


СОДЕРЖАНИЕ
Введение 4
1 Понятие о рациональном электроприводе и условиях его выбора 5
2 Расчет и анализ приводных характеристик навозоуборочного 6
транспортера
2.1 Технологическая характеристика 6
2.2 Кинематическая характеристика 7
2.3 Механическая характеристика 11
2.4 Инерционная характеристика 17
2.5 Нагрузочная характеристика 18
2.6 Энергетическая характеристика 21
2.7 Заключение по приводным характеристикам 23
3 Выбор электродвигателя 24
3.1 Выбор электродвигателя для горизонтального транспортера 24
3.2 Выбор электродвигателя для наклонного транспортера 29
4 Обоснование и описание принципиальной схемы управления электроприводом навозоуборочного транспортера 34
4.1 Принципиальная схема управления 34
4.2 Выбор аппаратуры управления и защиты 36
Список литературы 41
ВВЕДЕНИЕ
АПК – важная отрасль народного хозяйства. Задача его состоит в надежном обеспечении страны продовольствием и сельскохозяйственным сырьем.
Преобладающее количество рабочих машин, применяемых в сельском хозяйстве, имеют электрический привод различного типа, конструкции и режима работы с простейшими и полностью автоматизированными схемами управления. Электропривод является основным потребителем электрической энергии, поэтому от правильности его выбора зависят экономичность и надежность работы сельскохозяйственной машины.
Основной задачей данной курсовой работы является закрепление знаний по теоретической части курса “Электропривод в сельском хозяйстве”, а также освоение методов расчёта электроприводов различных cельскохозяйственных машин и установок.
Основная цель курсовой работы – научиться практическому применению знаний при проектировании и расчёте автоматизированного электропривода. [1]
1 Понятие о рациональном электроприводе и условиях его выбора
В сельском хозяйстве используется большое количество рабочих машин с электроприводом. В связи с этим для каждой машины необходимо создать рациональный электропривод, который обеспечивал бы высокую производительность машинного устройства и высокое качество продукции. Наименьшие капитальные затраты на устройство электропривода и эксплуатационные расходы на единицу продукции (автоматизированный сокращает расходы на обслуживающий персонал), текущий и капитальный ремонты, расход энергии, то есть на наименьшую себестоимость единицы продукции электропривода содержится в приводных характеристиках рабочей машины: технологической, кинематической, механической, инерционной, нагрузочной и энергетической [1].
2 РАСЧЕТ И АНАЛИЗ ПРИВОДНЫХ ХАРАКТЕРИСТИК НАВОЗОУБОРОЧНОГО ТРАНСПОРТЕРА
2.1 Технологическая характеристика
Скребковый навозоуборочный транспортер установлен в двухрядном коровнике (рисунок 2.1) и убирает навоз от 120 коров. Он состоит из горизонтальной и наклонной части с раздельным приводом. Цепь горизонтального транспортера 1 длиной 140 м движется по каналу 3 и перемещает скребками 2 навоз в сторону наклонного транспортера 4 с длиной цепи 12 м. Наклонный транспортер подает навоз в транспортную тележку 5. Период уборки заканчивается после того, как цепь горизонтального транспортера совершит 1,05 оборота и скребки очистятся от навоза [1]. Электропривод горизонтального 6 и наклонного 7 транспортера установлен в месте разгрузки. Сначала включается наклонный транспортер, затем горизонтальный. Отключение осуществляется в обратном порядке.
Перед началом уборки навоз сбрасывается в канал и практически весь находится в канале. В качестве подстилки применяется резаная солома, навоз убирается два раза в сутки. Наклонный транспортер установлен под углом 24°.
Анализ технологической схемы позволяет сделать следующие выводы:
-транспортер работает в помещении с агрессивной и влажной средой;
-электропривод нужен нерегулируемый;
-горизонтальный транспортер работает с переменной нагрузкой, наклонный, после заполнения желоба навозом − с постоянной;
-для привода транспортеров необходимо использовать асинхронные электродвигатели с короткозамкнутым ротором и химовлагостойкой изоляцией.
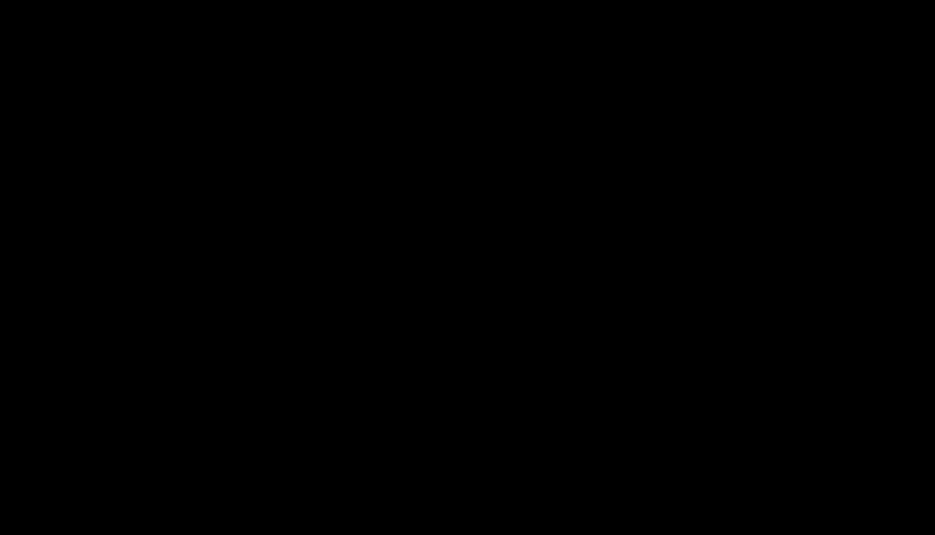
Рисунок 2.1 − План двухрядного коровника с установкой навозоуборочного транспортера ТСН.
2.2 Кинематическая характеристика
Кинематическая характеристика показывает последовательность передачи движения от двигателя к рабочим органам машины и изображается в виде схемы. Она дает сведения о характере движения, величине передаточных отношений, угловой и линейной скорости, позволяет рассчитать траектории движения и возникшие ускорения движущихся масс машины. Кинематическая характеристика позволяет выявить наличие зазоров и оценить их влияние на изменение момента сопротивления и инерции при пуске. Используя передаточные отношения, определяют приведенный момента сопротивления и инерции.
К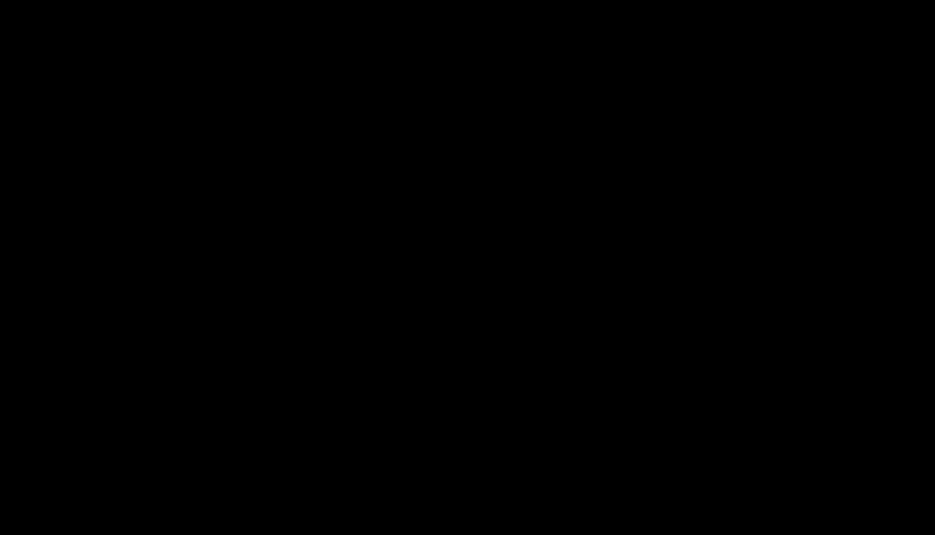 инематическая
характеристика транспортера заключается
в следующем (рисунок 2.2). Ведущая звёздочка
горизонтального транспортера получает
движение от электродвигателя с помощью
редуктора и ременной передачи, а наклонный
с использованием только редуктора.
Скорость движения транспортерной цепи
горизонтального транспортера 0,19 м/с,
наклонного − 0,72 м/с. Число зубьев
приводной звездочки горизонтальной
цепи Z=13,
наклонной части Z=6.
Зацепление с цепью у горизонтального
транспортера осуществляется через зуб.
Шаг цепи горизонтального и наклонного
транспортеров 0,12 м. Шаг скребков
горизонтального транспортеров 1,12м,
наклонного − 0,65м. Усредненная масса
одного метра цепи со скребками 6 кг.
инематическая
характеристика транспортера заключается
в следующем (рисунок 2.2). Ведущая звёздочка
горизонтального транспортера получает
движение от электродвигателя с помощью
редуктора и ременной передачи, а наклонный
с использованием только редуктора.
Скорость движения транспортерной цепи
горизонтального транспортера 0,19 м/с,
наклонного − 0,72 м/с. Число зубьев
приводной звездочки горизонтальной
цепи Z=13,
наклонной части Z=6.
Зацепление с цепью у горизонтального
транспортера осуществляется через зуб.
Шаг цепи горизонтального и наклонного
транспортеров 0,12 м. Шаг скребков
горизонтального транспортеров 1,12м,
наклонного − 0,65м. Усредненная масса
одного метра цепи со скребками 6 кг.
Рисунок 2.2 − Кинематическая схема горизонтального (а) и наклонного (б) транспортеров: 1 – электродвигатель; 2, 3 – многоручьевые шкивы; 4 – ремни; 5 – редуктор; 6 – приводная звездочка; 7 – соединительная муфта.
Анализ кинематической схемы показывает, что рабочие органы совершают поступательное движение. В схеме присутствуют зазоры, упругие элементы, и ее можно представить виде многомассового звена (рисунок 2.3). Зазоры и упругие элементы оказывают существенное влияние на изменение момента сопротивления и инерции в период трогания транспортера.
Учитывая небольшую частоту вращения приводных звездочек, выбираем для горизонтального транспортера электродвигатель с синхронной частотой вращения 1000 об/мин, для наклонного − 1500 об/мин.
Для определения передаточного отношения ременной передачи и редуктора определим угловую скорость ведущих звездочек.
Для горизонтального транспортера
![]() ,
рад/с (2.1)
,
рад/с (2.1)
где VЦГ=0,19 − скорость цепи горизонтального транспортера, м/с;
t=0,12 − шаг цепи транспортера, м;
ZГ=6 − число зубьев звездочки, участвующих в зацеплении.
![]() рад/с
рад/с
Для наклонного транспортера
![]() ,
рад/с (2.2)
,
рад/с (2.2)
где VЦН=0,72 − скорость цепи наклонного транспортера, м/с;
t=0,12 − шаг цепи транспортера, м;
ZН=6 − число зубьев ведущей звездочки.
![]() рад/с
рад/с
Общее передаточное число для горизонтального транспортера
![]() ,
(2.3)
,
(2.3)
где ![]() − синхронная угловая скорость двигателя
горизонтального транспортера, рад/с
− синхронная угловая скорость двигателя
горизонтального транспортера, рад/с

Рисунок 2.3 − Кинематическая схема навозоуборочного транспортера, представленная в виде многомассового звена при включенном (а) и отключенном (б) двигателе.
![]() ,
рад/с (2.4)
,
рад/с (2.4)
где ![]() =1000
− синхронная частота вращения, об/мин;
=1000
− синхронная частота вращения, об/мин;
![]() рад/с
рад/с
![]()
Передаточное число редуктора наклонного транспортера
![]() ,
(2.5)
,
(2.5)
где ![]() − синхронная угловая скорость двигателя
наклонного транспортера, рад/с
− синхронная угловая скорость двигателя
наклонного транспортера, рад/с
![]() ,
рад/с (2.6)
,
рад/с (2.6)
где ![]() =1500
− синхронная частота вращения, об/мин;
=1500
− синхронная частота вращения, об/мин;
![]() рад/с
рад/с
![]()
Учитывая, что для машин длинным тяговым или рабочим органом не рекомендуются червячные редукторы, выбираем для горизонтального и наклонного транспортеров цилиндрические редукторы. Их окончательный выбор будет осуществлен после подсчета передаваемой мощности на быстроходном и тихоходном валу.