

5. Зниження напруги на затискачах електродвигуна
При неможливості заміни малозавантажених двигунів варто перевірити доцільність зниження напруги на його затискачах. Зниження напруги живлення АД призводить до зменшення споживання реактивної потужності (за рахунок зниження струму намагнічування) і, тим самим, до підвищення сок<р. При цьому одночасно зменшуються втрати активної потужності, тобто збільшується ККД двигуна.
Можливі такі методи зниження напруги малозавантажених асинхронних двигунів:
• перемикання статорної обмотки з «трикутника» на «зірку»;
• секціювання статорних обмоток;
• зниження напруги в силових колах підприємств перемиканням відгалуджень знижуючих трансформаторів;
• застосування найпростішого регульованого електропривода за схемою ТРН-АД.
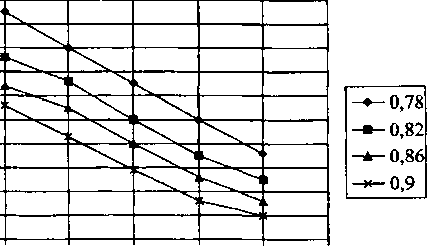
Перемикання статорної обмотки АД з «трикутника» на «зірку» звичайно рекомендують для двигунів напругою до 1000 В, завантажених менше 30%. Ефективність заходів пояснюється рис. 4.14 (тут наведені графіки для значень со$ фн = 0,78; 0,82; 0,86; 0,9) і рис. 4.15.
созфу 2
С08фд 1(9 1,8 1,7 1,6 1,5 1,4 1,3 ІД 1,1 1
0 0,1 0,2 0,3 0,4 0,5 к?
Рис.4.14
Величина моменту, що розвивається асинхронним двигуном, пропорційна квадрату напруги мережі живлення. Тому при перемиканні обмоток статора з «трикутника» на «зірку» внаслідок зниження моменту необхідно виконувати перевірку за перевантажувальною спроможністю і величиною пускового моменту.
Лу 13- 1Д5 ■
1,2- 1,15 ■
1,1 •
1.05 ■
ІЗ*
Секціювання рекомендується коли неможливо скористатися попереднім способом. Якщо двигуни виготовлені з паралельними секціями в статорній обмотці, то секціювання здійснюють шляхом перепайки лобових з’єднань обмотки. Якщо ж обмотка виконана одиночним проводом, то перемикання секцій обмотки можливе лише при капітальному ремонті.
Перемикання відгалуджень знижуючого трансформатора часто застосовують на практиці. Цей захід раціональний, якщо трансформатор не живить одночасно інші приймачі, що не допускають зниження напруги на їх затискачах. Знижуючи напругу мережі живлення, варто пам’ятати, що при цьому зростають втрати й у самій мережі. А в трансформаторах сумарні втрати активної потужності при зміні напруги в більшості випадків не змінюються.
Зниження напруги впливає і на тепловий режим асинхронних двигунів. Так, при номінальному навантаженні і номінальній частоті мережі живлення зниження напруги на 10% призводить до зростання перегріву двигуна також на 10%. Однак варто враховувати, що при завантаженні двигуна, що складає 90%, припустимо знижувати напругу на 13%, а при к3 = 0,8 - напруга може знижуватись на 22%, без небезпеки перегріву двигуна понад припустимий.
На практиці використовують відімкнення частини приводних двигунів при недовантаженні, наприклад, багатодвигунового конвеєра. Але це недоцільно, оскільки через обертання працюючими двигунами непрацюючих приводних блоків втрати потужності майже не зменшуються. А знос редукторів, зв’язаних з непрацюючими двигунами, може бути не менше, ніж у працюючих.
Аналіз показує, що електроприводи великого числа виробничих механізмів мають завищену потужність, що у 1,5-2,5 рази перевищує необхідну. Крім того, електроприводи деяких механізмів (пресів, ковальського устаткування, верстатів) частину часу працюють з недовантаженням.
Зазначені особливості дозволяють знизити електроспожи- вання недовантаженого асинхронного двигуна при роботі в зоні номінальної швидкості, забезпечивши його роботу за рахунок ТРН на регульованій 11х<і/, а не на природній характеристиці, де Ѵх — діюче значення першої гармоніки напруги, прикладене до двигуна; Ѵн — діюче значення номінальної напруги мережі. Цей режим роботи ілюструє рис. 4.16, де цифрою «7» позначена природна, цифрою «2» — регулювальна механічна характеристика при керуванні від ТРН; 5, і $2 — ковзання на природній і регулювальній характеристиках при заданому Мс
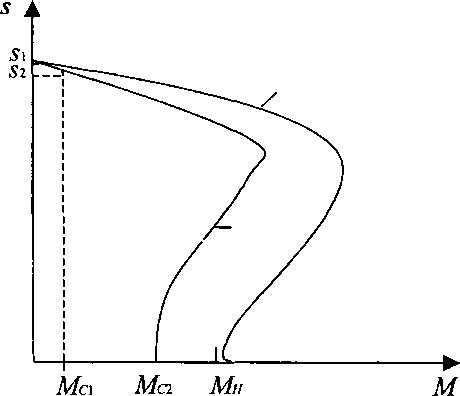
Рис.4.16
Електромагнітні втрати в двигуні:
АР=У + К+Кг
1 2 с]
При роботі на природній характеристиці: ѵ^іа+іХ-а^іѵ^
Ксі=[В + (\-В)ц2с]Кс]И,
де У1н, У2н, Кс1н — номінальні втрати в міді статора, обмотці ро- _мс
т°ра, сталі статора;^ — відносне значення моменту статичного навантаження; А « (/(//„У; /0 — струм неробочого ходу двигуна при живленні номінальною напругою; V— конструктивний ко- еФіцієнт (У=0,96 + 0,98 для двигунів єдиної серії, В — 0,94 н- 0,97 Для двигунів краново-металургійних серій).
При роботі на регулювальній характеристиці 2, реалізованій За Рахунок ТРН,
К=1ДЦс
5 5..
V '
Мн’
ѵ2=и\іс-Гъ>
л:с,=цс[д-+(і-в)-жс1]1.
•*н
При роботі зі зниженою напругою, коли дещо падає
швидкість двигуна, збільшуються втрати Ѵѵ зменшуються втрати Ѵ] і КсѴ але їх перерозподіл такий, що значення ДР при роботі на характеристиці 2 виявляється менше, ніж при роботі на природній характеристиці. Існують методики вибору оптимального значення з2, при якому забезпечується мінімальне значення електромагнітних втрат. У цьому випадку вдається знизити споживання енергії в 1,5 - 2 рази. Економія електроенергії буде тим більше, чим менше момент двигуна в порівнянні з номінальним і чим більше тривалість роботи двигуна з недовантаженням.
Ефект підсилюється при використанні асинхронних двигунів з відносно високим значенням струму неробочого ходу статора. Так, якщо асинхронний двигун МТКР012-6 (Р= 2,2 кВт) забезпечує, працюючи в повторно-короткочасному режимі, 60 включень за годину при часі роботи на сталій швидкості /у=30 с і річному числі годин роботи Т—6000 год/рік, то при роботі на регулювальній характеристиці з ковзанням з2 вдається заощадити за рік 210 кВтЧгод - при Мс~0,5МН,
660 кВтЧгод - при Л/с-0,25Л/н, 1150 кВтЧгод — при М=0,05МИ у порівнянні з роботою на природній характеристиці при 5,.