

10.3. Задачи обработки результатов моделирования
Наиболее часто при обработке результатов компьютерного эксперимента возникают такие задачи, как сравнение средних значений и дисперсий переменных, полученных в результате моделирования, проверка однородности распределений, определение эмпирического закона распределения случайной величины, и т. п. Подобные задачи являются типовыми задачами по проверке статистических гипотез.
Наиболее общей из названных выше является задача определения эмпирического закона распределения случайной величины. Для ее правильного решения требуется большое количество реализаций N. По результатам компьютерного эксперимента находятся значения выборочного закона распределения Fэ(у) или функции плотности wэ(у) и выдвигается гипотеза Но, которая означает, что полученное эмпирическое распределение согласуется с каким-либо теоретическим распределением. Затем эта гипотеза Но проверяется с помощью статистических критериев согласия, причем необходимую в этом случае статистическую обработку результатов стараются вести непосредственно в процессе компьютерного моделирования системы.
Далее выбирается некоторая случайная величина U, характеризующая степень расхождения теоретического и эмпирического распределения, связанную с недостаточностью статистических данных и другими случайными причинами. Величина U служит для принятия или опровержения нулевой гипотезы Но. Закон распределения этой случайной величины зависит от закона распределения случайной величины η и числа реализаций N при статистическом моделировании системы. Если вероятность расхождения теоретического и эмпирического распределений Р{UT≥UЭ} велика в понятиях применяемого критерия согласия, то проверяемая гипотеза о виде распределения Н0 не опровергается. Выбор вида теоретического распределения F(у) или w(у) проводится по графикам (гистограммам) Fэ(у) или wэ(у), выведенным на печать или на экран дисплея.
Рассмотрим особенности использования при обработке результатов компьютерного моделирования системы наиболее распространенных критериев согласия.
10.3.1. Критерий согласия Колмогорова
Критерий согласия Колмогорова основан на выборе в качестве меры расхождения U величины D=max[Fэ(у)–F(у)].
Из
теоремы Колмогорова следует, что δ=D![]() при
N→∞
имеет функцию распределения
при
N→∞
имеет функцию распределения

Если вычисленное на основе экспериментальных данных значение δ меньше, чем табличное значение при выбранном уровне значимости γ, то гипотезу Но принимают, в противном случае расхождение между Fэ(у) и F(у) считается неслучайным и гипотеза Но отвергается.
Критерий Колмогорова для обработки результатов моделирования целесообразно применять в тех случаях, когда известны все параметры теоретической функции распределения. Недостаток использования этого критерия связан с необходимостью фиксации в памяти компьютера для определения D всех статистических частот с целью их упорядочения в порядке возрастания.
10.3.2. Критерий согласия Пирсона
Критерий согласия Пирсона основан на определении в качестве меры расхождения U величины:
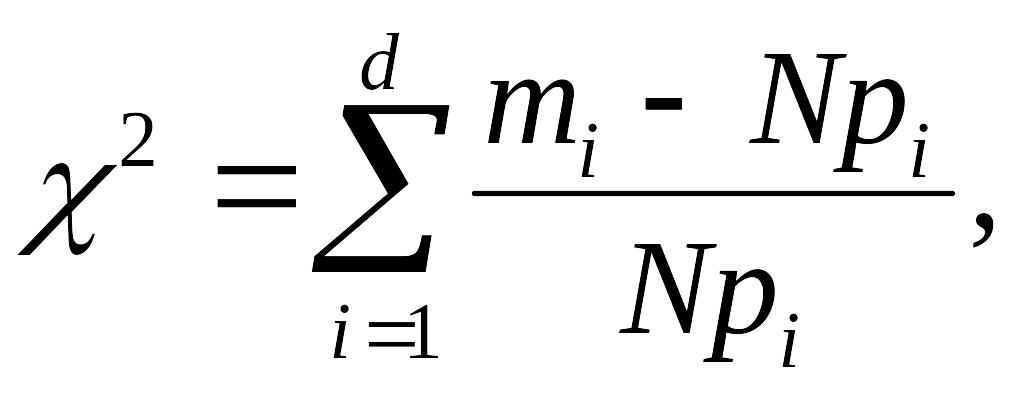
где mi – количество значений случайной величины η, попавших в i-й подынтервал; pi – вероятность попадания случайной величины η в i-й подынтервал, вычисленная из теоретического распределения; d – количество подынтервалов, на которые разбивается интервал измерения в компьютерном эксперименте.
При N→∞ закон распределения величины U, являющейся мерой расхождения, зависит только от числа подынтервалов и приближается к закону распределения χ2 (хи-квадрат) с (d–r–1) степенями свободы, где r – число параметров теоретического закона распределения.
Из теоремы Пирсона следует, что, какова бы ни была функция распределения F(у) случайной величины η, при N→∞ распределение величины χ2 имеет вид:

где Г(k/2) – гамма-функция; z – значение случайной величины χ2; k=d–r–1 – число степеней свободы. Функции распределения Fk(z) табулированы.
По
вычисленному значению U=χ2
и числу степеней свободы k
с помощью таблиц находится вероятность
Р{![]() }.
Если эта вероятность превышает некоторый
уровень значимости γ, то считается, что
гипотеза Н0
о виде распределения не опровергается
результатами компьютерного эксперимента.
}.
Если эта вероятность превышает некоторый
уровень значимости γ, то считается, что
гипотеза Н0
о виде распределения не опровергается
результатами компьютерного эксперимента.