

9.1 Составление функциональной схемы и расчёт параметров функциональных преобразователей
(Кур. Расч.ЭП Динамич. харак. MathLab)
Для реализации частотно-токового управления необходима реализация нелинейных зависимостей I1max=f(Sa) и 1=f(Sa). Для обеспечения условия 2=const в динамических процессах необходимо регулировать амплитуду и фазу тока статора по формулам
 (А) (17)
(А) (17)
 . (18)
. (18)
Электрическая скорость вращения поля статора, соответствующая номинальной частоте:
 (с-1)
(19)
(с-1)
(19)
Индуктивность главного поля, полей рассеяния статора и ротора АД:
 (Гн) (20)
(Гн) (20)
 (Гн)
(21)
(Гн)
(21)
 (Гн) (22)
(Гн) (22)
Индуктивность статорной и роторной цепи:
 (Гн) (23)
(Гн) (23)
 (Гн) (24)
(Гн) (24)
Потокосцепление ротора
 определяется из соотношения:
определяется из соотношения:
 (25)
(25)
Значение 2max определим из номинального режима работы АД, полагая при этом треугольник токов прямоугольным:
 (26)
(26)
где
 ;
;
 – амплитудные значения токов.
– амплитудные значения токов.
 (27)
(27)
 (А)
(А)
 (А)
(А)
Амплитудное значение потокосцепления трехфазной машины
 (Вб)
(Вб)
Амплитудное значение потокосцепления двухфазной машины
 (28)
(28)
По соотношениям (16) и (17) рассчитаны зависимости I1max(2)=f(Sa) и 1=f(Sa), данные расчетов сведены в таблице 3 и приведены на рисунке 2.
Пересчет зависимостей производится на основании соотношений:
 (29)
(29)
 (30)
(30)
Рассчитываем механические характеристики в системе частотно-токового управления, обеспечивающей поддержание 2max = const. Выражение для электромагнитного момента двигателя
 ,
(31)
,
(31)
Зависимости M=f(), I1max(2)=f(), I1max(3)=f() и I1=f() приведены на рисунках 3 и 4.
При идеальном поддержании 2max = const электромагнитная постоянная времени двигателя равна нулю, однако в связи с неточностями компенсации возможные проявления электромагнитной инерции следует учитывать малой некомпенсируемой постоянной TЭ .
Структурная схема будет иметь вид, отображенный на рисунке 4(а). Данной структуре соответствует функциональная схема пос троения системы частотно-токового управления, приведенная на рисунке 4(б).
Для построения такой системы необходимо иметь ПЧ с тремя входами, кроме того, АД должен быть снабжен датчиком скорости для определения абсолютного скольжения.
Таблица 3. Данные для построения зависимостей
S a |
I1max(2) |
1 |
M |
|
|
А |
Гр |
Нм |
c-1 |
-1 |
37,01 |
-88,66 |
-77,87 |
628 |
-0,8 |
29,61 |
-88,32 |
-62,3 |
565,2 |
-0,6 |
22,22 |
-87.76 |
-46,72 |
502,4 |
-0,4 |
14,83 |
-86,64 |
-31,15 |
439,6 |
-0,2 |
7,45 |
-83,31 |
-15,57 |
376,8 |
0 |
0,87 |
0 |
0 |
314 |
0,2 |
7,45 |
83,31 |
15,57 |
251,2 |
0,4 |
14,83 |
86.64 |
31,15 |
188,4 |
0,6 |
22.22 |
87,76 |
46,72 |
125,6 |
0,8 |
29,61 |
88,32 |
62,3 |
62,8 |
1 |
37,01 |
88,66 |
77,87 |
0 |

Рисунок 3. Зависимости I1max(2)=f(Sa), I1max(3)=f(Sa), I1=f(Sa)
Р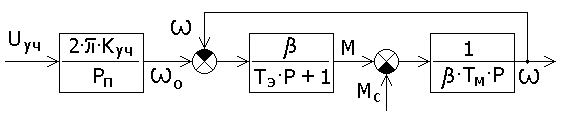 исунок
4. Зависимость 1=f(Sa)
исунок
4. Зависимость 1=f(Sa)
а )
)
б)
Рисунок 5. Структурная и функциональная схемы системы частотно-токового управления.