

4.2. Переміщення матеріалів
Машини для переміщення матеріалів використовуються для навантажувальних, розвантажувальних і транспортних операцій. Прикладами можуть служити конвеєри, підйомні крани, автонавантажувачі, елеватори. Ці установки вимагають спеціальних приводів для забезпечення вимог безпеки, захищеності і портатив
ності. Часто використовуються двигуни постійного струму для задоволення вимог регулювання швидкості і великого моменту.
На рис. 5.9 показаний електрозавантажувач. Тут через вимоги великого моменту при низькій швидкості використовується привод постійного струму із серієсною обмоткою. У такого двигуна м’яка статична характеристика, чим забезпечується максимальний момент при великих навантаженнях. Швидкість може регулюватися за допомогою реостата, установленого послідовно з двигуном. Цей двигун для мобільності добре поєднати з електричними батареями, від яких він живиться. Однак існує кілька недоліків, включаючи технічне обслуговування колектора, чутливість до вологи і бруду, низьку ефективність. Колекторний двигун постійного струму вимагає частих оглядів і технічного обслуговування, що збільшує час простоїв.
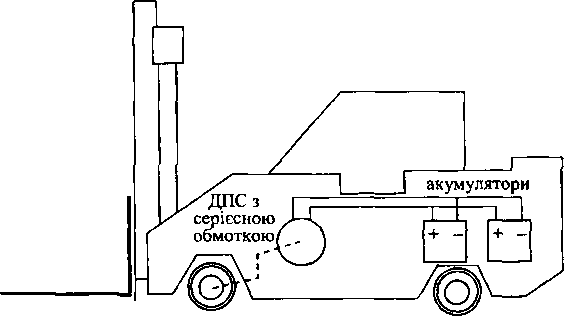
Рис. 5.9
Асинхронні двигуни можуть широко використовуватися в механізмах для переміщення матеріалів. При цьому не потрібно техобслуговування колектора, немає електромеханічних контакторів і комутаційних апаратів, розсіювання енергії в додаткових опорах. Асинхронний двигун для мобільного устаткування також має меншу вагу в порівнянні з ДПС тієї ж потужності. Момент може регулюватися одночасною зміною напруги і частоти для точного керування швидкістю.
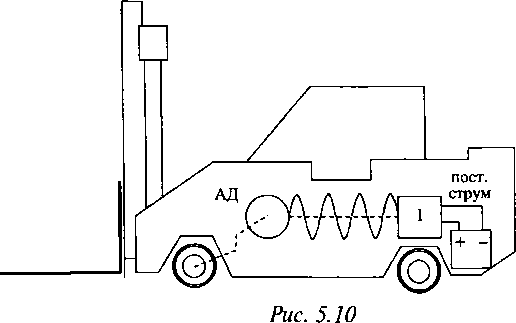
Розглянемо застосування частотно-регульованого електропривода на прикладі електрозавантажувача (рис. 5.10). Тут ми бачимо, що інвертор (І) використовується для перетворення енергії постійного струму батарей в енергію змінного струму змінної напруги і змінної частоти. На трифазному виході інвертора момент поступово збільшується під час пуску АД і залишається постійним для розгону. Коли досягається необхідна потужність, частота на виході інвертора збільшується для досягнення високої швидкості.
Швидкість двигуна може бути швидко знижена за допомогою гальмування в генераторному режимі, що є важливою характеристикою для приводів мобільного устаткування. Рекуперативне гальмування в частотно-регульованому приводі досягається зменшенням частоти інвертора до такого ступеня, щоб відповідна їй синхронна швидкість була нижче, ніж швидкість двигуна. Це змушує двигун працювати в генераторному режимі і перетворювати механічну енергію руху в електричну, яка подається назад на батареї. Ча- стотно-регульований привод із широтно-імпульсною модуляцією найкраще відповідає цьому призначенню, тому що в ньому немає лінії змінного струму, по якій би відбувалася віддача реактивної енергії в мережу. Крім того, немає додаткових інверторних, випрямних кіл і скільки-небудь значної фільтрації. Це робить конструкцію частотно-регульованого привода гранично простою.
Використання частотно-регульованого привода в перевезенні матеріалів дає в результаті поліпшене виконання при підвищеній ефективності. При цьому зменшуються витрати на обслуговування і, завдяки рекуперації, потребуються менші батареї для мобільних установок у порівнянні з приводом постійного струму.