

23. Регулювання швидкості конвеєрних установок
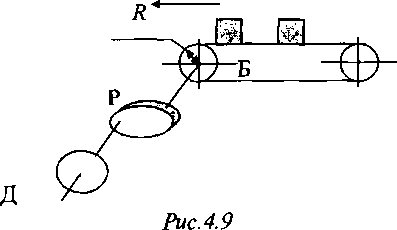
На рис.4.9 зображений стрічковий конвеєр зі стрічкою, що рухається зі швидкістю х. Рух стрічки передається від двигуна Д через редуктор Р і барабан Б.
і)
Момент на валу приводного двигуна конвеєра:
РЯ
*тѵ >
р ‘р
де Я — радіус барабана; Р ~ зусилля на приводному барабані.
Зусилля на барабані має дві складові:
Р = Р« + Рі
0 в’
де Р0 - зусилля, затрачуване на переміщення стрічки конвеєра; Рв - зусилля необхідне для переміщення вантажу.
Коли вантаж на конвеєрі відсутній, двигун розвиває момент неробочого ходу:
^о= —
«До*
дегц - ККД редуктора, що відповідає зусиллю Р0.
З огляду на властивості механічних передач, залежність моменту на валу двигуна від зусилля на барабані
М,=М0.+(і-М0,)і>
де~~ИГ' ~тг; К~ номінальний момент на
^ Н ^ Н вн
валу двигуна необхідний для переміщення стрічки і номінального вантажу при номінальній швидкості; ігвн - складова тягового зусилля Р в органі конвеєра, виникаюча за рахунок переміщення лише номінального корисного вантажу.
Складова тягового зусилля і швидкість переміщення стрічки V конвеєра визначають його продуктивність:
^
£ _ V
де2* - 0Н - номінальна продуктивність конвеєра; - ~р~;
Ун і V— відповідно, номінальна і фактична швидкості руху стрічки.
При постійній номінальній швидкості конвеєра (К = 1):
кутова швидкість на валу двигуна.
Аналіз залежності показує, що коли знижується продуктивність ефективність роботи конвеєра зменшується, оскільки зростає відносна частка потужності, що витрачається на подолання моменту неробочого ходу Л/0. Очевидно, що при недовантаженні конвеєра більш економічним по витратах енергії є режим роботи зі змінною швидкістю, що забезпечує ту саму продуктивність, але при сталості складової зусилля Рв. = 1. Відповідно до 0* = РЪ.ѴЩ швидкість у цьому випадку повинна змінюватися за законом:
На рис.4.10 показані залежності потужності на валу двигуна для конвеєра з моментом неробочого ходу Л/0 = 0,3 Мн для постійної (^=соп5і) і регульованої (/^сопзі) швидкостей стрічки.
![]()
потужність, що розвивається двигуном на валу: Р* - М,со, - М0, + (і - М0. ,
![]()
;со, = — = 1;со =
со,
<о
н
![]()
; Р, со — номінальна потужність і
со.= К=<2*,
якому відповідає потужність на валу двигуна
К=М. со, = [м0. + (і - М0. )]0, = а-
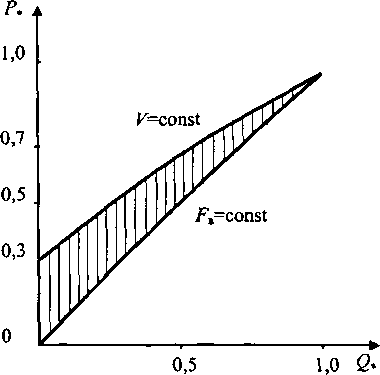
Рис.4.10
Заштрихована зона відповідає економії потужності, одержуваній за рахунок регулювання швидкості
АР.=Л-Я=М0.(і-Є.>
Таким чином, ефект від регулювання швидкості тим вище, чим більший момент неробочого ходу і чим значніше знижується продуктивність конвеєра.
2.4. Регулювання швидкості вантажопідйомних машин
Для механізмів вантажопідйомних машин (кранів, ліфтів) застосовуються різні системи асинхронного привода, які можна поділити на дві групи. Перша реалізується на основі релейно- контакторної апаратури з використанням реостатного регулювання, динамічного гальмування, багатошвидкісних двигунів тощо. Друга група виконується з напівпровідниковими пристроями: з перетворювачами напруги, частоти, імпульсними регуляторами. Для кранів і ліфтів масового призначення дотепер в основному знаходять застосування системи електроприводів першої групи, у яких відсутні керовані напівпровідникові пере
творювачі. Однак релейно-контакторні системи керування часто не забезпечують бажаних енергетичних показників і якості регулювання координат в електроприводах розглянутого класу. Хому є потреба розробки більш досконалих електроприводів другої групи.
Вибір системи електропривода для даних механізмів залежить від вартості, масогабаритних, енергетичних показників, надійності устаткування й істотно визначається умовами і рівнем експлуатації. Оскільки вантажопідйомні машини мають масове застосування, то для них часто вимагаються максимально прості й дешеві електроприводи, що мали б за можливості просте схемне виконання і разом з тим необхідні технічні показники. Однією з таких систем є система перетворювач напруги — асинхронний двигун.
Приводні двигуни кранових і ліфтових механізмів працюють у повторно-короткочасному режимі. При цьому основну частину робочого часу (60-70% і більше) приводний двигун обертається з високою частотою близькою до номінальної і приблизно до 15% - зі зниженою частотою. У процесі роботи на високій частоті АД найкраще підключати безпосередньо до мережі. Отже, протягом більшої частини робочого часу між мережею живлення і статором АД ніякий перетворювач не потрібний. Протягом же невеликої частини робочого часу керований перетворювач електричної енергії необхідний як для забезпечення зниженої частоти обертання ротора, так і для належного формування перехідних процесів пуску і гальмування.
Як керований перетворювач найкраще підходить ПЧ, оскільки він забезпечує вищу якість регулювання координат АД (швидкість, момент, струм). При роботі на високій швидкості більше підходить ТРН, тому що при нульовому куті керування тиристори повністю відкриті, і мережа не завантажується вищими гармоніками. У випадку ж використання ПЧ при роботі на високій швидкості (і номінальній частоті) виникають певні проблеми, пов’язані або з відомими труднощами щодо забезпечення генераторного режиму з рекуперацією енергії в мережу (такий режим є характерною рисою для розглянутого класу механізмів) за наявності інвертора напруги, або з погіршенням коефіцієнта потужності при наявності інвертора струму.
Основним режимом роботи системи ТРН-АД є фазовий. Дослідження показують, що технічні можливості цієї системи можна значно розширити за рахунок спеціальних режимів АД: квазі- частотного і крокового.
При здійсненні квазічастотного керування частоти значимих гармонік виражаються у вигляді:
у _ /„і К +ІМі +Л2О2 + 1і)Я2
(щ+Ояі+(щ+^)я2
ДЄ
/„1 =/м
т 1—*-
К
;/л2=/«
Гт (т2+/2)
7ут: /я,, /,, т2, Іѵ д2 — параметри квазічастотного керування;
^ - частота мережі; /т — мінімальний час такту перемикання; к2 = 0,1,2,...-цілі числа, що задовольняють нерівності, Гм — період мережі:
к\Я\ +Мг ^2[(ш, + /,)?і +(т2 +/2)92]^г-
М
Частоту/п значимої гармоніки напруги можна наблизити до будь-якої заданої частоти в зоні між^, \/п2. Отже, змінивши параметри квазичастотного керування, можна здійснити в широкому діапазоні плавне регулювання частоти значимої гармоніки.
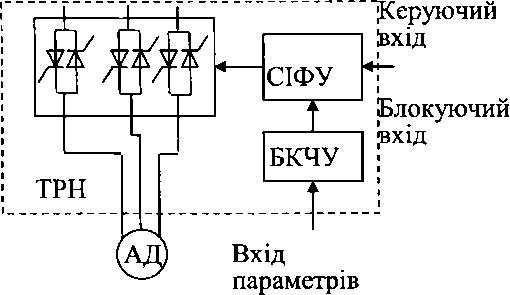
Рис А11
На рис. 4.11 наведена схема керування АД, у якій забезпечується як квазічастотний, так і фазовий режими керування. Система
імпульсно-фазового керування СІФУ має два входи: вхід керування і релейний вхід блокування, до якого приєднаний блок квазі- частотного керування БКЧУ. При зміні і/ здійснюється регулювання амплітуд значимих гармонік напруги на статорі АД, а при зміні параметрів квазичастотного керування — регулювання частоти цих гармонік.
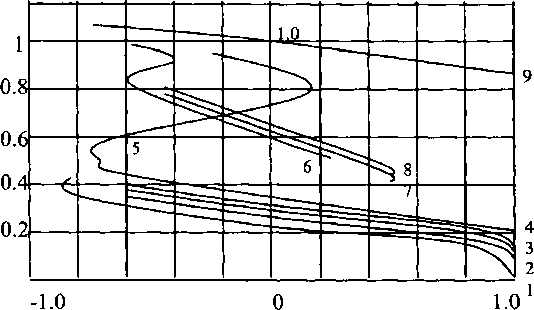
На рис. 4.12 зображені два сімейства експериментальних механічних характеристик 1-5 і 6-8, що отримані при здійсненні зазначеного способу. Нарисунку: 1-т=2, /,=6; 2- /я,=2, /,=6, <7,=3, т= 3, 1=6, <?2=1; 3 - т~ 2, 1=6, ?=1, 3, 1=6, ?=1; 4- т = 2,
/,=6, <7,=1, /и2=3, /2=6, #2=3; 5— т2=3,1 = 6; 6— /я,=4, /,=12; 7—т = 4, /,=12, #,=2, т2=5, /2=12, #2=1; т2=5, /2=12; 9- природна харак
теристика.
оУссь
м/мн
Рис. 4.12
У кожному з цих сімейств механічні характеристики розташовані близько одна до одної, що говорить про високу плавність регулювання швидкості.
Квазичастотне керування має такі переваги: забезпечення стабільної зниженої швидкості в розімкнутій системі керування, регулювання моменту в широкому діапазоні з плавним переходом з Рушійного режиму АД в гальмівний, здійснення електричного гальмування у визначеній зоні швидкостей.
Крім переваг таке керування має і недоліки: труднощі забезпечення гальмування поблизу синхронної швидкості, а також наявність шуму і вібрацій АД. Останній недолік є найбільш істотним.
Разом з тим, квазичастотне керування становить значний інтерес для віброприводів, у яких робочий орган робить коливальний рух. Квазічастотний режим становить інтерес і як спеціальний режим роботи електропривода, виконаного за системою ТРН-АД. Раціональне поєднання квазічастотного, крокового і фазового режимів значно розширює функціональні можливості цієї системи. На базі системи ТРН-АД розроблені електроприводи механізму пересування однобалкових мостових кранів і тельферів.
Значний інтерес становить використання ТРН для керування низькошвидкісними лінійними асинхронними двигунами (ЛАД), що, на відміну від АД, мають ряд особливостей. Через підвищений повітряний зазор у ЛАД великий намагнічувальний струм, а струм індуктора мало залежить від швидкості (ковзання). Тому електричні втрати в первинних обмотках ЛАД при живленні від ПЧ чи ТРН не так різко відрізняються між собою, як у АД. Також через підвищений повітряний зазор швидше згасають електромагнітні перехідні процеси, і має місце більш висока стійкість роботи електропривода в замкнутих системах регулювання. У системах ТРН-ЛАД при фазовому керуванні зі зворотним зв’язком по швидкості забезпечується без коригувальних пристроїв регулювання в діапазоні до (150-200): 1, а при квазічастотному - керуванні в розімкнутій системі регулювання швидкості здійснюється в діапазоні (10-15): 1 і вище при плавному переході з рушійного режиму в гальмівний. Система ТРН-ЛАД, зокрема, може бути використана для реалізації безредукторного електропривода кабіни ліфта.
З ВИБІР РАЦІОНАЛЬНОГО СПОСОБУ РЕГУЛЮВАННЯ ШВИДКОСТІ ЗАЛЕЖНО ВІД ХАРАКТЕРУ ЗМІНИ НАВАНТАЖЕННЯ