

9.1.2 Расчёт параметров контуров регулирования скорости
Не компенсируемая постоянная времени привода:
To=TФ+TЭ=0,01+0,01=0,02 (с). (50)
Величина коэффициента обратной связи по скорости
 ,
(51)
,
(51)
где К РС=1;
 .
.
Максимальное напряжение на входе регулятора скорости
 (52)
(52)
 (В).
(В).
Расчет статических характеристик производится в соответствии с соотношением
 (1/с). (53)
(1/с). (53)
Данные расчетов сведены в таблице 5 и приведены на рисунке 9.
Таблица 5
|
с-1 |
314 |
312 |
311 |
309 |
307 |
305 |
304 |
302 |
300 |
298 |
296 |
М |
Нм |
0 |
0,2 |
0,4 |
0,6 |
0,8 |
1 |
1,2 |
1,4 |
1,6 |
1,8 |
2 |
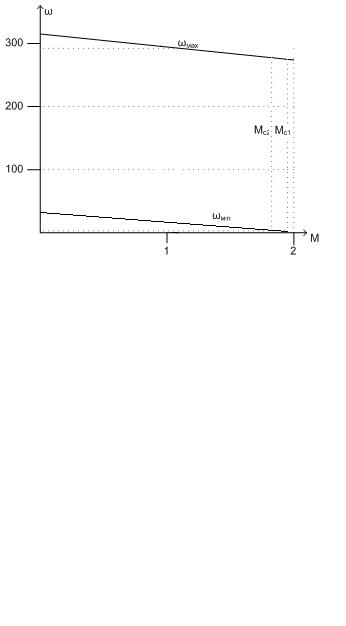
Рисунок 9. Механические характеристики.
Значения статических моментов, необходимых для определения наибольшей и наименьшей скорости определяются по формулам:
 (Нм) (54)
(Нм) (54)
 ,(Нм) (55)
,(Нм) (55)
где ρ=V/ω=1.6/314.16=0.00509;
 ;
;
 .
.
При изменении нагрузки двигателя в пределах от МС1 до МС2 диапазон регулирования скорости составит (исходя из рисунка 9):
 . (56)
. (56)
Следовательно, пропорциональный регулятор скорости (с коэффициентом усиления к=1,4) позволяет получить достаточный диапазон регулирования скорости.
9.1.3 Расчёт параметров контуров регулирования положения
Расчет параметров контура регулирования положения ведется в следующей последовательности. При известных параметрах механической части определяется максимальный угол поворота вала двигателя при отработке заданного перемещения выходной оси рабочего органа. Пусть ро max = 6,28 рад. При передаточном числе редуктора i=100 максимальный угол поворота вала двигателя составит
дв max=ро maxi=6,28100=628(рад). (57)
Величина коэффициента
обратной связи по положению при выборе
 составит
составит
 ; (58)
; (58)
Коэффициент усиления регулятора положения определяется по формуле:
 (59)
(59)
Далее определяется допустимое значение начальной скорости привода, при которой момент привода в процессе замедления не будет достигать стопорного значения при Мc = 0.
 (1/с); (60)
(1/с); (60)
.
Условие нач доп max не выполняется, коэффициент усиления регулятора положения рассчитывается по соотношению:
 , (61)
, (61)
где максимальное
ускорение
 ,
находится по формуле:
,
находится по формуле:
 . (62)
. (62)
Тогда:

Величина статической ошибки позиционирования определяется в соответствии с выражением (Мс = Мн):
 (рад) (63)
(рад) (63)
Величина шага интегрирования находится по формуле:
 (64)
(64)
Путь, проходимый приводом при пуске и торможении:
 (65)
(65)
Видно, что
 поэтому отработка перемещения приводом
идет с треугольным графиком скорости.
Время переходного процесса при этом
поэтому отработка перемещения приводом
идет с треугольным графиком скорости.
Время переходного процесса при этом
 ;
(66)
;
(66)
Отсюда берем время
счета
 .
.
Расчёт статических характеристик электропривода в замкнутой системе
В замкнутой системе уравнение статической характеристики:
 (67)
(67)
Электромеханическая постоянная времени:
 =
= = 0,0282 (68)
= 0,0282 (68)
 –
–
 =
349,4 (рад/c)
=
349,4 (рад/c)