

Загальне рівняння динаміки
Д.11 Розрахунок характеристик руху механічної системи за допомогою загального рівняння динаміки
Механічна система
(рис. 11.1 – 11.5) складається з вантажу 1
масою
![]() ,
двох шківів 2 і 3 з масами
,
двох шківів 2 і 3 з масами
![]() і
і
![]() ,
радіусами ступенів
,
радіусами ступенів
![]() і
і
![]() ,
,
![]() і
і
![]() ,
та радіусами інерції
,
та радіусами інерції
![]() ,
,
![]() відповідно і суцільного циліндри-чного
катка 4 масою
відповідно і суцільного циліндри-чного
катка 4 масою
![]() .
На шків 2 або 3, діє постійний момент М.
Вантаж 1, або
каток 4, лежать на гладенькій горизонтальній
або похилій площині з кутом нахилу
чи
.
На шків 2 або 3, діє постійний момент М.
Вантаж 1, або
каток 4, лежать на гладенькій горизонтальній
або похилій площині з кутом нахилу
чи
![]() до горизонталі. Тертя при русі вантажу
1 і ковзання при кочені катка 4 відсутні.
Система
розташована в вертикальній площині.
до горизонталі. Тертя при русі вантажу
1 і ковзання при кочені катка 4 відсутні.
Система
розташована в вертикальній площині.
Визначити прискорення вантажу 1 і натяг троса, який до нього закріплений, якщо масою тросів і тертям в підшипниках шківів нехтуємо.
В остаточних розрахунках прийняти значення параметрів з таблиці 11.1 по варіантах.
Таблиця 11.1
В-т |
кг |
см |
|
град. |
|||||||
|
|
|
|
r2 |
R2 |
r3 |
R3 |
М |
|
|
|
1 |
5 |
0 |
2 |
3 |
10 |
25 |
18 |
35 |
8 |
15 |
45 |
2 |
15 |
4 |
0 |
10 |
8 |
32 |
20 |
36 |
6 |
30 |
60 |
3 |
12 |
0 |
3 |
8 |
12 |
24 |
15 |
30 |
5 |
45 |
30 |
4 |
8 |
5 |
0 |
2 |
6 |
18 |
4 |
32 |
4 |
600 |
15 |
5 |
14 |
0 |
6 |
4 |
9 |
27 |
10 |
20 |
12 |
45 |
60 |
6 |
6 |
2 |
0 |
3 |
3 |
12 |
6 |
24 |
6 |
15 |
60 |
7 |
20 |
0 |
15 |
8 |
14 |
28 |
15 |
30 |
5 |
45 |
75 |
8 |
10 |
6 |
0 |
5 |
8 |
16 |
8 |
32 |
8 |
30 |
45 |
9 |
16 |
0 |
10 |
6 |
6 |
9 |
16 |
32 |
10 |
15 |
45 |
0 |
18 |
3 |
0 |
12 |
5 |
20 |
8 |
24 |
5 |
45 |
60 |
11.1 Приклад виконання завдання
Для механічної
системи, яка наведена на рис. 11.6, задано:
![]() кг,
кг,
![]() кг,
кг,
![]() кг,
кг,
![]() кг,
кг,
![]() м,
м,
![]() м,
м,
![]() м,
м,
![]() .
Радіус інерції ступінчатого барабана
2 рівний
.
Радіус інерції ступінчатого барабана
2 рівний
![]() м,
коефіцієнт тертя ковзання тіла 3 по
горизонтальній площині
м,
коефіцієнт тертя ковзання тіла 3 по
горизонтальній площині
![]() .
Циліндричне тіло 4 котиться по похилій
площині без тертя і без ковзання.
.
Циліндричне тіло 4 котиться по похилій
площині без тертя і без ковзання.
Визначити
прискорення тіла 1 –
![]() ,
тіла 3 –
,
тіла 3 –
![]() ,
натяги тросів
N1
і N3,
до яких ці тіла прикріплені.
,
натяги тросів
N1
і N3,
до яких ці тіла прикріплені.

Рисунок 11.1
Р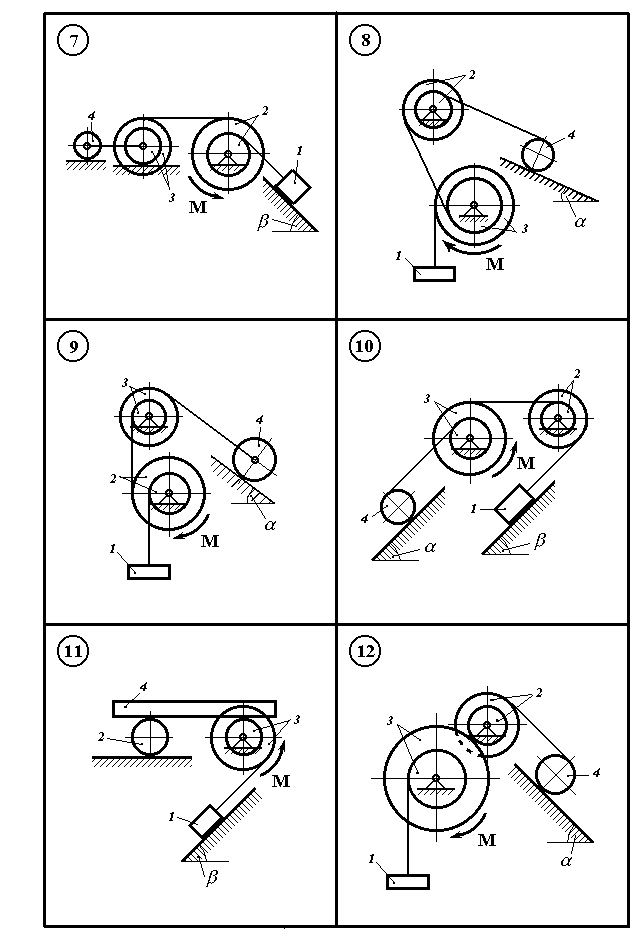 исунок
11.2
исунок
11.2
Рисунок 11.3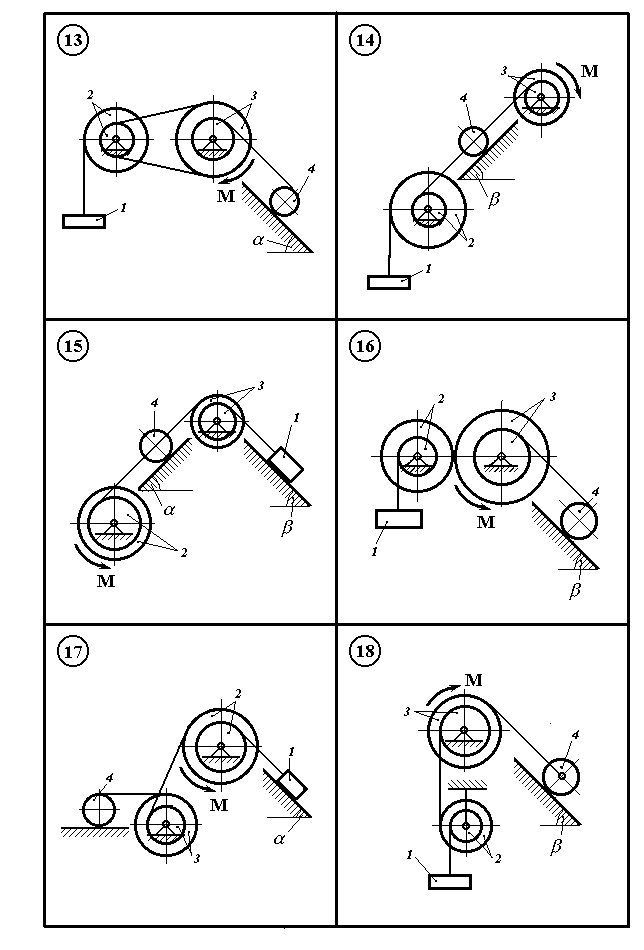
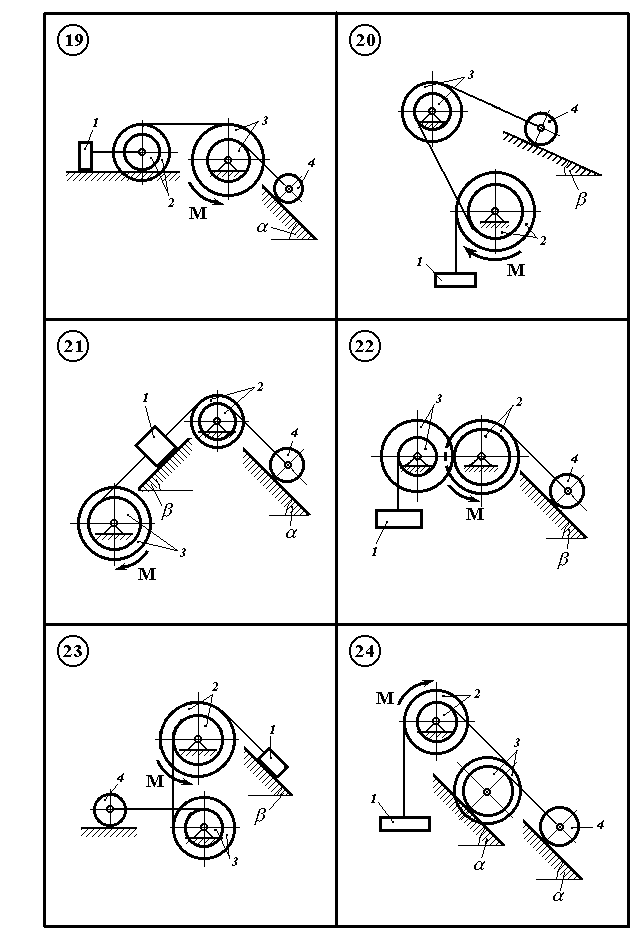
Рисунок 11.4
Р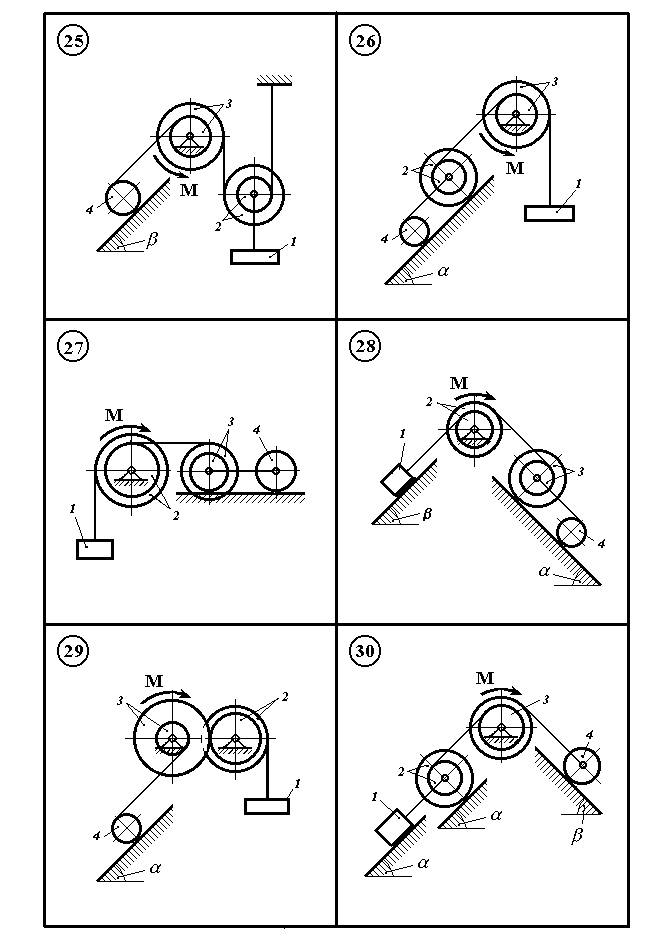 исунок
11.5
исунок
11.5
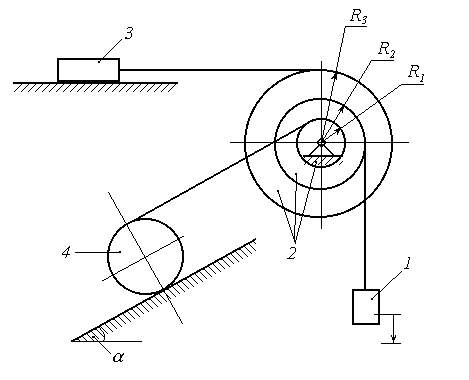
Рисунок 11.6
Розв’язання. Для розв’язування задачі використовуємо загальне рівняння динаміки:
![]() (11.1)
(11.1)
Покажемо для всіх тіл механізму активні сили, напрямки прискорень, інерційні сили і віртуальні переміщення, що зображені на рис. 11.7.
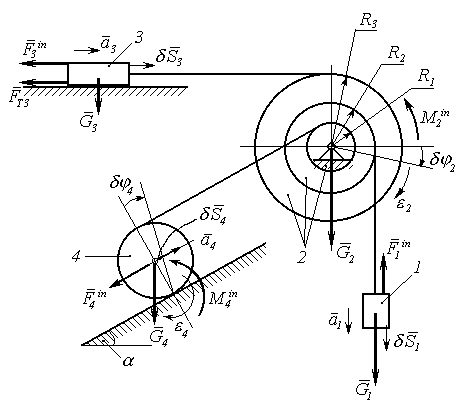
Рисунок 11.7
Активні
сили:
![]() .
.
Інерційні
сили:
![]()
Віртуальні переміщення:
для тіла 1 –
![]() ,
для тіла 2 –
,
для тіла 2 –
![]() ,
для тіла 3 –
,
для тіла 3 –
![]() ,
для тіла 4 –
,
для тіла 4 –
![]() і
і
![]() .
.
Складаємо загальне рівняння динаміки відповідно до формули (11.1).
 (11.2)
(11.2)
В рівняння (11.2) не
ввійшли
сили
![]() і
і
![]() тому, що вони роботи не виконують.
Виразимо віртуальні переміщення
,
,
і
через
.
тому, що вони роботи не виконують.
Виразимо віртуальні переміщення
,
,
і
через
.
![]() ;
;
![]() .
.
Звідки:
![]() ,
,
![]() ,
,
![]() ,
,
![]() (11.3)
(11.3)
Моменти інерції тіл 2 і 4 відповідно рівні:
![]() ,
,
![]() . (11.4)
. (11.4)
Знайдемо активні сили:
![]() ,
,
![]() ,
,
![]() . (11.5)
. (11.5)
Знайдемо інерційні сили:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Виразимо
кутові прискорення
![]() і
і
![]() ,
а також прискорення
,
а також прискорення
![]() і
і
![]() через
через
![]() .
.
![]() ;
;
![]() ,
,
тому
![]() ,
,
![]() ,
,
![]() .
.
Тоді інерційні сили матимуть вигляд:
![]() ,
,
![]() ,
,
![]() ,
,
![]() . (11.6)
. (11.6)
Підставляємо активні сили (11.5), інерційні сили (11.6) і віртуальні переміщення (11.3) в рівняння (11.2)

Після
спрощення і скорочення на
![]() одержуємо рівняння
одержуємо рівняння

звідки
 .
.
Підставимо дані умови:
 м/с2.
м/с2.
![]() м/с2.
м/с2.
Для визначення натягів тросів, що прикріплені до тіл 1 і 3, застосовуємо принцип Даламбера.
Розглянемо сили, які діють на вантаж 1 і покажемо їх на рис. 11.8.
 Згідно з принципом Даламбера
Згідно з принципом Даламбера
![]() .
.
Проектуємо цю векторну рівність на вісь oy, отримаємо:
![]() .
.
Звідки
![]() .
.
Або:
![]() .
.
Рисунок 11.8
Розглянемо сили, які діють на тіло 3, що зображено на рис. 11.9., на основі
п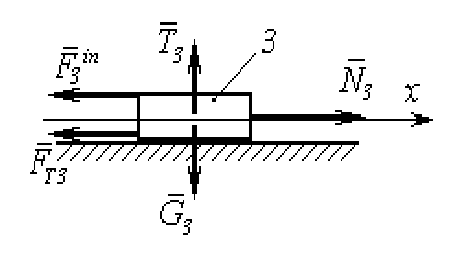 ринципу
Даламбера
ринципу
Даламбера
![]() .
.
Проектуємо це рівняння на вісь ox.
![]() .
.
Рисунок 11.9
Звідки:
![]() .
.
Відповідь: a1=8.43 м/с2, N3=26.4 н.