

2.1 Приклад виконання завдання
По похилій площині (рис. 2.6) призми 1 масою m1=10кг спускається вантаж 2 (m2=6кг), який тягне за допомогою невагомої нитки вантаж 3 масою m3=4кг.
Знайти переміщення призми 1 по гладенькій горизонтальній площині, якщо тіло m2 опустилось по похилій площині на S=0,5м.
Розв’язання. Покажемо зовнішні сили, які прикладені до матеріальної системи, що складається з призми 1 та тіл 2, 3. Такими силами є: P1=m1g – сила ваги призми, P2=m2g i P3=m3g – вага відповідно другого та третього вантажів, N – реакція гладенької горизонтальної поверхні.
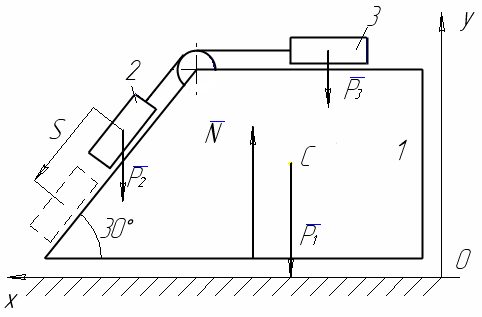
Рисунок 2.6
Запишемо теорему про рух центра мас матеріальної системи в проекціях на вісь Х:
![]() ,
(2.1)
,
(2.1)
де
![]() ,
,
![]() -
проекція головного вектора зовнішніх
сил на вісь Х.
-
проекція головного вектора зовнішніх
сил на вісь Х.
Оскільки
=
0, то
![]() =
0. Тоді
=
0. Тоді
![]() .
.
В початковий момент
часу система знаходилась у спокої і
тому
![]() .
Із формули (2.1) маємо:
.
Із формули (2.1) маємо:
![]() .
.
Таким чином, координата ХС центра мас матеріальної системи залишається сталою незалежно від переміщень тіл, що входять у систему.
Визначимо положення центра мас системи в початковий момент часу:
 . (2.2)
. (2.2)
Якщо вантаж 2
переміститься на величину
![]() ,
тоді тіло 3 – на
,
тоді тіло 3 – на
![]() ,
а призма 1 -
,
а призма 1 -
![]() і положення ХС центра мас знайдемо
за формулою:
і положення ХС центра мас знайдемо
за формулою:
![]() . (2.3)
. (2.3)
Враховуючи (2.2), із формули (2.3) отримаємо:
![]() . (2.4)
. (2.4)
Переміщення
![]() та
та
![]() складається із відносного по призмі і
переносного разом із призмою.
складається із відносного по призмі і
переносного разом із призмою.
![]()
Тепер із формули (2.4) знаходимо переміщення призми.
Знак “мінус” вказує на те, що призма 1 перемістилася в сторону, протилежну додатному напрямку осі Х.
Відповідь: призма 1 перемістилась вправо на 0,229 м.
Д. 3 Використання теореми про зміну головного вектора кількості руху системи для дослідження переміщення тіл
Електродвигун 1 (рис. 3.1 – 3.10 ) масою m1 приєднується до системи нездеформованих пружин. На тілі 2 масою m2 (однорідний диск радіуса R – варіант 1, 4, 7, 10, 13, 16, 19, 22, 25, 28; кільце радіуса R – варіант 2,5,8,11,14,17,20,23,26,29; однорідний стержень ОА = R – варіант 3,6,9,12,15,18,21,24,27,30 ), що з’єднане з ротором електродвигуна 1, закріплена матеріальна точка масою mА на відстані ОА від осі ротора електродвигуна. Ротор обертається з постійною кутовою швидкістю ω. Пружини приєднані до електродвигуна таким чином, що його статор переміщується поступально, а точка 0 по осі х
Знайти закон руху корпуса електродвигуна, центр мас якого О переміщується по вертикалі, побудувати графік руху точки О протягом одного періоду при кутовій швидкості ω = n∙ ρ (ρ – частота, при якій спостерігається явище резонансу), якщо в початковий момент часу точка О зміщена із положення рівноваги на величину λ0 і їй була надана швидкість ν0, а тіло 2 почало обертатись навколо горизонтальної осі О з кутовою швидкістю ω.
Необхідні для розрахунку дані наведені в табл. 3.1.
Таблиця 3.1
Варіант |
m1, кг |
m2, кг |
mА, кг |
R, м |
с1, Н/м |
с2, Н/м |
с3, Н/м |
n |
λ0, м |
ν0, м/с |
1 |
15 |
2 |
0,6 |
0,2 |
2·103 |
3·103 |
1,5·103 |
0,7 |
3·10-2 |
0 |
2 |
18 |
3 |
0,7 |
0,21 |
3·103 |
2·103 |
4·103 |
0,65 |
2,5·10-2 |
1,5 |
3 |
21 |
4 |
0,8 |
0,22 |
4·103 |
1·103 |
5·103 |
1,2 |
2·10-2 |
0,5 |
4 |
23 |
5 |
0,9 |
0,25 |
5·103 |
6·103 |
1·103 |
0,63 |
-1,5·10-2 |
2 |
5 |
25 |
6 |
1,0 |
0,3 |
6·103 |
4·103 |
2·103 |
0,75 |
-10-2 |
-1,5 |
6 |
10 |
1 |
0,5 |
0,15 |
1·103 |
8·103 |
3·103 |
0,8 |
0 |
3 |
7 |
12 |
1,5 |
0,6 |
0,16 |
2·103 |
3·103 |
5·103 |
0,55 |
5·10-2 |
4 |
8 |
13 |
2,5 |
0,7 |
0,17 |
3·103 |
7·103 |
2·103 |
1,3 |
4·10-2 |
-2,5 |
9 |
17 |
3,5 |
0,8 |
0,18 |
4·103 |
9·103 |
1·103 |
1,25 |
-3,5·10-2 |
0,5 |
0 |
19 |
4,5 |
0,9 |
0,19 |
5·103 |
3·103 |
6·103 |
1,3 |
0,5·10-2 |
-2,5 |
|


Рисунок 3.1
|



Рисунок 3.2
|

Рисунок 3.3
|

Рисунок 3.4
|

Рисунок 3.5
|

Рисунок 3.6
|

Рисунок 3.7
|

Рисунок 3.8
|

Рисунок 3.9
|

Рисунок 3.10