

1.2. Пример расчета модального регулятора
Рассмотрим задачу синтеза обратной связи для системы управления электроприводом перемещения. Пусть упрощенная линейная модель разомкнутой системы управления описывается дифференциальным уравнением вида
![]()
где: Т – постоянная времени привода, учитывающая его инерционность; к – общий статический коэффициент передачи канала управления; и – соответственно угол поворота и угловая скорость электродвигателя; u - управляющий сигнал (напряжение управляемого источника питания).
Переходя к изображениям по Лапласу, получим
![]()
где к1к2 = к. Представим объект управления структурной схемой в виде последовательного соединения апериодического и интегрирующего звеньев рис.1.1.

Рис.1.1
Уравнения объекта в скалярной форме будут иметь вид
![]()
Здесь
![]() - переменная состояния, пропорциональная
углу поворота электропривода;
- переменная состояния, пропорциональная
углу поворота электропривода;
![]() - переменная состояния, пропорциональная
угловой скорости электропривода.
- переменная состояния, пропорциональная
угловой скорости электропривода.
Уравнение объекта в векторно-матричной форме согласно (1.1)
![]()
Отсюда находим


![]()
Корни характеристического уравнения
разомкнутой системы
![]() следовательно, объект управления
является нейтральным. Для обеспечения
заданного перемещения введем линейные
обратные связи по углу и угловой скорости
следовательно, объект управления
является нейтральным. Для обеспечения
заданного перемещения введем линейные
обратные связи по углу и угловой скорости
u(t) = – l1 x1(t) – l2 x2(t) + k0 g(t),
где g – задаваемое значение перемещения.
Тогда замкнутая система с модальным управлением будет иметь вид, показанный на рис.1.2.

Рис.1.2
Она описывается дифференциальными уравнениями в скалярной форме
![]() (1.7)
(1.7)
Коэффициент усиления предварительного усилителя К0 найдем из условия обеспечения установившегося перемещения (заданного), т.е. y=x1=g. При этом
![]()
Тогда из уравнения (1.7) получим К0 = l1.
Характеристическое уравнение замкнутой САУ с неизвестными параметрами li модального регулятора найдем из уравнения (1.7)
 (1.8)
(1.8)
Если для САУ второго порядка принять коэффициенты желаемого характеристического уравнения (1.7) в соответствии с распределением Баттерворта, т. е.
D(p) = p2 +1,4 p + 2 = 0 и tp =3/, (1.9)
то предварительно задавшись требуемым временем переходного процесса tp, приравнивая коэффициенты при одинаковых степенях оператора р в уравнениях (1.8) и (1.9), получим следующие коэффициенты обратных связей (модального регулятора):
![]()
![]() (1.10)
(1.10)
Если для САУ второго порядка принять коэффициенты желаемого характеристического уравнения (1.7) в соответствии с биномиальным распределением , т. е.
D(p) = p2 +2 p + 2 = 0 и tp 3/, (1.11)
то предварительно задавшись требуемым временем переходного процесса tp, приравнивая коэффициенты при одинаковых степенях оператора р в уравнениях (1.8) и (1.11), получим следующие коэффициенты обратных связей (модального регулятора):
![]() (1.12)
(1.12)
Для приведенной САУ модального управления примем следующие значения параметров: T=0,2 c.; k1=10; k2=0,1; tp=0,3 c. Тогда коэффициенты обратных связей модального регулятора, рассчитанные по формулам (1.10) и (1.12), будут иметь значения:
- для биномиального распределения - l1= 20; l2= 0,3;
- для распределения Баттерворта - l1= 20; l2= 0,18.

Рис.1.3
На рис.1.3 приведена схема модели системы управления с модальным регулятором, настроенным на распределение Баттерворта.
На рис. 1.4 приведены результаты моделирования САУ с модальным управлением в среде пакета прикладных программ SyAn. На графиках приведены переходные процессы при g(t) = 1 для биномиального распределения (рис.1.4,а) и для распределения Баттерворта (рис.1.4,б).
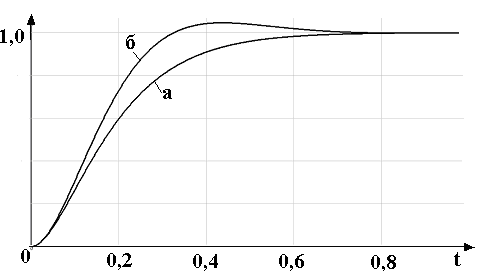
Рис.1.4
При использовании распределения Баттерворта время переходного процесса меньше, чем при использовании биномиальной настройки, но в тоже время появляется перерегулирование. При использовании биномиальной стандартной настройки и стандартного распределения Баттерворта ошибка системы регулирования с нейтральным объектом стремится к нулю. В обоих случаях быстродействие выше, чем при классических оптимальных настройках регуляторов (модульной и симметричной).