

Пример 6.3 Расчёт параметров двигателя и моделирование характеристик
Исходя из задания выбираем асинхронный двигатель серии 5А - 5АМ315M4У3. Основные характеристики приведены в табл. 1:
Таблица 1.
Номинальная мощность, кВт |
250 |
Номинальная частота вращения, об/мин |
1485 |
Коэффициент полезного действия, % |
95,7 |
Коэффициент мощности |
0,87 |
Номинальный ток при 380 В, А |
456 |
Номинальный момент, Нм |
1613 |
Индекс механической характеристики |
V |
Отношение пускового момента к номинальному моменту |
1,7 |
Отношение пускового тока к номинальному току |
5,6 |
Отношение максимального момента к номинальному моменту |
1,8 |
Динамический момент инерции ротора, кг*м2 |
3,97 |
Масса, кг |
1145 |

Рисунок 6 –Двигатель серии 5А
Для защиты двигателей в аварийных режимах, следствием которых может быть нагрев обмотки до недопустимой температуры, двигатель комплектуется встроенными температурными датчиками (полупроводниковые терморезисторы с положительным температурным коэффициентом - позисторы). Датчики встраиваются в лобовые части обмотки статора со стороны противоположной вентилятору наружного обдува по одному в каждую фазу, соединяются последовательно, концы цепи датчиков выводятся на клеммы в коробке выводов. К этим клеммам подключают реле или иной аппарат, реагирующий на сигнал датчиков.Этот двигатель обеспечивает подачу насоса 750 м3/час при напоре 100 м.в.ст.
Рассчитываем параметры АД:
- Номинальная скорость вращения двигателя:
 ,
получаем:
ном
= 155,4 рад/с
,
получаем:
ном
= 155,4 рад/с
- Скорость вращения на ХХ:
 об/мин
об/мин
- Частота вращения на ХХ:
 с-1
с-1
- Номинальное скольжение:

С помощью программы Matlab рассчитаем параметры для T-образной схемы замещения:
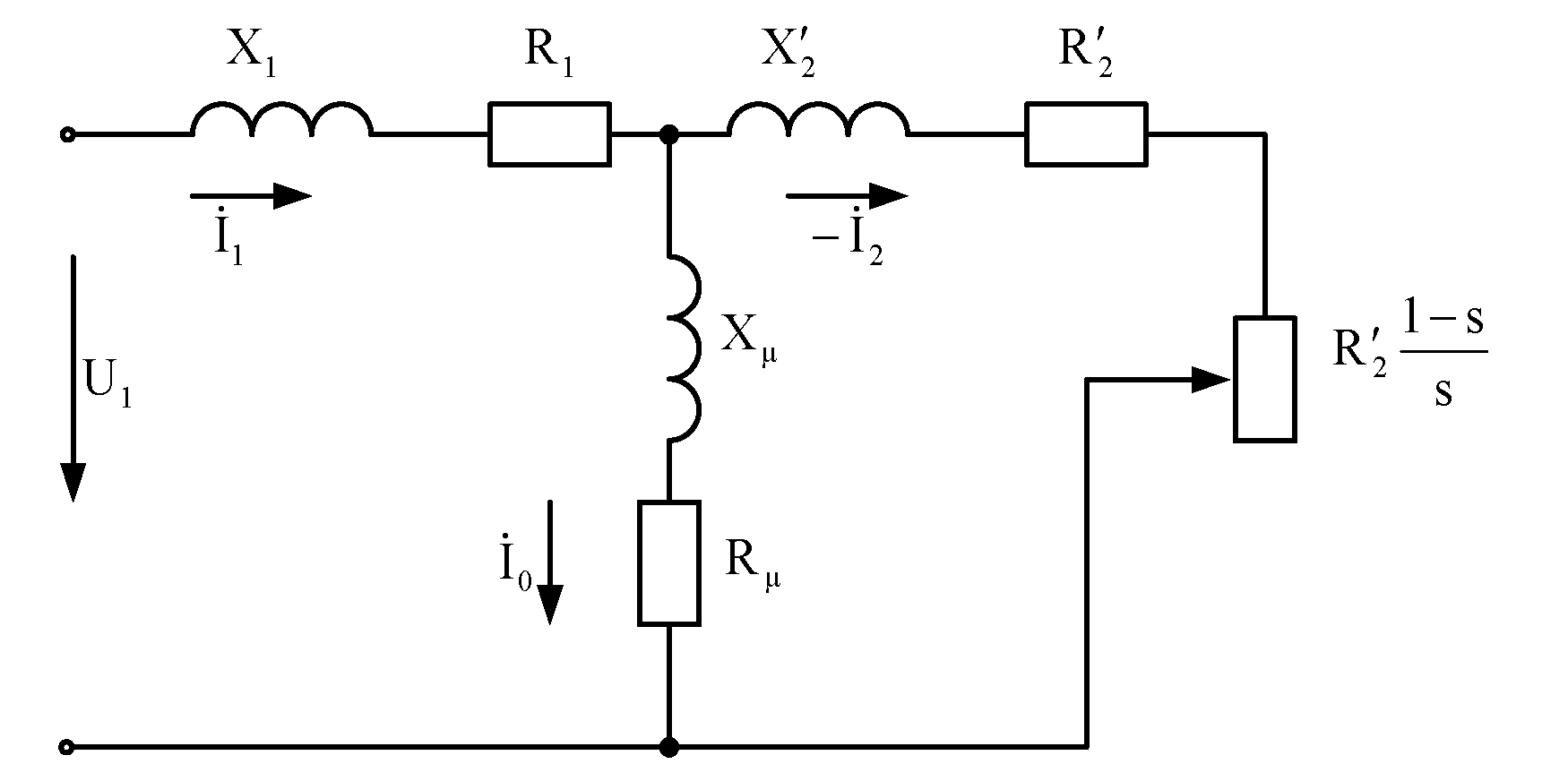
Рисунок – 7 Т-образная схема замещения АД
главное индуктивное сопротивление Xµ 3,48
активное сопротивление обмотки статора R1 0,0037
индуктивное сопротивление рассеяния обмотки статора X1 0,06
приведенное активное сопротивление обмотки ротора R2' 0,0077
приведенное индуктивное сопротивление обмотки ротора Х2' 0,083
эквивалентная
индуктивность намагничивания
 0,0111
0,0111
индуктивности
рассеянья статора и ротора:
 ,
,

Соберём модель двигателя (при непосредственном питании от сети переменного тока 380В) в Matlab в Simulink:
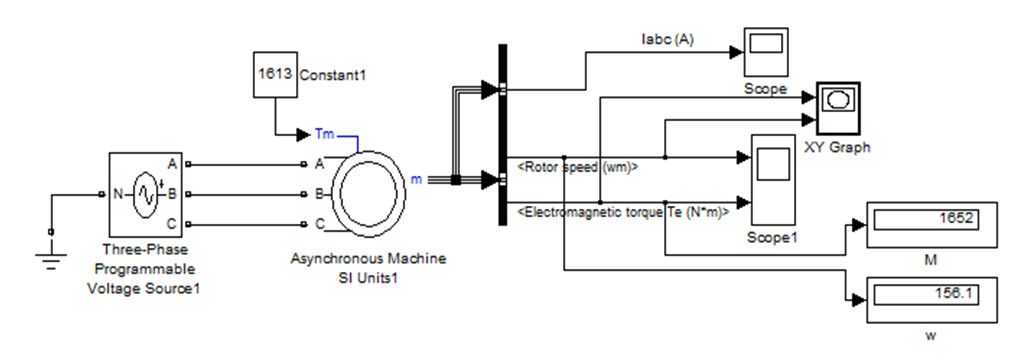
Рассчитанные параметры схемы замещения вводим в блок, являющийся моделью асинхронного электродвигателя с короткозамкнутым ротором:
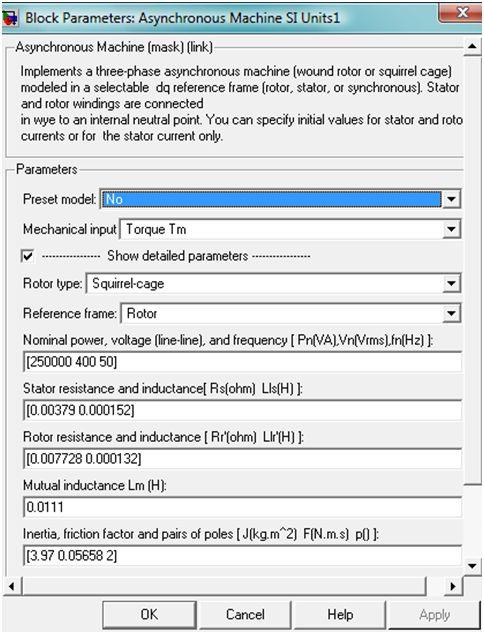
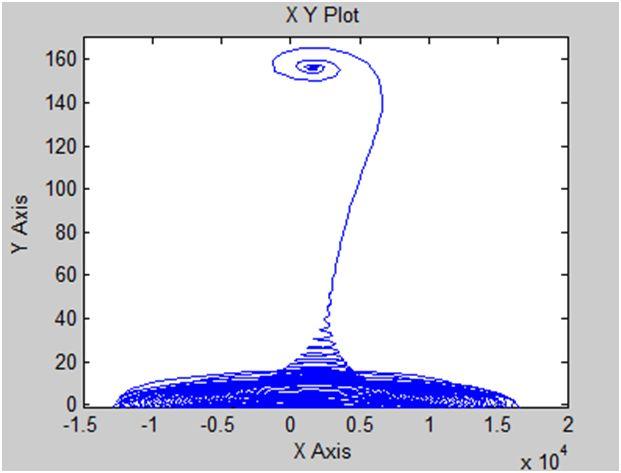
Получим следующие характеристики двигателя:
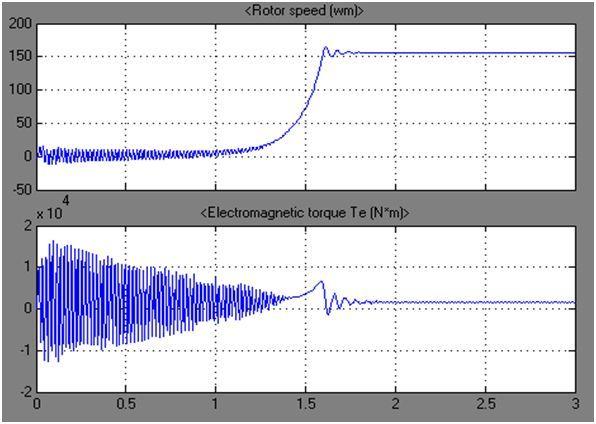
M(w):
Задание 7. Проверка выбранного электродвигателя по тепловому движению при работе и при пуске
Мощность выбранного электродвигателя по условиям нагревания, когда время пуска соизмеримо со временем работы при кратковременной нагрузке, проверяется по соотношению:
или

 (2.106)
(2.106)
Здесь
 ,
,
 ,
(2.107)
,
(2.107)
где Рп – фиктивная пусковая мощность, Рп = Рн iп, кВт; tп, tp –продолжительность пуска электродвигателя и работы, с; Iп, Iр – соответственно пусковой и рабочий ток электродвигателя, А.
 ,
(2.108)
,
(2.108)
здесь Iн – номинальный ток электродвигателя, А:
 .
(2.109)
.
(2.109)
При расчете коэффициента тепловой перегрузки учитывается и время пуска, т.е:
 ,
(2.110)
,
(2.110)
 .
(2.111)
.
(2.111)
Постоянная времени нагрениия TH мин, рассчитывается по формуле:
, (2.112)
где
m – масса выбранного электродвигателя,
кг; н
– номинальное превышение температуры
обмотки статора элетродвигателя. Для
класса изоляции А –
 ;
для Е –
;
для Е –
 ;
В –
;
В –
 ;
F –
;
F –
 ;
Н –
;
Н –
 .
.
Электродвигатели серии 4А с высотой оси вращения 50 – 132 мм имеют класс изоляции В, с высотой оси вращения 160 – 355 мм – F.
При повторно–кратковременном режиме работы мощность выбранного двигателя по условиям нагревания проверяется по соотношению:
 или
(2.113)
или
(2.113)
где
 ,
(2.114)
,
(2.114)
 .
(2.115)
.
(2.115)
Пример 2.10. ДПТ типа 2ПФ 200 имеет паспортные данные: Рном = 30 кВт; nном = 2200 об/мин; Iном = 74 A; Uном = 440 В; ηном = 90%.
Оценить тепловой режим двигателя при его работе по следующему циклу: время первого участка t1 = 12 мин, момент нагрузки Mc1 = 120 Н·м; время второго участка t2 = 25 мин, момент нагрузки Мс2 = 145 Н·м; время третьего участка t3 = 18 мин, момент нагрузки Мс3 = 100 Н·м. Ток возбуждения и сопротивление якорной цепи не изменяются. Заданный цикл относится к продолжительному режиму работы с переменной нагрузкой.
Решение.
Так как ток возбуждения и сопротивление цепи якоря не изменяются, то для проверки двигателя по нагреву можно воспользоваться методом эквивалентного момента.
Определим номинальные угловую скорость и момент двигателя:
 (2.116)
(2.116)
 (2.117)
(2.117)
Рассчитаем эквивалентный среднеквадратичный момент нагрузки двигателя:
 (2.118)
(2.118)
Сопоставим рассчитанный эквивалентный момент Мэкв с номинальным. Так как Мэкв = 126,4 < Мном = 130,3 Н·м, то двигатель не будет перегреваться выше допустимого уровня.