

5. Аналитические вероятностные математические модели систем
Среди аналитических вероятностных математических моделей систем одним из наиболее востребованных классов является класс непрерывно-стохастических моделей, который также называют Q-схемами (от англ. queue – очередь). Эти модели характерны для теории массового обслуживания, рассматривающей абстрактные процессы обслуживания неких заявок, которые помимо всего прочего могут образовывать очереди.
5.1. Аналитические модели систем массового обслуживания
Аналитическое исследование систем массового обслуживания (СМО) является подходом, альтернативным имитационному моделированию, и состоит в получении формул для расчета выходных параметров СМО с последующей подстановкой значений аргументов в эти формулы в каждом отдельном эксперименте.
В моделях СМО рассматривают следующие объекты:
1) заявки на обслуживание (транзакты);
2) обслуживающие аппараты (ОА), или приборы.
Практическая задача теории массового обслуживания связана с исследованием операций этими объектами и состоит из отдельных элементов, на которые влияют случайные факторы.
В качестве примера задач, рассматриваемых в теории массового обслуживания, можно привести: согласование пропускной способности источника сообщения с каналом передачи данных, анализ оптимального потока городского транспорта, расчет емкости зала ожидания для пассажиров в аэропорту и пр.
Заявка может находиться либо в состоянии обслуживания, либо в состоянии ожидания обслуживания.
Обслуживающий прибор может быть либо занят обслуживанием, либо свободен.
Состояние СМО характеризуется совокупностью состояний обслуживающих приборов и заявок. Смена состояний в СМО называется – событие.
Модели СМО используются для исследования процессов происходящие в системе, при подаче на входы потоков заявок. Эти процессы представляют собой последовательность событий.
5.1.1. Важнейшие выходные параметры смо
Производительность
Пропускная способность
Вероятность отказа в обслуживании
Среднее время обслуживания;
Коэффициент загрузки оборудования (ОА).
Заявками могут быть заказы на производство изделий, задачи, решаемые в вычислительной системе, клиенты в банках, грузы, поступающие на транспортировку и др. Очевидно, что параметры заявок, поступающих в систему, являются случайными величинами и при исследовании или проектировании могут быть известны лишь их законы распределения.
В связи с этим анализ функционирования на системном уровне, как правило, носит статистический характер. В качестве математического аппарата моделирования удобно принять теорию массового обслуживания, а в качестве моделей систем на этом уровне использовать системы массового обслуживания.
5.1.2. Простейшие модели смо
В простейшем случае СМО представляет собой некоторое устройство, называемое обслуживающим аппаратом (ОА), с очередями заявок на входах.
М о д е л ь о б с л у ж и в а н и я с о т к а з а м и (рис.5.1)
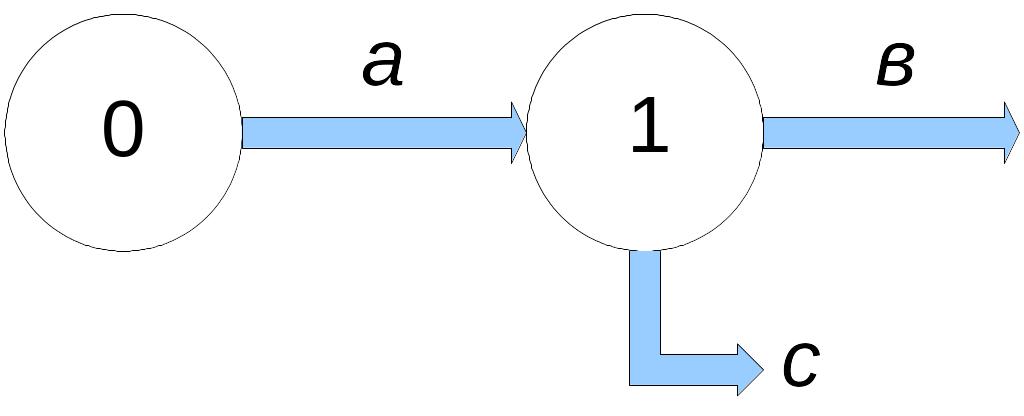
Рис. 5.1. Модель СМО с отказами:
0 – источник заявок;
1 – обслуживающий прибор;
а – входной поток заявок на обслуживание;
в – выходной поток обслуженных заявок;
с – выходной поток необслуженных заявок.
В этой модели отсутствует накопитель заявок на входе ОА. Если заявка приходит от источника 0 в момент времени, когда ОА занят обслуживанием предыдущей заявки, то вновь пришедшая заявка выходит из системы (так как ей отказано в обслуживании) и теряется (поток с).
М о д е л ь о б с л у ж и в а н и я с о ж и д а н и е м (рис. 5.2)
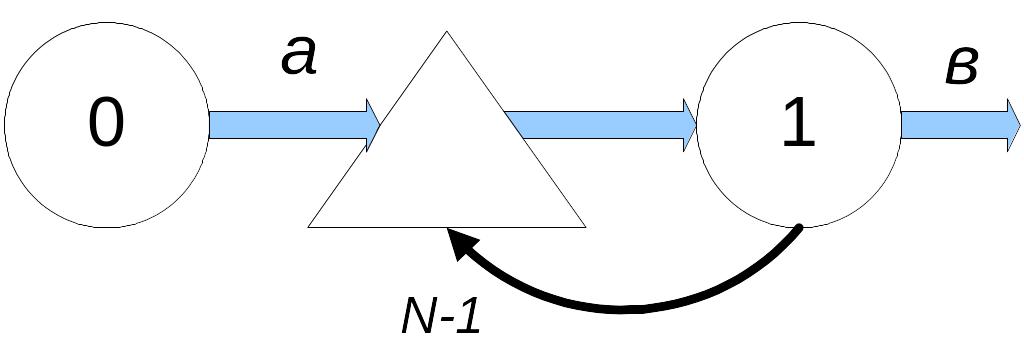
Рис. 5.2. Модель СМО с ожиданием
(N–1) – количество заявок, которое может поместиться в накопителе
В этой модели имеется накопитель заявок на входе ОА. Если заявка приходит от источника 0 в момент времени, когда ОА занят обслуживанием предыдущей заявки, то вновь пришедшая заявка попадает в накопитель, где неограниченно долго ожидает, пока освободится ОА.
М о д е л ь о б с л у ж и в а н и я с о г р а н и ч е н н ы м в р е м е н е м
о ж и д а н и я (рис. 5.3)
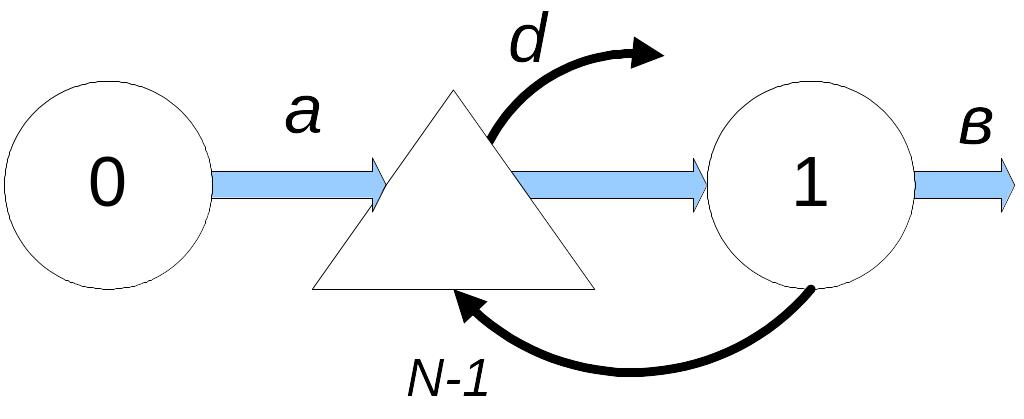
Рис. 5.3. Модель СМО с ограниченным временем ожидания:
d – поток заявок, покидающих систему при превышении времени ожидания
В этой модели, как и в предыдущей, имеется накопитель заявок на входе ОА, но время нахождения заявки в накопителе ограничено некоторой величиной.
М н о г о к а н а л ь н а я м о д е л ь СМО с о т к а з а м и (рис. 5.4).

Рис. 5.4. Многоканальная модель СМО с отказами:
n – количество одинаковых обслуживающих аппаратов (приборов)
В этой модели имеется не один ОА, а несколько. Заявки, если это специально не оговорено, могут поступать к любому свободному от обслуживания ОА. Накопителя нет, поэтому данная модель включает свойства модели, показанной на рис. 5.1: отказ в обслуживании заявки означает ее безвозвратную потерю (это происходит только в том случае, если в момент прихода этой заявки все ОА заняты).
М н о г о к а н а л ь н а я м о д е л ь СМО с о г р а н и ч е н н ы м
в р е м е н е м о ж и д а н и я (рис. 5.5)

Рис. 5.5. Многоканальная модель СМО с ограниченным временем ожидания
Эта модель объединяет в себе свойства моделей, представленных на рис. 5.3. и 5.4.
М н о г о к а н а л ь н а я м о д е л ь СМО с о ж и д а н и е м
и в о с с т а н о в л е н и е м о т к а з а в ш и х ОА (рис. 5.6)
Рис. 5.6. Многоканальная модель СМО с ожиданием и восстановлением ОА:
e – обслуживающие аппараты, вышедшие из строя;
f – восстановленные обслуживающие аппараты
Данная модель обладает свойствами моделей, представленных на рис. 5.2 и 5.4, а кроме того свойствами, позволяющими учитывать возможные случайные отказы ОА, которые в этом случае поступают в ремонтный блок 2, где пребывают в течение случайных промежутков времени, затрачиваемых на их восстановление, а затем вновь возвращаются в обслуживающий блок 1.
М н о г о к а н а л ь н а я м о д е л ь СМО с о г р а н и ч е н н ы м
в р е м е н е м о ж и д а н и я и в о с с т а н о в л е н и е м ОА (рис. 5.7)
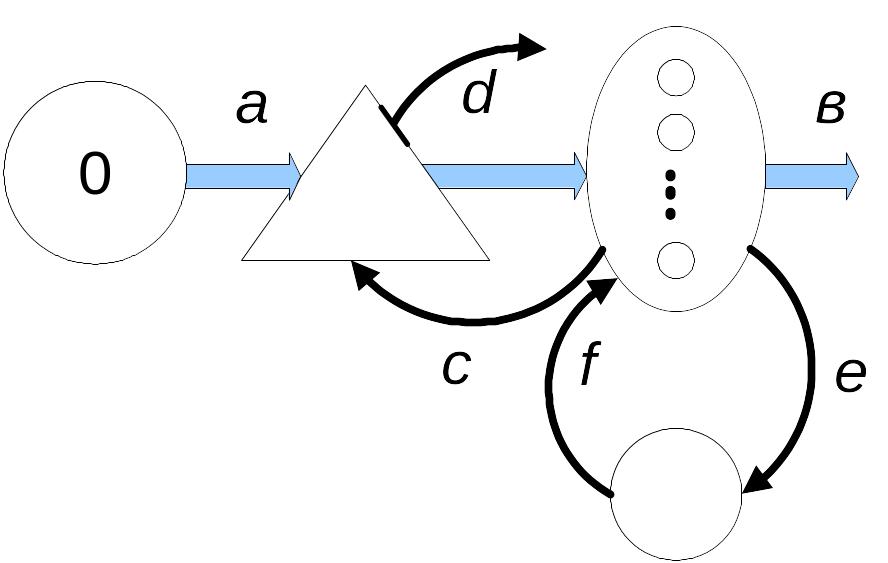
Рис. 5.7. Многоканальная модель СМО с ограниченным временем ожидания и восстановлением ОА
Данная модель является довольно сложной, поскольку одновременно учитывает свойства двух не самых простых моделей (рис. 5.5 и 5.6).