

4.1. Керування потоком рідини і газу
Асинхронні двигуни звичайно використовуються для привода вентиляторів і насосів для транспортування потоків рідин і газів. 232
Вони знаходять застосування у всіх галузях комерційної і промислової діяльності. Прикладами можуть служити вентилятори, піддувала, вентилятори парових котлів, насоси для перекачування грузлих рідин і вентилятори підживлювачів котлів. Звичайно ці двигу- ни працюють при будь-яких навантаженнях з постійною швидкістю. Керування потоком здійснюється з використанням механічних дроселів, клапанів і вентилів.
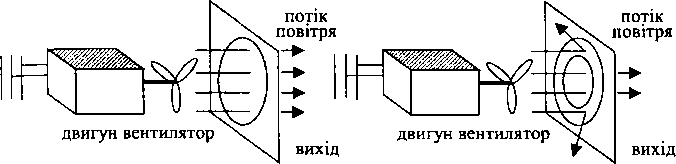
повний потік частковий потік
Рис. 5.7
Типовий приклад показаний на рис. 5.7, де двигун змінного струму приводить вентилятор охолодження. Двигун розрахований за критерієм максимального навантаження; повітря, що перекачується, задовольняє максимальним технологічним вимогам. Якщо процес вимагає меншої кількості повітря, його потік зменшують підстроюванням вихідних дроселів, що обмежують потік. Однак, при обмеженні потоку повітря, споживана потужність двигуна залишається близькою до її номінального значення, хоча потік за вимогами технології набагато менше максимального його значення. Таким чином, при регулюванні потоку механічні дроселі і клапани розсіюють енергію, споживану двигуном, який обертається з постійною швидкістю.
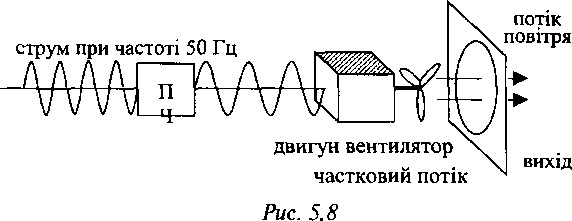
Важливою характеристикою вентиляторів і насосів є те, що потік пропорційний швидкості вентилятора чи насоса. Ця властивість була застосована розробниками в минулому для конструювання ремінних чи редукторних передач, які використовувались Для двигунів з постійною швидкістю обертання. Тепер потік може бути змінений регулюванням швидкості обертання двигуна чи насоса вентилятора, як показано на рис. 5.8.
При низьких швидкостях, зі зменшеним потоком, споживання потужності є лише малою часткою номінальної потужності (рис. 3*5). Енергія, що розсіюється традиційними елементами регулювання при досягненні малих потоків, може бути зекономлена змен
шенням швидкості обертання вентилятора чи насоса. З викорисї танням частотно-регульованого привода швидкість обертання веде, тилятора чи насоса може регулюватися для задоволення вимог процесу без розсіювання енергії (рис. 5.2).
Якщо вентилятор або насос працює на малій швидкості більшу частину робочого циклу, то застосування частотно-регульованого привода дасть відчутний економічний ефект.
Деякі турбомеханізми, що працюють при навантаженні близькому до номінального можуть використовуватися разом з частот- но-регульованим приводом, хоча це і не призведе до істотного заощадження енергії. Такі режими, як керований розгін і гальмування, особливо коли мова йде про вентилятори і насоси з великою інерцією, роблять частотне керування виправданим.
Необхідно також взяти до уваги обмеження моменту і швид* кості, що повинні бути покладені при використанні частотно-ре* гульованого привода в турбомеханізмах. При навантаженнях з великою інерцією, потрібно подбати про обмеження роботи на кривій моменту-швидкості подалі від області зриву моменту. Також повинна бути прийнята до уваги сумісність окремих видів частотно-регульованого привода для підтримки роботи на низьких швидкостях (нижче 20% від максимальної швидкості).