

3.3 Модернизация приводов трансманипулятора склада длинномерных грузов
Для перемещения вдоль склада используется привод горизонтального перемещения. Для того чтобы обеспечить плавный разгон трансманипулятора и точную остановку по сигналам датчиков, а также движение без перекосов “ног” трансманипулятора. Двигатель типа П-51 мощностью 6 кВт с частотой вращения 1500 об/мин. Заменим на двигатель типа 4A132S4У3 мощностью 7,5 кВт номинальной частотой вращения 1500 об/мин.
В приводе механизма подъема использовался двигатель MTH 511-8 мощностью 30 кВт и частотами вращения 720 об/мин., который был заменен на асинхронный двигатель типа 4А200L6У3 мощностью 30 кВт и частотой вращения 1000 об/мин.
Для управления частотой вращения двигателей использовалась релейная система управления. Недостатками такой организации привода является ступенчатое изменение скорости, не очень надежный режим работы манипулятора. Поэтому в приводах для плавного регулирования скорости по вертикальной и горизонтальной координатам использованы частотные преобразователи, которые позволяют программно устанавливать время разгона, время торможения, требуемый вид механической характеристики на рабочем участке, необходимые для точной остановки скорости (остановочные скорости).
В манипуляторе использованы современные частотные преобразователи фирмы MitsubishiElectrik серии FR-A540(L-G)EC.[10] Эти преобразователи разработаны для механизмов с высокими требованиями к диапазону регулирования, перегрузочной способности вращения двигателя, что в сочетании с большим функциональным набором обеспечивает широкие возможности их применения в общепромышленных машинах и автоматизации.
Оснащенный 64-битным RISC процессором, инвертор реализует автоматическую непрерывную настройку параметров двигателя, что позволяет учитывать изменение параметров, вызванных нагревом двигателя в процессе работы, и, как следствие, обеспечивает высокую стабильность скорости вращения и момент на самых малых частотах.
Диапазон регулирования 1:120. Функции автоматической настройки обеспечивают идентификацию параметров математической модели двигателя.
Для выполнения требований по соответствию европейским стандартам электромагнитной совместимости для инверторов FR-A540(L-G)EC разработаны фильтры, устанавливаемые на заднюю поверхность инвертора или непосредственно под ним. Для ограничения пиковых токов и снижения уровня помех низкочастотной части спектра предусмотрены сетевые реакторы.
Серия FR-A540(L-G)EC сертифицирована по всем основным мировым стандартам.
Сетевой интерфейс RS485 входит в стандартную комплектацию и допускает подключение до 32 инверторов в общую сеть.
Основные технические характеристики инверторов FR-A540(L-G)EC приведены в таблице 3.5[10].
Для двигателей горизонтального и вертикального перемещения манипулятора – штабелера выбираем из модельного ряда модификацию 7,5к и 30к соответственно (смотрите таблицу. 3.5).Схема подключения двигателя к инвертору, источнику питания, тормозным резисторам и контроллеру управления приведена на рисунке 3.6. (лист БНТУ.05.216.018.020)
Распределение клемм силовой цепи и цепей управления для схемы подключения приведены в таблице 3.6[10].
Т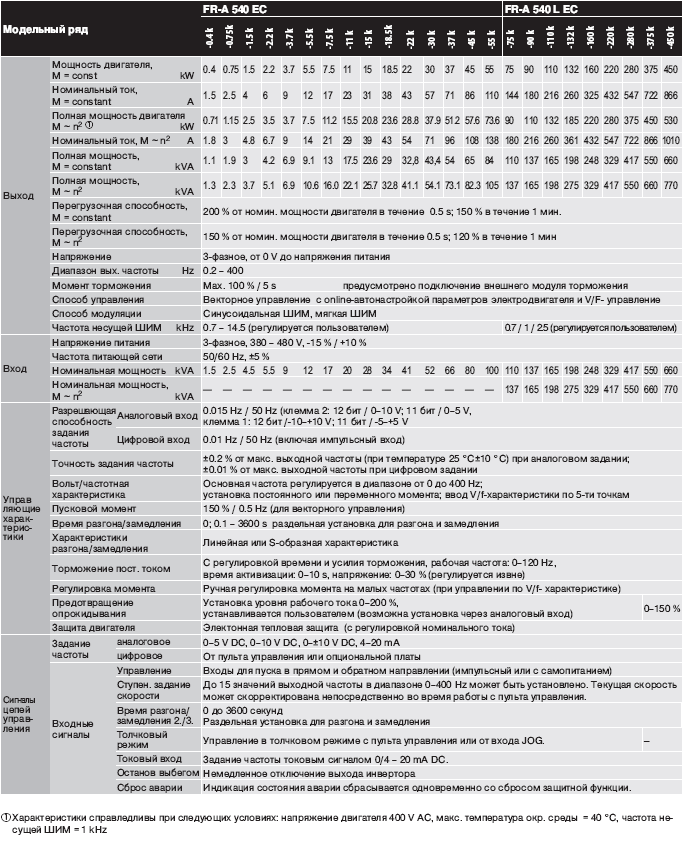 аблица
3.5 -
Характеристики
инверторов FR-A540(L-G)EC
аблица
3.5 -
Характеристики
инверторов FR-A540(L-G)EC
О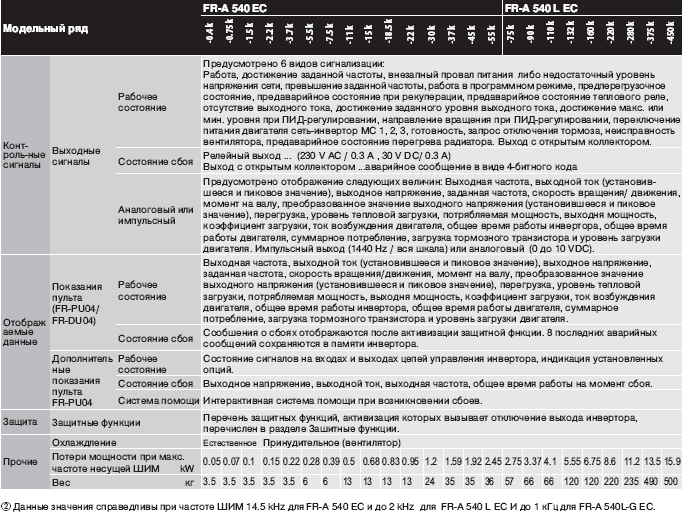 кончание
таблицы 3.5
кончание
таблицы 3.5
Т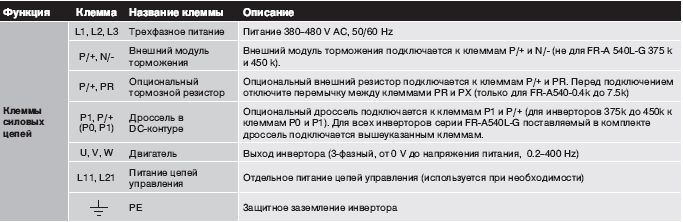 аблица
3.6 -
Распределение
клемм силовых цепей
аблица
3.6 -
Распределение
клемм силовых цепей
Окончание таблицы 3.6
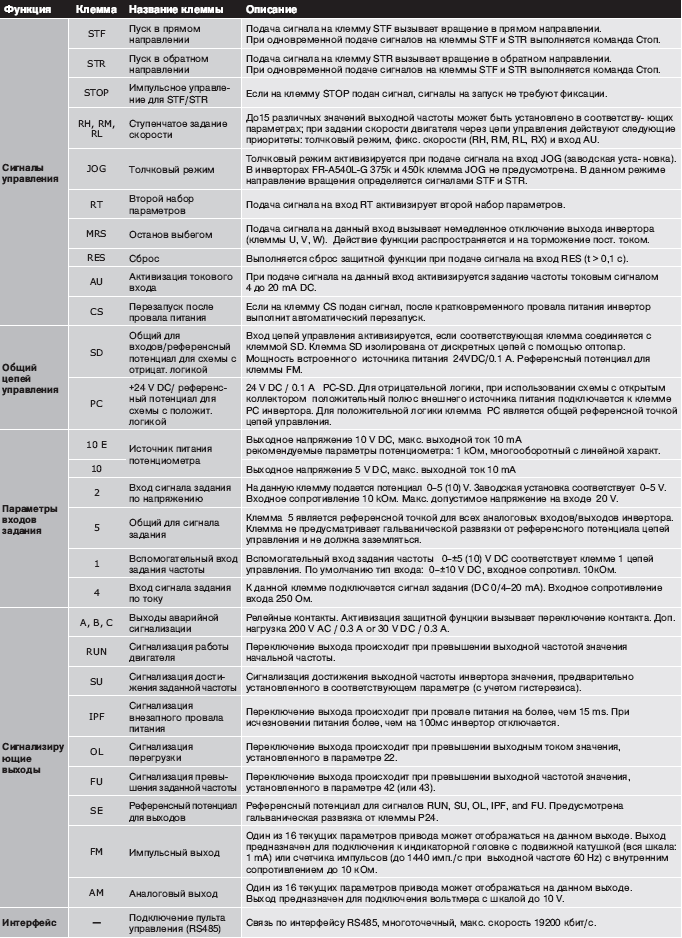
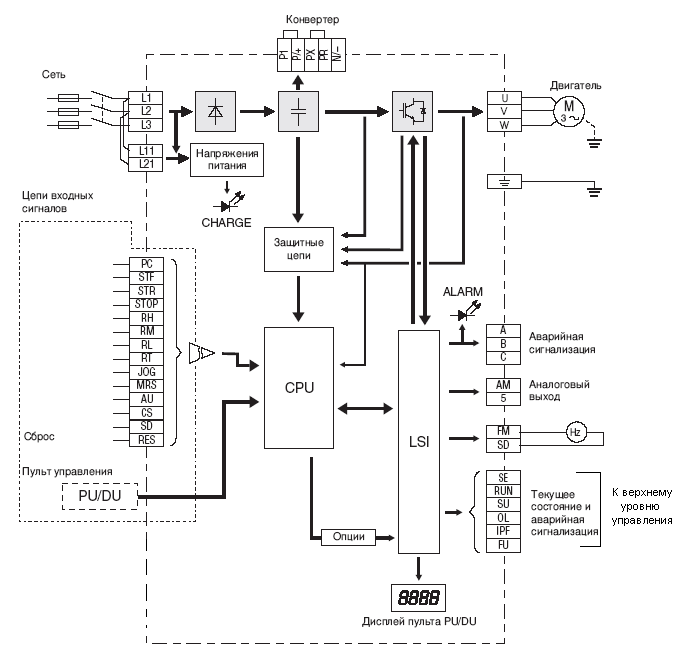
Рисунок 3.4 –Схема подключения двигателя трансманипулятора