

4.2. Коефіцієнт корисної дії електропривода
Витрачена енергія відрізняється від корисної на величину втрат. Потужність втрат енергії містить постійну і змінну складові. Постійна складова не залежить від навантаження (корисної потужності), змінна -пропорційна корисній потужності в степені більше 1.
Коефіцієнт корисної дії електромеханічного перетворювача є відношенням повної механічної потужності на валу до потужності, споживаної з мережі. Приймемо, що при роботі на природній ха-
V- 1 - р
рактеристиці Л ~ у - у, тоді ККД:
*и * II
Залежність ККД від кратності навантаження має максимум при:
ках;Х*' “ - час циклу.
Р _ Р
Т) =
Р Р+АР
![]()
X
У номінальному режимі Х=1:
![]()
![]()
Максимальне значення ККД:
1
![]()
На рис. 2.32 зображена залежність коефіцієнта корисної дії від потужності.
Значення ККД, що відповідають робочому діапазону, знаходяться в межах О...Ря. Не випадково номінальне значення навантаження (потужності) вибирається при ті < цтах. Пояснюється це тим, що практично всі пристрої працюють у режимах зі змінним у часі рівнем навантаження. Крім того, при розрахунку електромашин передбачаються накопичення по потужності. Це призводить до того, що фактичне навантаження пристроїв виявляється меншим номінального. Взагалі значення ККД вище.
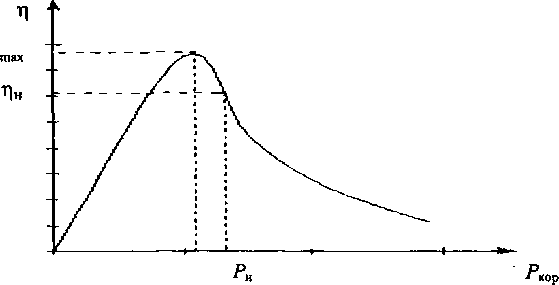
Рис. 2.32
Зазначене співвідношення між максимальним і номінальним значеннями ККД сприяє підвищенню ККД циклу, оскільки миттєві значення зосереджуються біля максимуму. З огляду на те, що реально навантаження асинхронних двигунів знаходяться в області (0,6...0,7)Рн, розробники масової серії двигунів 4А найбільший розрахунковий ККД розташували саме біля цих значень. Залежність номінального ККД асинхронних двигунів від номінальної потужності показана на рис. 2.33 (1 - АД серії А2; 2 — АД серії А4 (\ѵ0 =157 і 107 сек-'); З - АД серії А4 (дѵО =314 с1))-
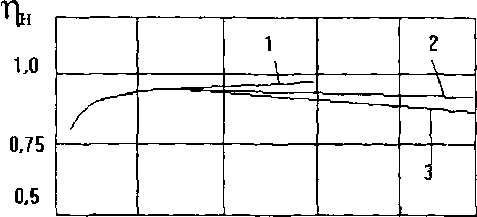
0 50 100 150 200 р к^г
Рис. 2,33
Якщо привод постійно працює зі сталим навантаженням то вигідніше, щоб при цьому ККД був максимальним. У цьому випадку доцільно спеціально проектувати елементи силового кола з малими питомими втратами (меншими густиною струмів, індукцій, коефіцієнтами тертя в механічній частині), із застосуванням високоякісних матеріалів. Додаткові витрати на матеріали окупляться меншими втратами енергії й у підсумку — меншими сумарними витратами.
Найбільше значення ККД двигунів знаходиться в області номінального навантаження. Тому для зменшення втрат потужності необхідно забезпечити повне навантаження й обмежити їх неробочий хід. При наявності малозавантажених двигунів доцільно зробити їх заміну на двигуни менших габаритів.
4.5. Коефіцієнт потужності електропривода
Електропривод змінного струму споживає з мережі активну Р и реактивну <2 потужності. Активна потужність витрачається на здійснення електроприводом корисної роботи і покриття втрат у ньому, а реактивна забезпечує створення обертального магнітного поля двигуна і безпосередньо корисної роботи не виконує.
Коефіцієнт потужності електропривода:
Р Р
С08О = — = ■■ ■■
де 5— повна споживана потужність.
Куті визначає зсув фаз між напругою мережі і струмом електропривода. Електропривод, споживаючи реактивну потужність, додатково навантажує систему електропостачання, викликаючи додаткові втрати напруги й енергії в її елементах.
Якщо електропривод працює в якомусь циклі при різних навантаженнях чи швидкостях, то він як споживач електричної енергії характеризується середньозваженим чи цикловим коефіцієнтом потужності, що визначається відношенням спожитої активної енергії за цикл \Ѵа до повного IV:
Для більшості АДсозфн~ 0,8+0,9. Для цих значень £)=(0,5+0,75).Р, тобто АД на кожен кіловат активної потужності споживає з мережі 0,5...0,75 квар реактивної потужності. Чим нижче созф, тим більшу реактивну потужність споживає АД з мережі, завантажуючи її додатковим струмом і викликаючи в ній додаткові втрати.
Коефіцієнт потужності АД істотно залежить від його навантаження. При неробочому ході АД коефіцієнт невеликий, оскільки відносно велика частка реактивної потужності в порівнянні з активною. Збільшуючи навантаження АД зростає і созф, досягаючи свого максимального значення приблизно в області номінального навантаження. Залежність созф від кратності механічного навантаження для АД серії 4А при різних рівнях номінальних созфн зображена на рис. 2.34 (1 — со$ф=0,9; 2 — созф = 0,8; 3 ~ созф = 0,7).
п
со$ф = - —
IV
![]()
Активна і реактивна потужності АД:
Р=Л/а>0+3/^;
е=3/£хц+3/2^+3(Г2)2х^
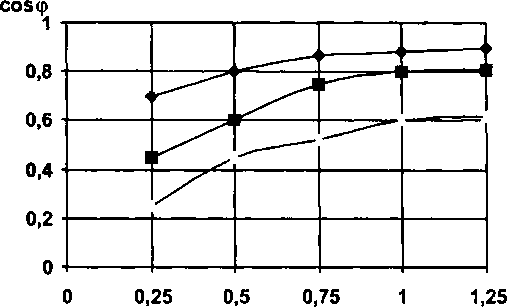
Р/Рп
Рис. 2.34
Асинхронні двигуни є основними споживачами реактивної потужності в системі електропостачання.
Для зниження споживання АД реактивної потужності і тим самим підвищення коефіцієнта потужності необхідно виконати таке:
• замінити малозавантажений АД двигуном меншої потужності. При заміні АД меншої потужності буде працювати в області великих навантажень з вищим со$<р. Крім того ККД цілком завантаженого двигуна буде високим;
• знизити напругу в АД, що працює з малим завантаженням. При цьому зменшуються споживаний з мережі струм і реактивна потужність, та підвищується С05ф. Реалізується це за допомогою регулятора напруги, перемиканням обмотки статора зі схеми трикутника на зірку, що призводить до зниження напруги на обмотці
кожної фази в^Уз раз;
• обмеження неробочого ходу АД;
• застосування СД замість АД;
• використання компенсаційних пристроїв у вигляді конденсаторів.