траектории содержит в себе список номеров простых траекторий от радарных РЛС, в соответствии с которым она формируется, и собственные рассчитанные параметры движения цели. В результате мультирадарной обработки создается виртуальный радар, информация от которого выдается потребителям с определенной периодичностью. : "Т-Т Алгоритм мультирадарной обработки показан на рис (вопрос21)
21.
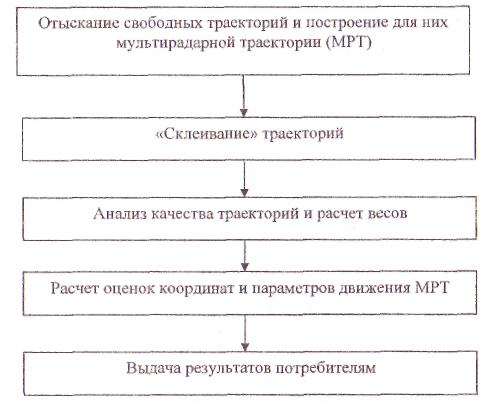 1Берутся
простые траектории (от реальных РЛС),
которые не привязаны ни к какой МРТ.
Их называют свободными и для каждой из
них заводят МРТ.
1Берутся
простые траектории (от реальных РЛС),
которые не привязаны ни к какой МРТ.
Их называют свободными и для каждой из
них заводят МРТ.
2Перебирают МРТ, время жизни которых не превысило заданное число (10-15) отсчетов. Находят среди них близкие (расхождение в курсе, местоположелии и высоте для которых не превышает заданные ограничения). Если такие траектории находятся, то их «склеивают» в одну.
3Для каждой МРТ статистически рассчитывают веса входящих в нее траекторий. За основу расчета берут статические (ранее назначенные) веса, которые задаются в качестве параметров мультирадарной обработки с учетом априорной информации о РЛС (анализ записей сигналов за предыдущий период). Статический вес траектории должен зависеть от погрешности данной РЛС, количества ложных меток, вероятности пропуска отметки, наличия лепестков и переотражений. Итоговый статистический вес РЛС определяется из его статического веса с использованием информации о качестве траектории в предыдущие интервалы времени. При наличии пропусков отметок вес траектории снижается, так как очевидно, что в этом случае погрешность оценок параметров движения возрастает.
4Рассчитывают координаты, скорость и курс цели для МРТ как линейную комбинацию параметров входящих в нее реальных траекторий с соответствующими весами.
5Выдают рассчитанные параметры целей потребителям в качестве отсчетов виртуального радара для построения траекторий, прогноза и т.д.
22. В состав АС УВД «Атьфа» входит подсистема обработки и отображения информации - КСА УВД «Альфа», т.е. система наблюдении за воздушной обстановкой. Ранее мы описали работу подсистемы КСА ПВД «Планета», входящей в состав АС УВД «Альфа», так же как и КСА УВД «Альфа». Но основу КСА УВД «Альфа» составляют системы и устройства, связанные с обработкой и отображением радиолокационной информации. Все эти вопросы в достаточном объеме отражены в соответствующих учебных дисциплинах специальности 160905 «Техническая эксплуатация транспортного радиооборудования», например, в учебной дисциплине «Радиолокационные системы». Поэтому при описании особенностей построения КСА УВД «Альфа»
остановимся только на описании тех процессов, которые характерны и специфичны именно для АС УВД. Такое рассмотрение начнем с особенностей автоматизации принятия решений в АС УВД на основе имеющейся информации от средств наблюдения.
Необходимое условие автоматизации решения задач УВД состоит в соблюдении существующей технологии действий диспетчера. Она, в свою очередь, сводится к описанию алгоритмов действий диспетчера в той или иной сложившейся ситуации. Соответственно степень автоматизации АС УВД будет зависеть от количества описанных в системе условий. Реакция системы на сложившиеся условия может быть трех видов:
сигнализация наступления событий, которая может сопровождаться выдачей соответствующих расчетов и параметров;
выдача рекомендаций по действиям диспетчера в сложившейся ситуации;
автоматическое действие системы, направленное на разрешение сложившейся ситуации"