

Теоретический раздел
В системах автоматизации, где требуется точное позиционирование, наиболее распространенными являются электропневматические и электромеханические системы. К электромеханическим автоматическим системам позиционирования относят сервоприводы (переменного, постоянного тока) и электроприводы с шаговыми двигателями как вращательного, так и поступательного действия (линейные).
Д вигатели
являются управляемой нагрузкой. Целью
системы управления двигателем является
управление скоростью или положением
нагрузки. Система управления осуществляет
это путем изменения напряжения или
тока, подводимых к двигателю в зависимости
от входного сигнала. Входной сигнал
может быть задан вручную, например,
когда оператор нажмет кнопку управления,
или от управляющего контроллера,
например, сигнал от PC
(position
controller).
вигатели
являются управляемой нагрузкой. Целью
системы управления двигателем является
управление скоростью или положением
нагрузки. Система управления осуществляет
это путем изменения напряжения или
тока, подводимых к двигателю в зависимости
от входного сигнала. Входной сигнал
может быть задан вручную, например,
когда оператор нажмет кнопку управления,
или от управляющего контроллера,
например, сигнал от PC
(position
controller).
Системы управления делят на разомкнутые и замкнутые.
В разомкнутой системе управления двигателем, электрические или механические характеристики двигателя являются известными величинами. Например: определенное значение напряжения, приложенное к двигателю, создает определенное значение скорости вращения ротора. Разомкнутая система проектируется так, что определенное значение напряжения или тока двигателя соответствует определенному входному сигналу.
П реимущество
разомкнутых систем заключается в
простоте.
реимущество
разомкнутых систем заключается в
простоте.
Недостатки заключаются в том, что управляющее воздействие не зависит от изменяющихся характеристик двигателя при изменении его нагрузки. В этом случае ошибка должна корректироваться вручную.
В замкнутых системах датчики измеряют как скорость нагрузки, так и положение. Измеряемый выходной сигнал сравнивается с желаемым (требуемым) выходным сигналом, и контроллер вырабатывает корректирующий сигнал.

Д
Н
Недостаток – сложность систем, большое число элементов в системе и соответственно снижение надежности.
К группе замкнутых относятся сервосистемы. Серводвигатели - это двигатели, которые могут точно управляться по скорости, положению и вращающему моменту, в случае объединения в специальную систему сервоконтроля. Серводвигатели могут быть различного исполнения: щеточный постоянного тока, беcщеточный постоянного тока и беcщеточный переменного тока. Стоит заметить, что двигатели, которые были оптимизированы для серво приложений, не являются серводвигателями, по сути. Двигатель не действует, как серво, пока он не объединён в систему с обратной связью и устройством управления.
Режим позиционирования.
Задается положение, в которое должен перейти двигатель. Обратная связь по положению осуществляется с помощью встроенного датчика. Сигнал величины отклонения от положения обрабатывается в модуле позиционирования и поступает в контроллер скорости.

Линейный электродвигатель (рисунок 8) содержит питаемый электрическим током первичный элемент (индуктор), являющийся статором, и вторичный элемент в виде реактивной полосы, выполняющий роль ротора. Индуктор и реактивная полоса разделены воздушным зазором. Неподвижный элемент магнитной системы линейного электродвигателя разомкнут и имеет развернутую в плоскости обмотку произвольной длины, создающую бегущее магнитное поле, а подвижный элемент движется относительно.
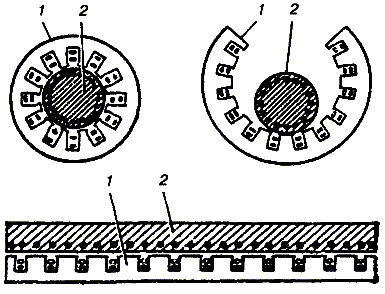
Рисунок 8 - Условная схема преобразования обычного электродвигателя в линейный:1 –статор (индуктор), 2 ротор (реактивная полоса)
Линейный электродвигатель может быть асинхронным и синхронным. Реактивная полоса асинхронного линейного электродвигателя (наиболее распространенная схема), выполненная в виде бруска обычно прямоугольного сечения без обмоток, закрепляется вдоль путепровода, над которым перемещается электровоз, несущий подвижную часть (индуктор) двигателя. Магнитопровод индуктора выполнен с развернутыми многофазными обмотками, питаемыми от источника переменного тока. Вследствие взаимодействия магнитного поля индуктора с полем реактивной полосы возникают силы, которые заставляют перемещаться с ускорением индуктор линейного электродвигателя относительно неподвижной реактивной полосы до тех пор, пока скорости перемещения индуктора и бегущего магнитного поля реактивной полосы не уравняются. Преимуществом такой конструкции является размещение в путепроводе более простой в изготовлении, чем индуктор, реактивной полосы. Возможна схема, в которой в путепроводе размещается индуктор, при этом не требуется передачи электроэнергии на движущийся объект, нет контактного рельса на трассе и токоприемников на подвижном составе. Однако в этом случае вдоль трассы необходимо размещать большое число индукторов. Такая схема целесообразна при большой частоте следования транспортных средств или при подвижном составе большой длины, например, для внутризаводского транспорта.
Применяется и комбинированный вариант, например, с размещением индукторов в путепроводе на участках разгона, торможения, подъема и спуска; на остальной части трассы используется индуктор, установленный на подвижном составе. Линейный электродвигатель получает питание от преобразователя или непосредственно от промышленной сети переменного тока (линейный асинхронный привод).
Управление силой тяги и скоростью движения осуществляется системой автоматического управления и регулирования путем изменения частоты напряжения и силы тока в обмотках двигателя.
Линейный электропривод обеспечивает также торможение подвижного состава, например, противовключением.
Линейный двигатель является электрической машиной, принцип работы которой основан на использовании энергии бегущего магнитного поля. Основное преимущество таких двигателей состоит в отсутствии кинематических цепей для преобразования вращательного движения в линейное, что существенно упрощает конструкцию приводимого в движение механизма и повышает его КПД. Существует большое разнообразие линейных двигателей. В настоящее время больший интерес проявляется к асинхронным линейным двигателям как относительно простым по конструкции.
Стальной сердечник первичного элемента выполняется шихтованным, а в его пазах укладывается многофазная (обычно трехфазная) обмотка. Вторичный элемент выполняется с короткозамкнутой обмоткой, уложенной в пазы стального сердечника, или представляет собой сплошную токопроводящую пластину. Пластина изготовляется из меди, алюминия или ферромагнитной стали. При включении обмотки первичного элемента в многофазную сеть образуется магнитное поле, которое перемещается вдоль магнитопровода со скоростью
V1 = 2τf1
где τ - полюсное деление; f1 - частота питающего напряжения.
При своем перемещении магнитное поле индуктирует во вторичном элементе машины ЭДС. Эта ЭДС вызывает токи, от взаимодействия которых с магнитным полем образуется механическая сила (тяговое усилие), стремящаяся сдвинуть элементы относительно друг друга.
В линейном двигателе в зависимости от его конструкции и назначения возможно относительное перемещение как первичного, так и вторичного элемента. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля
S = (v1 - v) / v1
где v - скорость движения элемента.
Номинальное скольжение линейного двигателя равно 2-6%.
На работу линейного двигателя оказывают существенное влияние краевые эффекты, возникающие из-за конечных размеров разомкнутых магнитопроводов элементов. Это приводит к ухудшению таких характеристик, как тяговое усилие, коэффициент мощности и КПД.
Линейные двигатели могут быть успешно применены на ленточных и тележечных конвейерах, в манипуляторах, в металлорежущих станках, где рабочие органы совершают возвратно-поступательное движение.
|