

СОДЕРЖАНИЕ
Введение 4
1 Раздел 1. Описание принципа работы САУ 8
2 Раздел 2. Математическое описание САУ 8
3 Раздел 3. Исследование САУ без корректирующего звена 8
3.1 Исследование САУ по критерию Гурвица 8
3.2 Исследование САУ по критерию Михайлова 8
3.3 Исследование САУ по критерию Найквиста 8
3.4 Исследование САУ по логарифмическому критерию 8
3.5 Статическая ошибка САУ 8
4 Раздел 4. Исследование САУ с корректирующим звеном 8
4.1 Исследование САУ по критерию Гурвица 8
4.2 Исследование САУ по критерию Михайлова 8
4.3 Исследование САУ по критерию Михайлова 8
4.4 Исследование САУ по логарифмическому критерию 8
4.4 Дифференциальное уравнение замкнутой САУ 8
5 Раздел 5. Исследование САУ в среде Simulink 8
Заключение 8
Список использованной литературы 8
ВНИМАНИЕ!!!! ЧИТАТЬ ДАЛЕЕ!!!!
РАБОТАТЬ со включенными непечатаемыми символами «¶».
Лист содержания идет 3-м листом ПЗ после тит. листа и листа задания.
На странице содержания рамка 40 мм, на последующих должна быть тоненькая рамка 15мм как в образце!!!
Под данным текстом расположен разрыв раздела, который ни каким образом не должен попасть на следующую страницу, иначе поедет автонумерация в рамках, но в принципе можно подправить руками!!!!
обязательно внедрить шрифты Gost type A и B в Windows иначе текст в рамках будет отображаться некорректно.
Рамки расположены в колонтитулах, для их редактирования кликаем 2 раза по основной надписи.
РАМКИ НЕ СДВИГАТЬ!!!
Рамки немного уменьшил по сравнению со стандартом, для того чтобы любой принтер смог их полностью отпечатать
Здесь разрыв раздела, включите непечатаемые символы «¶»!!!
Введение
Привести определения автоматического управления и фундаментальных принципов управления.
В курсовой работе по теории автоматического управления и электрическим измерениям (ТАУ и ЭИ) требуется провести анализ и синтез системы автоматического управления (САУ), содержащей контур с жесткой отрицательной обратной связью. Вкратце описать назначение системы….
Описать цель курсовой работы, суть анализа и синтеза, методики, используемые в работе.
Выполнение работы позволит студентам получить навык исследования одноконтурных систем управления на устойчивость различными классическими способами. Курсовая работа выполняется в течение семестра и способствует закреплению знаний по дисциплине «Теория автоматического управления и электрические измерения».
Раздел 1. Описание принципа работы сау
Скорость вращения вала двигателя постоянного тока (ДПТ) задается напряжением UЗ, которое через сопротивление R3 подается на вход операционного усилителя (рис. 1.1). Также на него подается через сопротивление R1 напряжение с тахогенератора UТГ. При увеличении нагрузки MC уменьшается скорость вращения вала двигателя ωД и соответственно снижается напряжение тахогенератора UТГ. Суммарное напряжение Uε увеличивается, следовательно, увеличивается напряжение обмотки возбуждения генератора (ОВГ), напряжение на двигателе и угловая скорость. При уменьшении нагрузки MC увеличивается напряжение тахогенератора UТГ. Суммарное напряжение Uε уменьшается, при этом уменьшается напряжение ОВГ и угловая скорость ДПТ снижается.
Угловая скорость ωД изменяется с изменением нагрузки на валу двигателя МС. В результате можно записать, что помеха равна:
f(t) = kf MC(t), (1.1)
где kf – передаточный коэффициент двигателя по каналу помехи.
Стабилизация угловой скорости ωД достигается за счет подачи напряжения UД на якорную обмотку двигателя. САР является статической, поэтому работает со статической ошибкой, которая не должна превысить заданной величины.
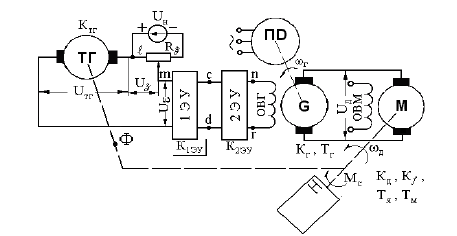
Рис. 1.1. Принципиальная схема системы стабилизации угловой скорости ДПТ
В таблице 1 приведены значения коэффициентов математических моделей элементов системы. Данные значения будут использоваться при анализе и синтезе системы.
Таблица 1. Исходные значения коэффициентов системы
№ Варианта |
Т1, с |
ТМ, с |
ТЯ, с |
K1, В/в |
KД, Рад/Вс |
Kf, Рад/ сим |
KТГ, Вс/рад |
KЭУ, В/В |
Мсном, Н·м |
Δωдном, рад/с |
Δωдст рад/с |
|
0,2 |
0,15 |
0,035 |
0,5 |
1,3 |
6,6 |
0,36 |
10 |
9,0 |
200 |
3,00 |
|
Постоянная времени генератора |
Электромеханическая постоянная времени двигателя |
Электромагнитная постоянная времени двигателя |
Передаточный коэффициент генератора |
Передаточный коэффициент двигателя по управляющему воздействию |
Передаточный коэффициент двигателя по возмущающему воздействию |
Передаточный коэффициент тахогенератора |
Передаточный коэффициент электронного усилителя |
Номинальный момент сопротивленияна валу двигателя |
Номинальная угловая скорость |
Требуемая статическая ошибка системы |
Раздел 2. Математическое описание сау
Для проведения анализа системы необходимо составить математическую модель САУ, которая будет состоять из передаточных функция отдельных звеньев. При математическом описании воспользуемся методами декомпозиции и композиции системы. Принципиальная схема САУ (рис. 1.1) может быть представлена в виде структурной блок-схемы (рис. 2.1), состоящей из отдельных элементов – звеньев системы. Каждое звено имеет свое математическое описание в виде дифференциального уравнения.
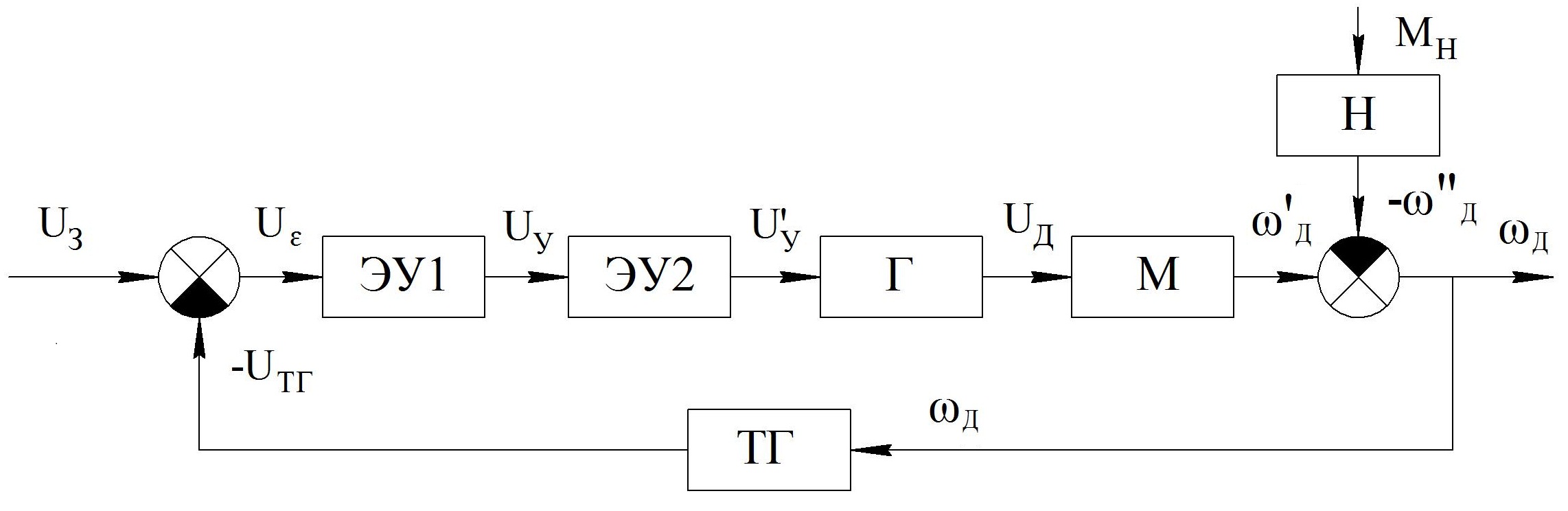
Рис. 2.1. Блок–схема системы стабилизации угловой скорости ДПТ
Дифференциальные уравнения звеньев системы могут быть составлены с применением известных в электромеханике законов. [**]:
1. ЭУ – электронный усилитель:
![]() , (2.1)
, (2.1)
где kЭУ – коэффициент электронного усилителя.
2. Г – генератор:
![]() , (2.2)
, (2.2)
где k1 – коэффициент генератора, Т1 – постоянная времени генератора.
3. М – двигатель постоянного тока:
 , (2.3)
, (2.3)
где kД – коэффициент двигателя по управляющему воздействию, kf – коэффициент двигателя по возмущающему воздействию, ТМ – электромеханическая постоянная времени двигателя, ТЯ – электромагнитная постоянная времени двигателя.
4. ТГ – тахогенератор:
![]() . (2.4)
. (2.4)
где kТГ – коэффициент тахогенератора.
По уравнениям звеньев САУ получим их передаточные функции. Понятие передаточная функция является наиболее важной категорией в теории автоматического управления и регулирования. Передаточная функция является своего рода математической моделью АСР, т.к. полностью характеризует динамические свойства системы.
Передаточной функцией называется отношение изображения выходного сигнала Y(p) к изображению входного воздействия X(p) при нулевых начальных условиях:
![]() , (2.5)
, (2.5)
где р – оператор Лапласа.
Передаточные функции звеньев системы получаем, используя определение передаточной функции и выражение (2.5):
1. ЭУ – электронный усилитель:
 . (2.6)
. (2.6)
2. Г – генератор:
![]() ; (2.7)
; (2.7)
 . (2.8)
. (2.8)
3. М – двигатель постоянного тока:
Уравнение двигателя постоянного тока в операторной форме имеет вид:
 . (2.9)
. (2.9)
Для двигателя постоянного тока входным воздействием является напряжение UД, возмущающим воздействием момент MН, а выходным угловая скорость ωД (рис. 2.1), таким образом можно применить принцип наложения (суперпозиции) и выделить следующие два случая:
сигнал MН (p) = 0;
сигнал UД (p) = 0.
Тогда, для двигателя постоянного тока, имеющего входы по управлению и по возмущению, можно определить две передаточные функции
по управлению:
 ; (2.10)
; (2.10)
по возмущению:
 . (2.11)
. (2.11)
Тогда, общая передаточная функция двигателя постоянного тока:
 . (2.12)
. (2.12)
4. ТГ – тахогенератор:
 . (2.13)
. (2.13)
5. ЭС – элемент сравнения:
 . (2.14)
. (2.14)