

26,27Принцип построение систем автоматического управления.Регулирование по отклонению.
27Принцип регулирование по возмущению.Комбинированные регулирование.
Построение САР базируется на ряде общих принципов регулирования, основные из которых следующие: регулировании по отклонению, регулирование по возмущению, комбинированное регулирование и принцип адаптации. Принцип регулирования по отклонению
поясняется
схемой состоящей из двух составных
частей - объекта регулирования ОР
и
регулятора Р,
взаимосвязанных
между собой цепью обратной связи.
Регулируемый параметр у(t)
сравнивается
с заданным значением g(t).
На
основании разности этих двух величин
ε(t)
=
g(t)
- у(t) вырабатывается
регулирующее воздействие r(t).Величина
ε(t),
называемая
отклонением или ошибкой системы
регулирования, недолжна превышать
о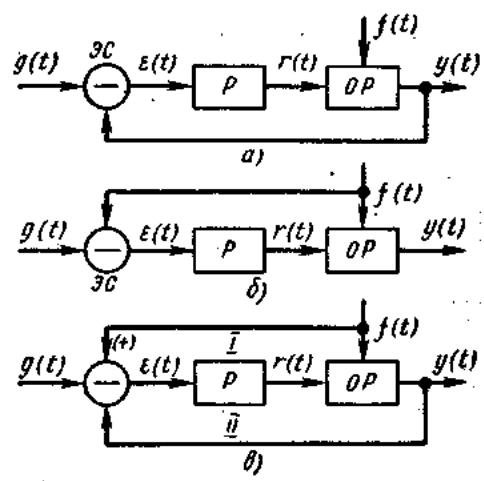 пределенного
значения. а) по отклонению; б) по
возмущению; в) комбинированная.
пределенного
значения. а) по отклонению; б) по
возмущению; в) комбинированная.
А) Отличительной чертой систем, построенных по данному принципу, является их универсальность. Это качество проявляется в том, что любое отклонение регулируемого параметра от его заданного значения вызывает появление регулирующего воздействия независимо от числа, вида и места приложения возмущений f(t). Одним регулирующим воздействием часто достигается удовлетворительная компенсация нескольких возмущений. Это особенно важно, когда объект регулирования подвержен воздействию многочисленных возмущений, влияние которых на регулируемый параметр невозможно предусмотреть.
Б) Сущность принципа регулирования по возмущению или принципа компенса-
ции, состоит в том, что из различных возмущений, действующих в системе, выбира-
ется одно, главное, на которое и реагирует САР (рис. 2.5, б). В этом случае ком-
пенсируется влияние на регулируемый параметр только основного возмущающего
воздействия и регулирующее воздействие вырабатывается в системе в зависимости
от результатов измерения основного возмущения, действующего на объект.
В) Сочетает в себе принципы регулирования по отклонению и повозмущению.
28. Статические и астатические САР.
Статической САР называется такая система, в которой в установившемся состо-
янии имеется однозначная зависимость между отклонением регулируемого пара-
метра от заданного значения и величиной возмущающего воздействия, например,
изменением нагрузки объекта регулирования. В статических системах регулиро-
вания значение регулирующего воздействия r(t) однозначно связано с отклонени-
ем регулируемого параметра у (t) от его заданного значения. Поэтому для
создания необходимого регулирующего воздействия нужно, чтобы имело место
отклонение регулируемого параметра. Вследствие этого в статической САР всегда
имеется остаточное отклонение регулируемого параметра от заданного значения.
Примером простейшей статической системы может служить автоматический
регулятор уровня жидкости
Астатической САР называется такая система, которая в установившемся режи-
ме не имеет остаточного отклонения регулируемого параметра при любой величине возмущения. Значение регулируемого параметра не зависит от нагрузки