

Расчёт быстровращающихся деталей (или колебаний)
Значится доля повреждённой в современных машинах происходит в следующем направлении, возникающих при колебании.
При возникновении неустойчивых состояний типа «резонансных» наступает разрушение оборудования.
При отклонении упругой системы от положения равновесия при внезапном приложении, а затем устранении внешних нагрузок возникают колебания.
Основной причиной возрастания колебаний является неуравновешенность упругих сил и сил, действующих на систему.
Источником колебаний также служит в большинстве случаев, неуравновешенность вращающихся узлов и деталей различных устройств типа дисков, роторов, центрифуг, сепараторов, роторов эл. двигателей и машин, где вибрация является движущей силой процесса (вибро-грохоты, вибро-мельницы).
Сумма всех отклонений системы от положения равновесия называется эксцентриситетом.
Эксцентриситет может появится в системах за счёт: 1) изгиба вала при монтаже и транспортировке; 2)несовпадения центров масс вала и насаженных на него деталей; 3) неравномерная загрузка оборудования.
Обычно для механических систем задаётся допускаемая величина эксцентриситета.
Принимается как функция вращения вала допускаемая величина эксцентриситета принимается как допуск на изготовление и эксплантацию.
Для теплового и котельного оборудования:
 ,
MK,n
– об/мин.
,
MK,n
– об/мин.
Для
электрооборудования:
 ;
;
Для
аппаратов с мешалками:
 ,
М.
,
М.
Колебаниями называется процесс, при котором характеризующей его величине свойственны переходы от возрастания к убыванию.
Эти переходы чередуются с убыванием к возрастанию.
Если колебания представляют собой механическое движения или перемещения какого-либо механического тела, колебания называются механическими.
Колебания с малыми амплитудами называются вибрациями.
Проектирование систем, связанных с колебаниями рассматривают 2-е задачи динамики: 1)известны скорость вращения деталей, необходимо определить устойчивость формы; 2)известны геометрические параметры, необходимо определить критические значения скоростей.
Чаще решается 1-я задача.
Все колебательные процессы рассматриваются в 3-х разделах: 1)колебания тел, одно из измерений которого(толщина) больше 2-х других (фундаменты, перекрытия); 2)колебания тел, два измерения которых соизмеримы(обечайки); 3) колебания тел, одно из измерений которых значительно меньше 2-х других (валы).
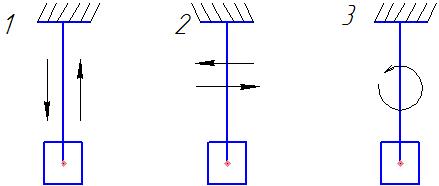
При решении задачи рассматриваются 3 типа колебаний: 1) продольные колебания сечение стержня колеблется вдоль центральной оси; 2) поперечные колебания сечения стержня колеблется перпендикулярно центральной оси; 3) крутильные колебания (подобны колебанию струн).
Наиболее опасными являются колебания имеющие наибольшую частоту собственных колебаний или поперечные колебания.
В основе всех видов и типов колебаний лежит прямая зависимость между деформациями и силами упругости.
Эта зависимость линейная. Механизм взаимодействия сил одинаков для всех видов и типов, поэтому все колебания описываются линейными дифференциальными уравнениями.
Зависимости, полученные для какой-нибудь системы, распространяются на все виды и типы.
Все упругие системы различают по числу степеней свободы, т.е. по числу независимых координат, определяющих положение системы в плоскости и пространстве.
Число степеней свободы – это число механических перемещений или движений, которое может совершать одновременно данная система или это число независимых координат, определяющих положение системы в пространстве.
В пространстве степеней свободы – в плоскости – 3.
Решить реальную систему с таким числом степеней свободы трудно, поэтому при решении технических задач задаются числом степеней свободы=1.
Это позволяет рассматривать систему как точку; затем закономерности движения точки переносить на свою систему, т.е. при решении задачи ограничится значением одного параметра.
В конструкциях различного типа оборудования геометрия систем сложная, т.е. число ст. свободы для каждой системы велико и их сведение к единице значительно облегчает задачу.
Все
колебательные процессы можно разделить
на 2-а вида: 1)вынуждение колебаний с
частотой
 ;
2)собственные колебания с частотой
собственных колебаний
;
2)собственные колебания с частотой
собственных колебаний
 .
.
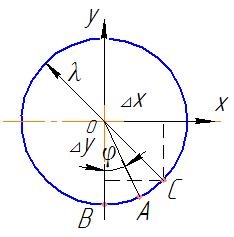
Проводим
окружность с радиус-вектором « ».
На этой окружности берём точку А.
«Положение точки А определяется углом
АОВ.
».
На этой окружности берём точку А.
«Положение точки А определяется углом
АОВ.
Точка
движущееся по окружности радиусом 𝛌
с постоянной угловой скоростью
и в какой-то промежуток времени пройдя
путь
t
займёт положение ВОС определяемое углом
(
t+ .
.
Если спроектировать положение точки С на ось Х или ось Y, получим отклонение точки (системы) от положения равновесия.
Проекция этой точки на ось Х или Y даст текущее отклонение системы от положения равновесия.
 t+
t+
Max-возможные отклонение системы 𝛌 или амплитуда, при превышении которого система разрушается.
 -фаза
колебаний – определяет положение
системы не только в данный момент
времени, но и в каждый последующий момент
времени.
-фаза
колебаний – определяет положение
системы не только в данный момент
времени, но и в каждый последующий момент
времени.
Из
положения «С» при фазе
 система движется вправо. При фазе
система движется вправо. При фазе
 - влево.
- влево.
Фазы,
отличающиеся на 2 - одинаковые. Тогда 2
называется периодом.
- одинаковые. Тогда 2
называется периодом.
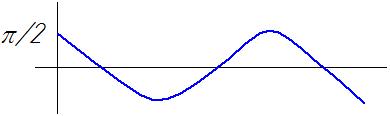
Колебания, подчиняющиеся законам синуса, идут от центра вправо, со скоростью, направленной вправо.
Колебания,
подчиняющиеся закону косинуса начинаются
с периода
 со скоростью направленной влево.
со скоростью направленной влево.
- частота круговых
колебаний или круговая частота, или
угловая скорость. Период колебаний
 ;
;
 .
.