

МинистерствО образования и науки Российской Федерации
Воронежская государственная технологическая академия
Кафедра теоретической механике
УТВЕРЖДАЮ
Зав. кафедрой
____________ В.Н. Колодежнов
подпись
________________
дата
Пояснительная записка
к курсовому проекту по курсу «Теория механизмов и машин»
на тему «Синтез и анализ плоских механизмов»
Автор проекта:
Специальность: 260601 «Машины и аппараты пищевых производств»
Обозначение проекта: КП–02068108–ТММ–260601–07.01–2010
Руководитель проекта __________________________ А.В. Колтаков
подпись
Проект защищен _____________________________________________________
дата оценка
Воронеж 2010
МинистерствО образования и науки Российской Федерации
Воронежская государственная технологическая академия
Кафедра теоретической механике
УТВЕРЖДАЮ
Зав. кафедрой
____________ В.Н. Колодежнов
подпись
________________
Дата
Задание на курсовоЙ проект
1. Тема «Синтез и анализ плоских механизмов»
2. Срок представления проекта к защите 5.12.2010
3. Задание к проектированию
3.1 Провести метрический синтез и кинематический анализ шарнирного механизма
Исходные данные:
структурная схема механизма –
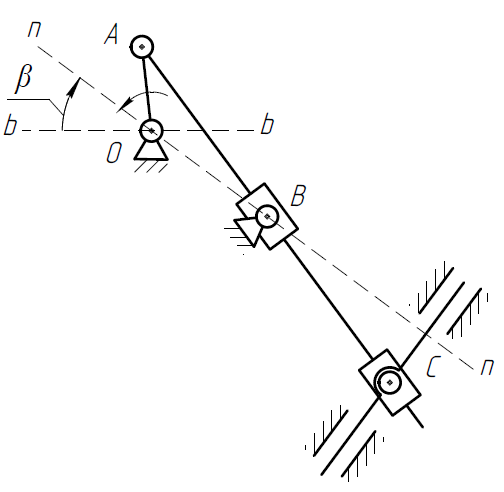
коэффициент неравномерности движения ведомого звена (k) – 1.9
ход ведомого звена (Н, м) – 0.28;
угол ориентации механизма (β, град) – 55;
угловая скорость ведущего звена (ω1, с-1) – 21.
3.2 Провести синтез кулачкового механизма.
Исходные данные:
тип кулачкового механизма – кулачковый механизм с коромысловым толкателем;
вид замыкания высшей кинематической пары – силовое;
закон изменения аналога ускорения движения толкателя – трапецеидальный;
максимально
допустимый угол давления ( ,
град) – 30°
,
град) – 30°
максимальный ход толкателя (Smax, м) – 0.032;
относительные временные интервалы фазовых перемещений толкателя:
фазы
удаления
 – 0.23;
– 0.23;
фазы
дальнего выстоя
 – 0.2;
– 0.2;
фазы
возврата
 – 0.22.
– 0.22.
3.3 Провести синтез зубчатой передачи.
Исходные данные:
межцентровое расстояние
( ,
мм) – 123.5;
,
мм) – 123.5;
передаточное отношение (u) – 2;
модуль зацепления (m, мм) – 5.
способ
нарезки колес – обкатка инструментальной
рейкой ( ,
,
 ).
).
3.4 Провести силовой расчет второго положения механизма.
Исходные данные:
величина
силы полезного сопротивления
 ;
;
плотность
материала звеньев
 .
.
Руководитель проекта _____________________ Колтаков А.В.
подпись
Задание принял к исполнению _______________
подпись
Содержание
Глава 1. Метрический синтез и кинематическое исследование шарнирного механизма 5
1.1 Структурный анализ механизма 5
1.2 Метрический синтез механизма 7
1.3 Кинематический анализ механизма методом векторных диаграмм 7
1.3.1 Векторные уравнения для построения планов скоростей и ускорений 7
1.3.2 Построение планов скоростей 10
1.3.2 Построение планов ускорений 11
Глава 2. СИНТЕЗ КУЛАЧКОВОГО МЕханизма 15
2.1 Построение диаграмм аналогов ускорения, скорости и перемещения толкателя 15
2.2 Определение минимального радиуса кулачка 19
2.3 Построение профиля кулачка 19
Глава 3. Синтез зубчатого зацепления 20
3.1 Построение диаграмм аналогов ускорения, скорости и перемещения толкателя 20
3.2 Расчет параметров зубчатых колес 20
3.3 Описание построения картины эвольвентного зацепления 22
Глава 4. силовой расчет механизма 24
4.1 Расчет активных сил и сил инерции 24
4.2 Кинетостатический расчет механизма 24
4.3 Расчет реакции от отброшенного электродвигателя с помощью «рычага» Жуковского 25