

Глава 2 Циклические Ускорители с постоянным во времени магнитным полем
Как было ранее установлено, энергия частиц ускорителей прямого действия ограничена. Предельная величина электрического напряжения, которое может быть получено на таком ускорителе, определяется электрической прочностью трубки и ряда изолирующих промежутков. Считается целесообразным не повышать это предельное напряжение свыше (5…6)∙106 в. Дальнейшее повышение напряжения связано с большими техническими трудностями и чрезмерными затратами. Применение ускорителей сдвоенного типа позволяет увеличить энергию частиц в два и три раза. Однако при этом резко снижается интенсивность пучка ускоренных частиц.
Поворот пучка и ускорение частиц в циклическом ускорителе
Физика требует от ускорительной техники создания машин на значительно большие энергии, чем 10…15 Мэв. Одним из самых удобных способов разгона заряженных частиц до больших энергий, при ограниченном напряжении в пространстве, где происходит ускорение, является многократное прохождение одних и тех же частиц через это пространство. Такой принцип положен в основу действия так называемых циклических ускорителей. В ускорителях частицы движутся по некоторой криволинейной траектории, обеспечивающей многократное прохождение частиц через один или несколько ускоряющих промежутков. Может возникнуть мысль о том, что возможно, искривив траекторию движения частиц, многократно пропустить их через ускоряющую трубку ускорителя прямого действия так, как показано на рис. 34. Однако такая схема не дает нужного эффекта.
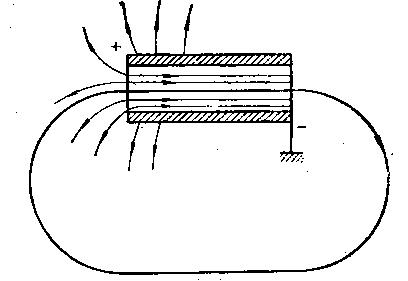
Рис.34. Схема электрического поля ускорительной трубки при многократном
пропускании через нее частицы
Частицы, вышедшие из прямого заземленного конца трубки и вернувшиеся в трубку слева, встретят при подходе к трубке электрическое поле, направленное в сторону, обратную направлению движения частиц. Не дойдя до левого отверстия трубки, они потеряют всю свою энергию, приобретенную внутри трубки при первом цикле ускорения.
Такая схема, следовательно, непригодна для использования в циклических ускорителях. Необходимо, чтобы внешнее поле отсутствовало.
Одна из возможных схем ускоряющего устройства представлена на рис. 35.
Здесь А и В — две ускоряющие трубки, соединенные последовательно, С — металлическая проводящая трубка необходимой длины. Правый и левый концы трубок заземлены. Таким образом, при подходе к трубке частица не встречает никакого электрического поля. В верхней части рисунка показан момент, когда частица вошла в трубку А. Металлическая трубка С имеет отрицательный потенциал. Электрическое поле направлено в сторону движения частицы, и частица ускоряется.
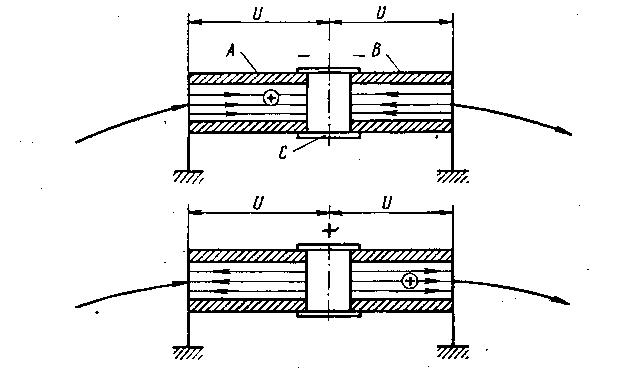
Рис. 35. Схема, при которой возможно ускорение частицы, многократно проходящей через ускорительное устройство
При постоянном значении напряжения U частица, пройдя промежуток С и войдя в трубку В, встретит поле, направленное влево, и будет тормозиться. Дойдя до правого конца трубки В, она полностью потеряет всю ту энергию, которую она накопила в трубке А. Поэтому нужно, чтобы за то время, в течение которого частица находится внутри металлической трубки С, в пространстве, лишенном электрического поля, потенциал трубки С сменил знак на обратный, при этом трубка С получила бы положительный заряд, и частица, войдя в ускорительную трубку В, была бы вновь ускорена (см. рис. 35 внизу). При многократном прохождении частицы через ускоряющие устройства нет необходимости иметь очень большое электрическое напряжение порядка миллионов вольт. Многократно проходя через это устройство даже при сравнительно низком напряжении — порядка нескольких киловольт, частица может набрать нужную энергию. Поэтому, нет надобности, выполнять ускоряющие устройства в виде сложных трубок с фарфоровыми кольцами и электродами, как делается в ускорителях прямого действия.
Еще более простое ускоряющее устройство схематически показано на рис. 36.
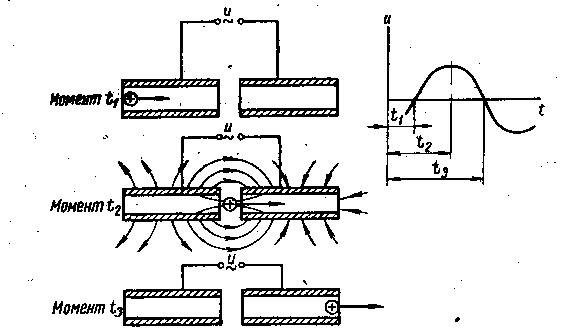
Рис. 36. Простейшее ускорительное устройство с питанием его переменным электрическим напряжением
Оно состоит из двух металлических проводящих трубок, присоединенных к источнику переменного напряжения U. Частица, пришедшая к ускоряющему устройству слева в момент t1 когда мгновенное значение U равно нулю, беспрепятственно войдет в левую трубку. В течение времени, пока частица движется в левой трубке в пространстве без электрического поля напряжение растет, и в момент t2 при максимальном или близким к нему значении напряжения частица пройдет пространство между двумя трубками, в котором имеется электрическое поле. Пройдя этот промежуток, частица получит прирост энергии в электронвольтах, численно равный напряжению, соответствующему моменту t2. Частица должна выходить из правой трубки в момент t3, когда напряжение равно нулю и никакого тормозящего поля вблизи трубки нет.
На рис. 35 и 36 приведены схемы двух возможных вариантов ускорения при многократном прохождении частицы через ускоряющее устройство. Эти варианты не исчерпывают всех возможных схем ускоряющих устройств. Однако все они должны обязательно работать при переменном электрическом напряжении и, очевидно, при весьма высокой частоте, определяемой размерами ускоряющих устройств и большой скоростью прохождения частиц через эти устройства.
Второй особенностью циклических ускорителей являются криволинейные траектории движения частиц, обеспечивающие возврат их к ускоряющим устройствам. Для получения криволинейной траектории необходимо наличие силы, действующей на частицу в направлении, перпендикулярном к касательной к траектории. Существуют три вида сил, которые могут воздействовать на движущуюся частицу и обеспечить криволинейность траектории ее движения. Это гравитационные силы, силы, создаваемые электрическим полем, и силы, вызванные взаимодействием движущейся частицы с магнитным полем.
Гравитационные силы должны быть сразу отвергнуты как непригодные для воздействия на заряженную частицу. Известно, что уже при cкорости свыше 11,2 км/с движущееся тело покидает пределы Земли. Скорости, с которыми имеют дело в ускорителях, на много порядков больше, чем эта так называемая космическая скорость. Гравитационные силы весьма малы, чтобы их можно было использовать для создания криволинейных траекторий в циклическом ускорителе.
Силы электрического поля, в принципе, могут быть использованы для осуществления замкнутых криволинейных траекторий.
Очевидно, реально осуществимое значение электрического поля может быть порядка 50 кв/см. При этом значении электрического поля для протонов при малых энергиях радиус круговой траектории для протонов с энергией порядка 10 ГэВ составит около 2 км.
Есть и второе обстоятельство, препятствующее использованию электрического поля. Пространство, в котором движутся частицы в циклическом ускорителе, должно иметь достаточный объем. Частицы, двигаясь вдоль вакуумной камеры, совершают колебания в радиальном направлении. Чтобы при этом частица не потерялась на стенках камеры, радиальный размер ее должен быть значительным — порядка нескольких десятков сантиметров. При напряженности электрического поля, принятой нами в этом примерном расчете, Е = 50 кв/см и при расстоянии между электродом 10 см нужно иметь весьма большое напряжение U = 500 кв.
На рис. 37 схематически показана возможная система циклического ускорителя с электрическим полем.
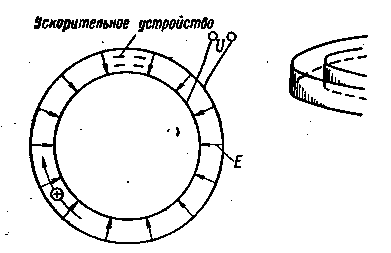
Рис. 37. Система циклического ускорителя с электрическим полем
Здесь движение частицы происходит по кольцевой траектории между двумя обкладками цилиндрического конденсатора. Электрическое поле с напряженностью Е направлено радиально. В одной или нескольких точках этой траектории размещено ускоряющее устройство, выполненное по одной из ранее рассмотренных схем.
Из-за необходимости применять очень высокое напряжение и вследствие больших размеров сооружения электростатический способ отклонения частиц в циклических ускорителях не используется. Он находит применение лишь в некоторых вспомогательных устройствах таких ускорителей.
Частица в постоянном магнитном поле движется по круговой траектории. Для нашего примера радиус кривизны траектории при магнитном отклонении частицы почти в 100 раз меньше, чем при электростатическом. Электромагнитный метод отклонения частицы является наилучшим из возможных и используется во всех циклических ускорителях.
Частица с неизменной энергией w в постоянном магнитном поле, вектор напряженности которого, перпендикулярен плоскости орбиты, движется по круговой траектории. Здесь центробежная сила

уравновешивается силой Лоренца
![]() .
.
Если магнитное поле равномерное, а скорость частицы постоянна (постоянная энергия w), то лоренцева сила будет постоянной и не зависящей от радиуса орбиты. Центробежная сила обратно пропорциональна радиусу кривизны траектории. При постоянной массе частицы и постоянной скорости ее вращения, мы будем иметь гиперболическую зависимость центробежной силы от радиуса (кривая Рс на рис. 38а).
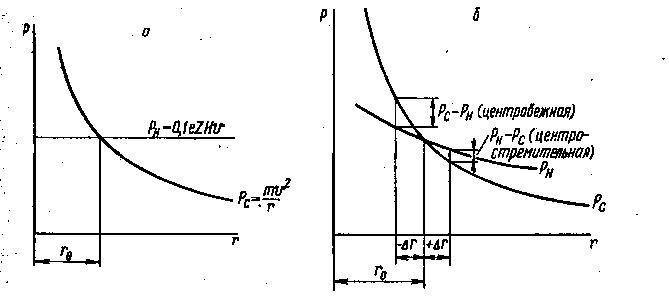
Рис. 38. Зависимость центробежной силы и силы Лоренца от радиуса вращения частицы в магнитном поле при равномерном а и подающем б магнитном поле
В действительности в ускорителях напряженность магнитного поля не остается постоянной при различных радиусах, а несколько падает с увеличением радиуса. Поэтому кривые лоренцевой силы и центробежной силы в зависимости от радиуса будут выглядеть так, как показано на рис. 38б.
Из рис. 38 видно, что равенство двух противоположно направленных сил имеет место только при каком-то определенном значении радиуса r0. При всех других значениях силы не равны. Радиус, соответствующий точке равенства сил, носит название радиуса равновесной орбиты. Во всех точках этой орбиты соблюдается условие равновесия двух сил и частица при случайном отклонении ее траектории от равновесной орбиты стремится возвратиться обратно на эту орбиту. Так, при переходе на орбиту большего радиуса, равного г0 + Δr, (см. рис. 38) лоренцева сила станет большей, чем центробежная, и на частицу будет действовать суммарная центростремительная сила
![]() .
.
При отклонении частицы от равновесной орбиты в сторону меньшего, радиуса г0 - Δr центробежная сила станет большей, чем центростремительная сила Лоренца, и суммарная сила будет центробежной. Таким образом, всякое изменение радиуса траектории частицы приведет к появлению силы, стремящейся возвратить частицу на равновесную орбиту. Сила, возвращающая частицу на равновесную орбиту, возрастает с увеличением Δr. Это создает устойчивость ее движения в радиальном направлении.
Так как частицы в ускорителях движутся в вакууме, то трение, препятствующее их движению (если пренебречь излучением для электронов), отсутствует, и частицы совершают гармонические колебания около равновесной орбиты (рис. 39).
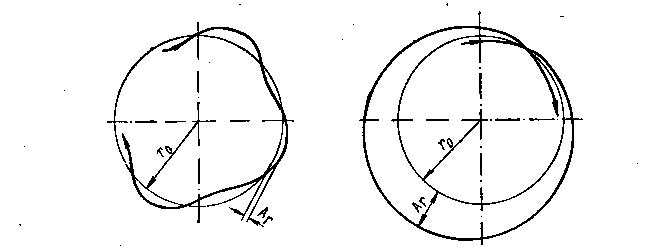
Рис. 39. Радиальные свободные колебания частицы вокруг круговой равновесной орбиты
Амплитуда радиальных колебаний Δr зависит от величины силы, отклонившей частицу от равновесной орбиты. При большом количестве частиц каждая из них совершает колебания независимо от других, поэтому вокруг равновесной орбиты появится целая область, в которой будут находиться частицы.
Таким образом, движение частицы в равномерном (однородном) магнитном поле будет устойчивым в радиальном направлении. При равномерном магнитом поле частицы могут свободно перемещаться вдоль силовых линий магнитного поля до тех пор, пока не соприкоснутся с поверхностью полюса магнита и не выпадут из режима ускорения. Силы, которые заставят частицу двигаться вертикально вдоль силовой линии магнитного поля, могут быть различными. Это тепловые скорости частицы, случайное возмущение, например, столкновения с молекулами газа, некоторая начальная неперпендикулярность вектора скорости частицы к вектору напряженности магнитного поля и, наконец, сила тяжести. При достаточно продолжительном пребывании частицы на орбите она просто упадет на нижний полюс магнита. Поэтому для обеспечения вертикальной устойчивости нужно принять специальные меры. Во всех циклических ускорителях вертикальная устойчивость обеспечивается способом, схематически показанным на рис. 40.
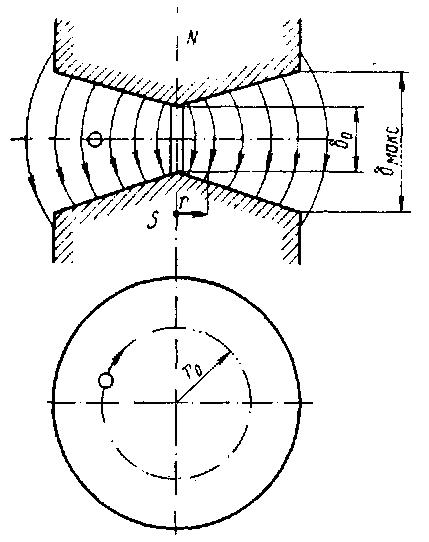
Рис. 40. Схема электромагнита с падающей по радиусу напряженностью магнитного поля для обеспечения вертикальной устойчивости частицы
Зазор магнита, в котором происходит ускорение частиц, растет с увеличением радиуса. Напряженность магнитного поля Н при этом падает, и силовые линии поля оказываются искривленными, бочкообразными. Плоскость орбиты частицы совпадает со средней плоскостью зазора магнита, и всякое отклонение частицы в вертикальном направлении и отход ее от средней плоскости приводит к появлению вертикальной фокусирующей силы, т. е. силы, которая возвращает частицу обратно к средней плоскости. Представим себе, как показано на рис. 41, частицу, отклонившуюся от средней плоскости СС, и оказавшуюся на расстоянии Z от нее в точке А. На рисунке кривизна силовых линий показана утрированно большой. В действительности в ускорителях силовые линии имеют незначительную кривизну.
Радиус кривизны силовых линий пересекает среднюю линию в точке 0. С достаточной степенью приближения можно считать, что силовые линии представляют собой окружности, проведенные из точки 0 как из центpa. При весьма малой кривизне, которая обычно достаточна для осуществления вертикальной фокусировки в ускорителе описаннoro типа, такое допущение не приводит к существенным ошибкам в дальнейших рассуждениях. Центробежная сила Рс направлена горизонтально. Лоренцева сила всегда действует в направлении нормали к силовым линиям магнитного поля. Составляющая РН·cosα компенсирует центробежную силу, а на равновесной орбите в точности ей равна Рс= РН·cosα.
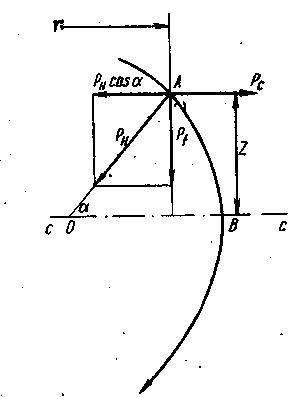
Рис. 41. Векторная диаграмма сил, выясняющая природу вертикальной фокусировки частиц
Таким образом фокусирующая сила равна
 .
.
Если Z < R, как это бывает в обычных машинах, то РН можно считать постоянной и не зависящей от R. В наших рассуждениях изменение Z связано с перемещением положения частицы вдоль силовой линии. При Z = 0 частица находится в точке В. Радиус вращения частицы изменится при изменении Z. Это вызывает изменение центробежной силы, а следовательно, и равной ей постоянной составляющей PHcos a. Обычно отклонение Z порядка 2…3 см, а радиус кривизны силовых линий составляет несколько метров. При этих значениях Z и R величиной Δr можно пренебречь и считать, что фокусирующая сила Pf пропорциональна Z. Нетрудно показать, что при отрицательном Z, т. е. при отклонении частицы от средней плоскости СС вниз появляется фокусирующая сила, направленная вверх, т. е. сила, стремящаяся, вернуть частицу на среднюю плоскость. Здесь мы имеем дело с вертикальной фокусировкой. Магнитное поле, силовые линии которого имеют конфигурацию, показанную на рис. 40, обладает фокусирующими свойствами. Таким образом, радиальную фокусировку осуществляет механизм, показанный на рис. 38, а вертикальную — механизм, который иллюстрируется рис. 41.
Так как движение частиц в ускорителе происходит без трения, то все частицы, отклоненные от вертикального направления, в средней плоскости совершают незатухающие гармонические к колебания с амплитудой Az (рис. 42).
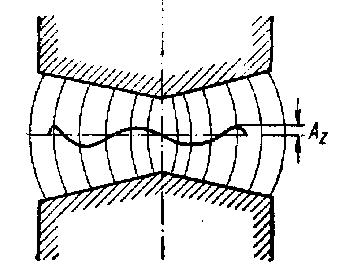
Рис. 42. Свободные вертикальные колебания частиц
Частота колебаний может быть как меньше частоты обращения частицы, так и больше ее. При движении частиц, устойчивых как в вертикальном, так и в горизонтальном направлении, они могут занимать любое положение внутри некоторой кольцевой области, схематически показанной на рис. 43.
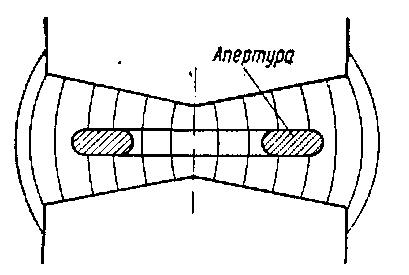
Рис. 43. Область, которую занимают частицы, движущиеся в магнитном поле
вследствие наличия колебаний
Сечение этого кольцевого пространства называется апертурой пучка. Как известно, кривизна силовых линий всегда связана с изменением величины поля в пространстве. В ускорителях необходимая для вертикальной фокусировки кривизна поля обычно создается путем постепенного увеличения зазора между полюсами при увеличении радиуса (см. рис. 7). Напряженность поля в зазоре здесь падает почти обратно пропорционально величине зазора. Изменяя закон, по которому величина зазора зависит от радиуса, можно получить любой закон изменения напряженности поля. Изменение напряженности магнитного поля в зависимости от радиуса орбиты частиц может быть определено формулой

Чем больше n, тем сильнее изменяется магнитное поле в зависимости от радиуса. На рис. 44 схематически представлены пять вариантов: n = 0; n < 0; n > 1; n = 1; 0 < n < 1.
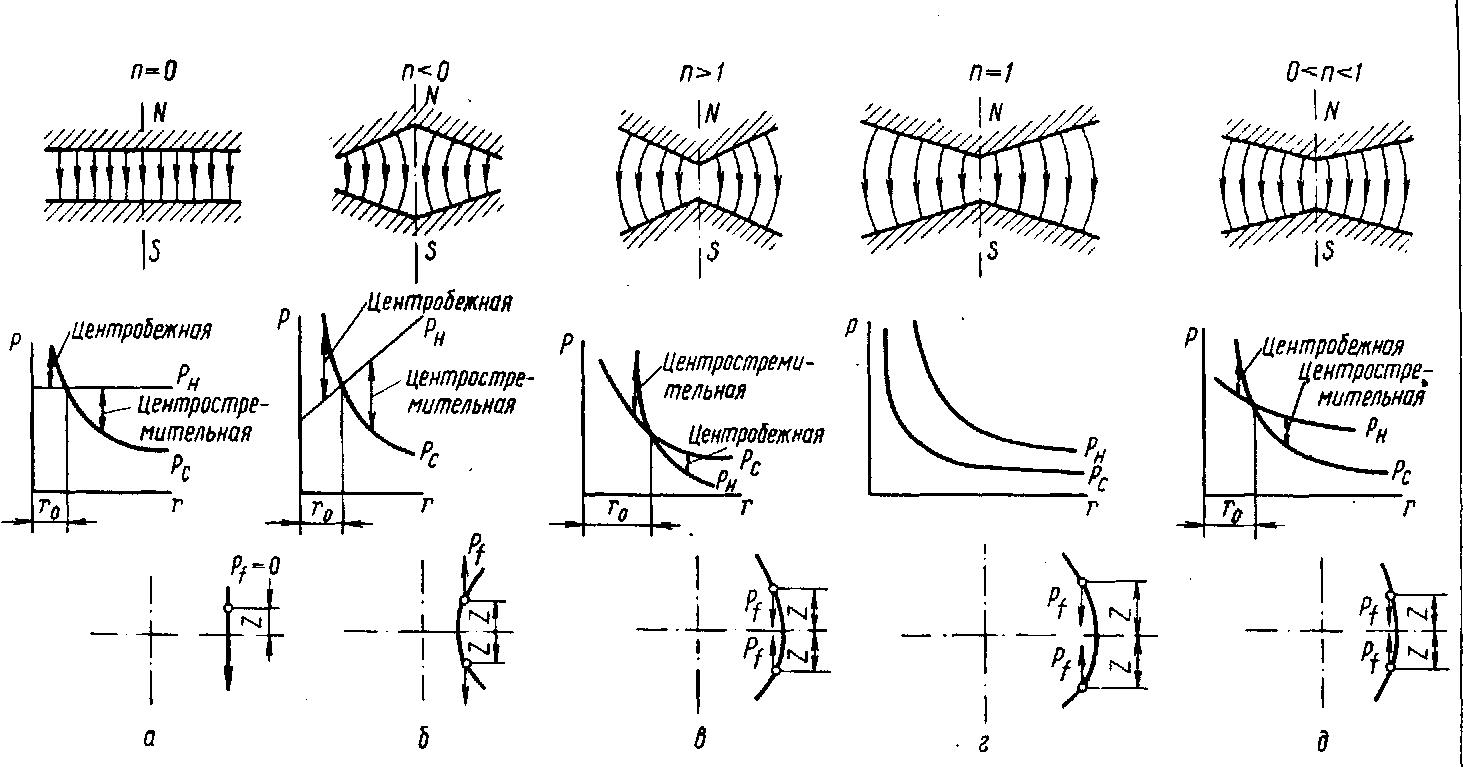
Рис. 44. Схема радиальных и осевых фокусирующих и дефокусирующих сил при различных значениях n
Рассмотрим эти предельные случаи с точки зрения обеспечения устойчивости движения частицы.
Вариант а соответствует п = 0 Н = H0. Напряженность поля не зависит от радиуса и поле равномерно. Здесь имеется достаточно сильная радиальная фокусировка. Вертикальная фокусирующая сила здесь отсутствует, Pf = 0. Частица может свободно перемещаться в вертикальном направлении вдоль силовых линий.
Вариант б соответствует п < 0. Это случай нарастающего по радиусу магнитного поля, что может быть достигнуто постепенным уменьшением зазора от центра к периферии сечения магнита. Радиальная фокусировка здесь очень сильная. Однако этот вариант совершенно неприемлем с точки зрения обеспечения вертикальной фокусировки. Как показано на схеме внизу, здесь кривизна силовых линий создает вертикальную деформирующую силу Pf. Это означает, что малейшее отклонение частицы от средней плоскости приводит к появлению силы, стремящейся еще дальше отклонить ее от первоначального положения. Увеличение дефокусирующей силы растет пропорционально отклонению. Устойчивое движение частиц в таком поле, несмотря на наличие сильной радиальной фокусировки, невозможно. Все частицы гораздо быстрее, чем в варианте а, потеряются на полюсах магнита.
Вариант в соответствующий п > 1, характеризуется очень сильным спадом напряженности магнитного поля вдоль радиуса. Такой спад может быть получен при ярко выраженной конической форме полюсов. Здесь напряженность магнитного поля, а, следовательно, и лоренцева сила обратно пропорциональна радиусу в степени, большей 1. Поэтому кривые центробежной и лоренцевой сил пересекутся в точке, соответствующей равновесной орбиты. Однако, как следует из рис. 44, в движение будет неустойчивым в радиальном направлении.
При переходе частиц на радиус, больший, чем ro, преобладает центробежная сила, а при переходе на радиус, меньший ro —центростремительна я.
Таким образом, любое отклонение от равновесной орбиты в радиальном направлении приводит к появлению силы, стремящейся увеличить это отклонение. В результате невозможно, обеспечить устойчивость движения частиц и они неминуемо потеряются на боковых стенках вакуумной камеры.
Вертикальная фокусировка в этой системе оказывается очень сильной. Вследствие большой кривизны магнитного поля малейшее отклонение от средней плоскости на величину Z приводит к появлению большой вертикальной фокусирующей силы Pf. Вследствие радиальной неустойчивости вариант в непригоден для обеспечения нормального движения частиц.
Вариант г соответствует значению п = 1. Здесь напряженность магнитного поля изменяется обратно пропорционально радиусу так же, как и величина центробежной силы. Поэтому обе кривые — Рн и Рс представляют собой гиперболы, которые нигде не пересекаются. Частицы в радиальном направлении находятся в безразличном положении. Радиальная фокусировка отсутствует. Вертикальная фокусировка здесь слабее, чем в предыдущем случае, но достаточно сильная. Вариант п = 1 также не может быть применен в циклических ускорителях вследствие неустойчивости движения частиц.
Вариант д, соответствующий 0 < п <1, обеспечивает как вертикальную, так и горизонтальную устойчивость движения частиц. Здесь напряженность магнитного поли, а, следовательно, и лоренцева сила падает медленнее, чем центробежная, с увеличением радиуса. Кривые Рн и Рс пересекаются в точке r = ro, соответствующей равновесной орбите. Всякое отклонение частицы от равновесной орбиты в сторону увеличения радиуса приводит к появлению центростремительной, а в сторону уменьшения — центробежной силы. Движение оказывается в радиальном направлении устойчивым. Достаточная кривизна силовых линий обеспечивает вертикальную фокусировку. Отклонение частицы от средней плоскости приводит к появлению вертикальной фокусирующей силы Pf. Таким образом, для обеспечения устойчивого движения частиц, как в радиальном, так и в вертикальном направлении необходимо соблюдение условия
0 <n <1.
Это условие называется иногда условием устойчивого движения частиц при мягкой фокусировке. Показатель спада магнитного поля п
![]()
Таким образом, показатель спада магнитного поля представляет собой отношение радиуса к напряженности магнитного поля, соответствующей этому радиусу, умноженному на градиент магнитного поля по радиусу.