

5. Енергетичні характеристики регульованих електроприводів у статичному режимі
5.1 Регульований електропривід Із ДПС незалежного збудження
При визначенні енергетичних показників регульованих приводів необхідно враховувати, що:
• зміна швидкості двигуна викликає зміну постійних втрат у двигуні. Особливо істотно постійні втрати змінюються при регулюванні струму збудження ДПС;
• наявність силового перетворювача викликає додаткові втрати потужності в перетворювачі і двигуні;
• перетворювач є споживачем реактивної потужності і вносить спотворення в синусоїдальну форму кривої напруги і струму.
За критерієм втрат потужності способи регулювання швидкості можуть бути економічними (характеризуються малими втратами) і неекономічними. До економічних належить регулювання швидкості ДПС за допомогою керованих перетворювачів.
Постійні втрати ДПС:
К = К +К с мн
' * (0
со
+ К
з-
Змінні втрати в якірному колі:
ѵ=/\=м(р0г-<о),
де — швидкість ідеального неробочого ходу при роботі дви
гуна на регулювальній (штучній) характеристиці.
При регулюванні швидкості реостатним способом змінні втрати зростуть пропорційно відносному перепаду швидкості:
со0 — со
![]()
Сумарні втрати:
АР = К+К,
![]()
+ ЛТ3 +Л/(о0р -со)
МН
![]()
При регулюванні швидкості за допомогою перетворювача необхідно враховувати втрати в перетворювачі. Постійні втрати Кп визначаються втратами в сталі силового трансформатора і реакторів. Змінні втрати перетворювача визначаються втратами в міді обмоток трансформатора реактора і вентилів:
де Іх, /2 -первинний і вторинний струми трансформатора. При регулюванні швидкості ДПС зміною струму збудження змінюються постійні втрати від струму збудження і втрати в сталі:
Зі зменшенням швидкості збільшення втрат у сталі компенсується зменшенням механічних втрат, тому постійні втрати майже не змінюються.
Змінні втрати потужності:
При частотному способі регулювання швидкості АД робоче ковзання двигуна невелике у всьому діапазоні регулювання. Тоді
![]()
![]()
5.2. Регульований електропривід з АД
При реостатному регулюванні втрати в сталі:
![]()
V = ѴХ + Ѵ2 +
втратами в сталі ротора через малу частоту можна знехтувати і при и __
законі регулювання —-соп8І:
/і
(г Т3
■
Експериментальні дослідження показали, що при живленні АД від перетворювача частоти з несинусощальною формою напруги виникають додаткові втрати, що впливають на нагрівання, припустиме навантаження, робочі й інші характеристики двигунів. Так при/= 50 Гц втрати в сталі статора підвищуються на 30 %, струм неробочого ходу - на 32%, ККД знижується на 1,5%, коефіцієнт потужності — на 0,05, струм в обмотці статора в робочому режимі збільшується на 8%, а ковзання — на 3%. На рис.2.35 показано рекомендоване заводом ХЕМЗ гранично припустиме навантаження двигуна.
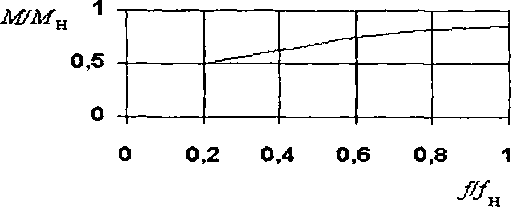
Рис. 2.35
Видно, що в номінальному режимі двигун розвиває потужність на і 5% меншу, ніж при живленні від мережі із синусоїдальною формою напруги. При частоті 10 Гц момент, що розвивається двигуном, складає половину від номінального, а потужність, що розвивається ним, - 10% від номінальної. ККД складає лише 72% від ККД при/=50 Гц. Відбувається також зниження максимального моменту на 10...20% приґ>25 Гц.
6. ЕНЕРГЕТИЧНІ ХАРАКТЕРИСТИКИ МЕХАНІЧНИХ ПЕРЕТВОРЮВАЧІВ У СТАТИЧНИХ
РЕЖИМАХ
Втрати енергії в механічній частині електропривода пов’язані з наявністю тертя між елементами, які взаємно переміщуються, передатних і виконавчих механізмів. Є два типи тертя:
• ковзання;
• кочення.
Тертя ковзання обумовлене взаємодією нерівностей елементів, які ковзають один відносно одного в механізмах (рис.2.36).
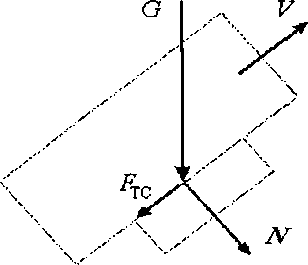
Рис. 2.36
Сили тертя, що виникають як реакція на взаємний рух, залежать від матеріалів взаємодіючих деталей і сили, що діє перпендикулярно лінії взаємодії - сили нормального тиску N. Тертя ковзання характерне для підшипників ковзання, направляючих ліфтових установок тощо. Коефіцієнт тертя ковзання:
![]()
де Ргс тѴ— відповідно сили тертя ковзання і нормального тиску. Тертя кочення виникає при коченні круглих тіл по поверхнях. При цьому виникає сила дотична до твірної тіла, що котиться, яка визначає момент опору щодо осі обертання (рис. 2.37).
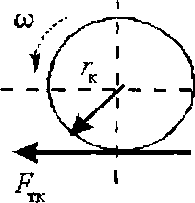
Рис. 2.37
Тертя кочення виникає в підшипниках кочення, у механізмах переміщення на колісному ходу, кулькових, роликових опорах. Величиною, що характеризує опір при коченні, є момент тертя щодо осі обертання тіла, яке котиться. Діаметр тіла, що котиться, (плече моменту тертя кочення) при даній силі визначає момент - чим більше плече, тим більший момент. З іншого боку, при більшому діаметрі менша крутизна зминання, шо перешкоджає коченню. Тому момент тертя залежить у першому наближенні лише від матеріалів взаємодіючих тіл і нормального тиску їх один на одного.
Коефіцієнт тертя кочення:
Г ^ м
Лк м , м,
де Мтк— момент тертя кочення (Л/тк= ^тк^тк).
Зазначені сили, що викликані тертям, визначають втрати енергії при взаємному переміщенні дотичних деталей механізму, при цьому втрати потужності залежать також від відносної швидкості взаємного переміщення:
АР = РТСГ>
АР = Мп(ґ>\
де^ѵ — відносні лінійна і кутова швидкості поверхонь тертя.
У будь-якому механізмі, навіть за відсутності передачі або перетворення енергії, діють внутрішні сили (сила ваги, сила конструктивних з’єднань деталей тощо), тому тертя і втрати енергії виникають і при неробочому русі механізмів. При передачі і перетворенні енергії нормальні зусилля зростають і, отже, збільшують
ся відповідні сили і моменти тертя, втрати. Тому моменти тертя можна відобразити лінійною залежністю від корисних моментів:
11
Для даного класу механізмів конструктори-механіки задають залежність ККД від навантаження, за допомогою якої визначаються значення Л/кор. Номінальні значення ККД деяких механічних передач наведені в табл. 2.3.
Таблиця 2.3
Вид передачі |
Тип передачі |
ККД |
|
Зубчасті колеса на підшипниках кочення |
Закрита з рідким мастилом |
Циліндрична |
0,97 + 0,99 |
Конічна |
0,96 -ь 0,98 |
||
Відкрита з консистентним змащенням |
Циліндрична |
0,95 + 0,97 |
|
Конічна |
0,94-0,95 |
||