

Пример 2.10. Рассчитать и построить механическую характеристику электродвигателя. Определить фактическое и допустимое число пусков привода в час
Критическое скольжение, соответствующее максимальному вращающему моменту электродвигателя определяем по формуле

где m1 – коэффициент, равный отношению кратности максимального и кратности пускового моментов:

Синхронная частота

Номинальное скольжение электродвигателя

Параметр q может быть определен по соотношению

Механическая характеристика электродвигателя Мд (ω) рассчитывается по формуле Клосса:

где s – текущее скольжение;
Время разбега и торможения системы под нагрузкой и на холостом ходу может быть определено на основе уравнения движения электропривода

где Мизб – избыточный момент системы, Нм.
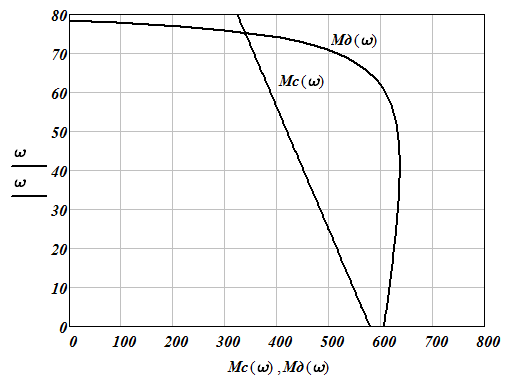
Рисунок 5. Механическая характеристика двигателя Мд(ω) и механическая характеристика момента сопротивления Мс(ω).
Время полного разбега и время торможения возьмем из пункта 2
При повторно–кратковременном режиме электродвигатель сильно нагревается из-за повышенных потерь в период пуска. Чтобы это предотвратить, необходимо выполнить условие

где h – число включений электродвигателя в час;
hдоп – допустимое число включений электродвигателя в час.
Число включений электродвигателя в час, h определяется по формуле

где tp и t0 – соответственно продолжительность работы и паузы, мин.
Допустимое число включений электродвигателя в час, исходя из условий допустимого нагревания, рассчитывается по формуле

где ΔРн – номинальные электрические потери мощности электродвигателя, Вт; Ан – потери энергии при пуске электродвигателя, Дж., βо - коэффициент ухудшения теплоотдачи, принимаем для самовентилируемых двигателей 0.55;
Номинальные электрические потери мощности электродвигателя

где α – коэффициент, равный отношению постоянных потерь мощности электродвигателя к переменным (α = 0,5 – 0,6);
ηн - КПД двигателя при номинальной нагрузке, примем 0.83.
Потери энергии при пуске электродвигателя ΔАп

где iп – кратность пускового тока электродвигателя, для асинхронного двигателя с фазным ротором принимаем равным 2.
Вывод: по результатам расчета число допустимых включений в час равно фактическому числу включений в час, следовательно электродвигатели не будут перегреваться.
6.1 Исследование в динамических режимов работы эп
6.1.1 Математическая модель привода. Для определения характера прохождения переходных процессов системы в переходных режимах необходимо определить коэффициенты характеристического уравнения системы в операторной форме:
 ,
(5.1)
,
(5.1)
где ТМ – механическая постоянная времени системы, ТЭ – электромагнитная постоянная времени;
Определить постоянные времени можно с помощью следующих выражений:
 (с); (5.2)
(с); (5.2)
 (с), (5.3)
(с), (5.3)
где
 (рад/с).
(рад/с).
 (с),
(с),
 ,
,
а это значит, что переходные процессы в системе должны иметь колебательный характер.
6.2. Выбор модели и моделирование переходных процессов. Для моделирования ЭП используется система MatLab (матричная лаборатория) с расширением (Toolboxes). Основными пакетами расширения, используемыми для исследовании ЭП, являются Simulink и Power System Blockset.
В исследуемую модель (рис. 5.1) вошли такие элементы:
Asynchronous Machine SI Unit – модель асинхронного двигателя с номинальными паспортными данными двигателя АМУ 160 М6 Т2;
3 источника синусоидального напряжения AC Voltage Sourse с номинальными параметрами: f=50 Гц, Um=311 В; сдвинутые по фазе друг относительно друга на 1200.
Three-Phase V-I Measurement – трехфазный мультиметр для замеров сетевого тока и напряжения.
2 элемента типа Scope – модели осциллографов для просмотра графиков сетевых тока и напряжения, а также изменения во времени частоты вращения ротора двигателя и момента на его валу.
2 элемента типа Display для контроля установившегося значения тех же параметров.
Step – элемент, с помощью которого, возможно смоделировать наброс нагрузки на вал двигателя в определенный момент времени.
 Рис.5.1.
Модель системы ПЧ-АД для программного
пакета MatLab
Рис.5.1.
Модель системы ПЧ-АД для программного
пакета MatLab
Моделируем
пуск двигателя без нагрузки при трех
различных частотах питающего напряжения
f1=50 Гц, f2=37,5
Гц, f3=25 Гц, используя
закон частотного регулирования
 .
.
При f=50 Гц Uл=380 В; при f=37,5 Гц Uл=329 В; при f=25 Гц Uл=269 В.
При частоте питающей сети f=50 Гц и линейном напряжении Uл=380 В получаем следующие графики переходных процессов ω=f(t) (рад/с) и Mв=f(t) (Н·м).

Рис. 5.2. Графики ω=f(t) и Mв=f(t) при f=50 Гц
После окончания переходного процесса получаем такие установившиеся значения:
ω =104,7 рад/с; I1=7,266 А; Mв=0,517 Н·м
При частоте питающей сети f=37,5 Гц и линейном напряжении Uл=329 В получаем следующие графики переходных процессов ω = f(t) (рад/с) и Mв = f(t) (Н·м).

Рис. 5.3. Графики ω=f(t) и Mв=f(t) при f=37,5 Гц
После окончания переходного процесса получаем такие установившиеся значения: ω =78,53 рад/с; I1=7,608 А; Mв=0,3883 Н·м
При частоте питающей сети f=25 Гц и линейном напряжении Uл=269 В получаем следующие графики переходных процессов ω=f(t) (рад/с) и Mв=f(t) (Н·м).

Рис. 5.4. Графики ω=f(t) и Mв=f(t) при f=25 Гц
После окончания переходного процесса получаем такие установившиеся значения: ω =52,36 рад/с; I1=10,29 А; Mв=0,036 Н·м
При частоте питающей сети f=50 Гц и линейном напряжении Uл=380 В смоделируем переход системы из одного установившегося состояния (Мв = Мн = 73 Н·м, ω = ωн = 101.7 рад/с, I1 = I1н = 15,65 А) в другое после наброса нагрузки на вал двигателя (Мс.доп.= 0,3Мн = 22 Н·м).

Рис. 5.5. Наброс нагрузки Мс.доп.=0,3Мн
После окончания переходного процесса получаем такие установившиеся значения: ω =99,7 рад/с; I1=20,06 А; Mв=95,5 Н·м
Для более детального изучения переходного процесса на рис. 5.6. приведена увеличенная часть графиков ω=f(t) (рад/с) и Mв=f(t) (Н·м), охватывающая только момент замедления двигателя после наброса дополнительной нагрузки.

Рис. 5.5. Наброс нагрузки Мс.доп.=0,3Мн (фрагмент)