

3. Кинетический момент ротора гироскопа
Для уяснения физической сущности кинетического момента воспользуемся понятием "количество движения".
Количеством движения материальной точки называется произведение массы этой точки на её линейную скорость.
Л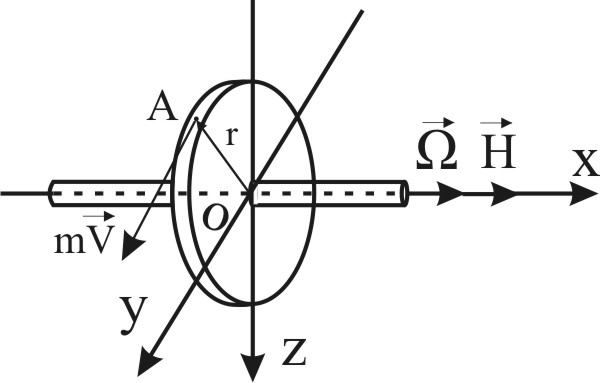 инейная
скорость точки - вектор, следовательно,
количество движения также вектор,
приложенный к движущейся точке и
совпадающий
по направлению с вектором линейной
скорости (рис. 5).
инейная
скорость точки - вектор, следовательно,
количество движения также вектор,
приложенный к движущейся точке и
совпадающий
по направлению с вектором линейной
скорости (рис. 5).
На рис. 5 изображен гироскоп, вращающийся с угловой скоростью Ω. Выделим в теле ротора j гироскопа материальную точку А с элементарной массой т. Эта точка движется по окружности радиусом r с линейной скоростью V .числовое значение которой V = r ·Ω . Вполне очевидно, что вектор количества движения mV точки А направлен по касательной к окружности, описываемой точкой.
Рис.5 Моментом количества движений материальной точки (h) относительно оси называется произведение количества движения этой точки на её расстояние до оси вращения. Применительно к ротору гироскопа имеем:
![]() ; (5)
; (5)
Вектор момента количества движения строят на оси вращения и направляют в сторону, с которой вращение точки усматривается против движения часовой стрелки.
Взяв множество точек на роторе, просуммировав их моменты количества движения, получим главный момент количества движения ротора гироскопу Н:
![]() (6)
(6)
Так как угловые скорости всех точек вращающегося ротора одинаковы, поэтому
![]() (7)
(7)
В равенстве (7) надо учитывать, что угловая скорость вращения и главный момент количества движения - векторные величины.
Главный момент количества движения (Н) ротора гироскопа относительно оси вращения называется кинетическим моментом.
4. Теорема об изменении кинетического момента
Эта теорема определяет закон изменения вектора кинетического момента Н при действии на вращающееся тело моментов внешних сил. Этот закон имеет несколько формулировок, одна из которых относится к изменению кинетического момента системы относительно точки, которая и будет нас интересовать, т.к. главная ось гироскопа совершает движение относительно неподвижной точки -точки подвеса гироскопа.
Теорема об изменении вектора кинетического момента, или закон моментов, применительно к гироскопу формулируется следующим образом.
Производная по времени от вектора кинетического момента вращающегося гироскопа относительно точки равна вектору главного момента всех внешних сил ( L ), действующих на гироскоп, относительно той же точки
L =dH/dt (8)
Анализ формулы (8) показывает, что кинетический момент величина переменная и является функцией времени. Во всех случаях изменение вектора Н во времени определяется вектором главного момента внешних сил (L), приложенных к гироскопу. Если векторы Н и L совпадают или диаметрально противоположны, то L характеризует изменение модуля Н. Если Н и L взаимно перпендикулярны, то L характеризует изменение только направления вектора Н. Если Н и L составляют угол, отличный от О0 , 90°, 180°и 270° то L характеризует и изменение модуля вектора Н, и изменение его направления.
Известно, что производная по времени от вектора равна линейной скорости движения конца этого вектора, т.е.
dH/dt = V (9)
где: V - вектор линейной скорости конца вектора Н. Сравнивая формулы 8 и 9, можно написать
V=L (10)
Р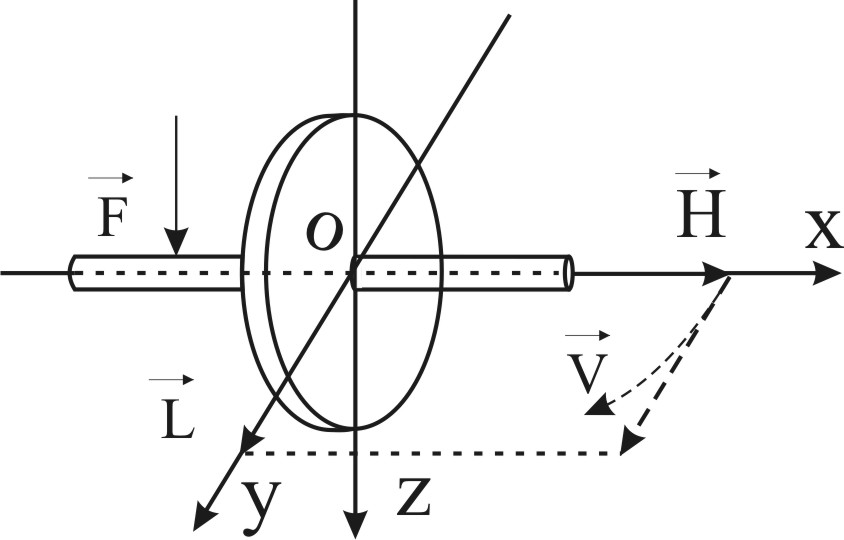 авенство
(10) дает геометрическое толкование
теоремы об изменении кинетического
момента, известное под названием теоремы
Резаля.
авенство
(10) дает геометрическое толкование
теоремы об изменении кинетического
момента, известное под названием теоремы
Резаля.
Теорему Резаля применительно к вращающемуся гироскопу можно сформулировать так: вектор линейной скорости V конца вектора кинетического момента Н гироскопа относительно точки подвеса 0, равен вектору главного момента L всех внешних сил, действующих на гиро-
Рис. 6 скоп, относительно той же точки.
Анализ закона моментов показывает, что под действием момента L внешней силы F вектор Н (главная ось X гироскопа) будет перемещаться в инерциальном пространстве не в направлении действия внешней силы, а в направлении действия момента этой силы, (рис.6).
Этот закон имеет значение для понимания физической сущности свойств гироскопа.