

4.3.2. Расчет смещения оси при постоянных точках контакта.
Для рассматриваемого случая след точек контакта на центре в виде кольца. На рис.4.20 представлен конус центра станка с углом при вершине 60º, образующие конуса прямолинейны. Сечение конуса плоскостью, перпендикулярной ее оси, - окружность. Плоскость АЕ – след точек контакта, оставленные при вращении детали на центрах. Она расположена под углом ∆α к оси конуса. Угол ∆α обусловлен перекосом центров и центровых отверстий. Обозначим через d диаметр центрового отверстия, которое контактирует с центром. В плоскости сечения АЕ образует эллипс (как сечение конуса плоскостью, наклонной к оси) с центром по оси в точке С1. Через эту точку проходит ось центрового отверстия. При вращении детали на центрах, оси которых не совпадают, ось детали будет смещаться в пространстве. За величину смещения для рассматриваемого случая можно принять разность полуосей эллипса.
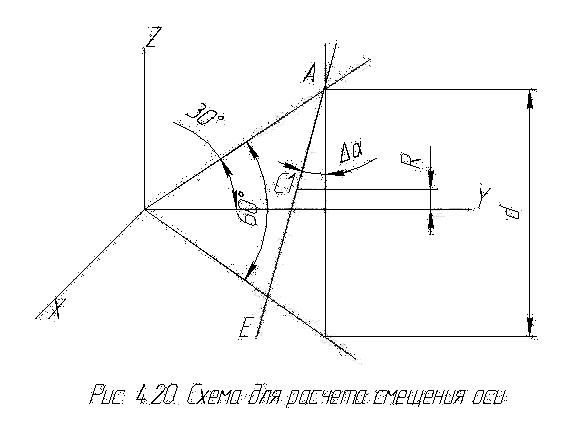
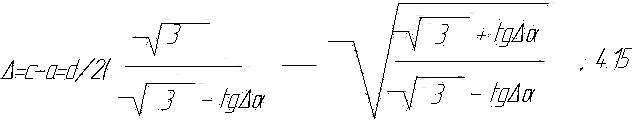
Для определения величины полуоси определим координаты точки С1, составим уравнение плоскости АЕ и уравнение эллипса – сечение конуса плоскостью. Решив систему уравнений, определим координаты точки С1 и величины полуосей эллипса С и А. Тогда величина смещения оси, равна разности полуосей, будет определятся по формуле:
 Для
значений d=4мм при изменении
угла ∆α от 0 до 1º смещение составит 3,5
мкм.
Для
значений d=4мм при изменении
угла ∆α от 0 до 1º смещение составит 3,5
мкм.
4.3.3. Определение смещения оси при переменных точках контакта.
При контактировании по переменным точкам смещение оси детали происходит в плоскости перекоса центров, характер перемещения – линия, а учитывая ее малость – прямая. Максимальная величина смещения обнаруживается при повороте детали на центрах на 2π.
На рис. 4.21. показан центр со следами на нем точек контакта от двух диаметров центрового отверстия. Для малого диаметра d – следы АА’, для большого Д-ВВ’.

О смещении оси детали можно судить по величине смещения середин отрезков АВ и A’B’. Это смещение можно выразить зависимостью
![]()
Где: с – длина конусной поверхности центрового отверстия;
α – угол наклона линии АВ к оси Y:
![]()
∆γ – изменение угла α при повороте детали на 2π.
При изменении ∆γ от 0 до 1º и Д=13мм, С=8мм максимальное смещение оси детали составит 50 мкм.
Сравнивая величины смещений оси для различных законов контактирования, можно сказать, что при контактировании по переменным точкам смещение оси детали на порядок выше. То есть, если угол перекоса центров станка незначителен, смещение оси детали мало, несмотря на значительный перекос центровых отверстий детали.
V. Зажимные механизмы измерительных устройств и их классификация.
Зажимными называют механизмы, устраняющие возможность вибрации или смещения детали относительно установочных элементов возникающих в процессе контроля (измерения). Зажимные механизмы делят на простые и комбинированные. К простым относятся: винтовые, клиновые, эксцентриковые, рычажные, пружинные. По числу точек силы зажима механизмы делят на единичные и многократные, по степени механизации – ручные, механизированные, автоматизированные.
Требования к зажимным механизмам
1. При зажиме не должно нарушаться положение заготовки, достигнутое базированием.
2. Зажим не должен вызывать деформации заготовок или порчи поверхности.
3. Сила зажима должна быть минимально необходимой, но достаточной.
4. Зажим и открепление производится с минимальной затратой сил.
5. Силы резания не должны воспринимать зажимные устройства.
6. Зажимной механизм должен быть простым по конструкции, удобным в эксплуатации.
Выполнение большинства этих требований связанно с правильным определением величины, направления и места приложения сил зажима.