

Функциональная схема цифровой системы, рис. 1.10.

Рис 1.10
Методика перехода от функциональных схем к структурным та же, что и для непрерывных систем, однако надо учитывать свойства ИЭ, ДФ и Э.
1.3 Дискретные фильтры
На вход ДФ –
поступает последовательность
модулированных
![]() -функций.
В соответствии с алгоритмом управления
ДФ изменяет закон модуляции
последовательности входных импульсов,
не изменяя дискретный характер. Выходом
ДФ является последовательность
-функций.
ДФ в виде эквивалентной структурной
схемы, состоящей из непрерывного звена
с передаточной функцией
-функций.
В соответствии с алгоритмом управления
ДФ изменяет закон модуляции
последовательности входных импульсов,
не изменяя дискретный характер. Выходом
ДФ является последовательность
-функций.
ДФ в виде эквивалентной структурной
схемы, состоящей из непрерывного звена
с передаточной функцией
![]() ,
на выходе – ИИЭ2,
работающим синхронно с входным ИИЭ1.
Время, затрачиваемое на вычисления,
мало по сравнению с периодом дискретности
,
на выходе – ИИЭ2,
работающим синхронно с входным ИИЭ1.
Время, затрачиваемое на вычисления,
мало по сравнению с периодом дискретности
![]() ,
рис. 1.11.
,
рис. 1.11.

Рис. 1.11
Экстраполятор
– устройство, предназначенное для
преобразования выходного сигнала ДФ в
непрерывную величину, поступающую на
вход НЧ. Экстраполяция сводится к
построению непрерывной функции времени,
значения которой близки для
![]() к значениям дискретного сигнала на
выходе ДФ. Простейший способ преобразования
- запоминание значений дискретного
сигнала на всем периоде дискретности
к значениям дискретного сигнала на
выходе ДФ. Простейший способ преобразования
- запоминание значений дискретного
сигнала на всем периоде дискретности
![]() .
Чаще всего выходные данные ЭВМ
преобразуются в последовательность
прямоугольных импульсов единичной
скважности, рис. 1.12. При этом передаточная
функция Э эквивалентна ФЭ, т.е.
.
Чаще всего выходные данные ЭВМ
преобразуются в последовательность
прямоугольных импульсов единичной
скважности, рис. 1.12. При этом передаточная
функция Э эквивалентна ФЭ, т.е.
 - передаточная
функция экстраполятора нулевого порядка.
- передаточная
функция экстраполятора нулевого порядка.
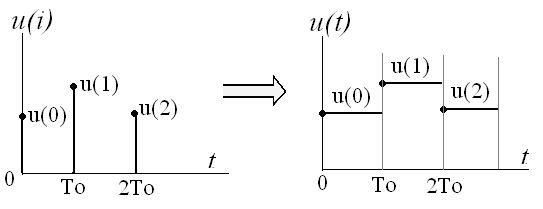
Рис. 1.12
Эквивалентная схема цифровой системы управления, рис. 1.13.

Рис. 1.13
Если коррекция
осуществляется с помощью непрерывных
устройств, то
![]() .
.
Исследование
дискретной САУ можно приближенно свести
к исследованию эквивалентной непрерывной
системы, в которой совмещенность ИЭ и
Э заменяется непрерывным звеном с
передаточной функцией
![]() и сумматором, на который помимо основного
сигнала поступает помеха от эффекта
квантования по времени входного сигнала,
рис. 1.14.
и сумматором, на который помимо основного
сигнала поступает помеха от эффекта
квантования по времени входного сигнала,
рис. 1.14.
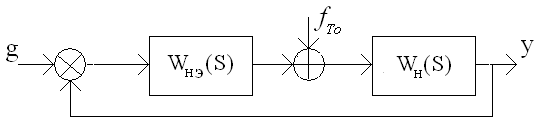
Рис. 1.14
ДФ изменяет закон модуляции, рис. 1.15.

Рис. 1.15
1.4 Функциональная и алгоритмическая структуры амплитудно-импульсной системы
В общем случае импульсный элемент может входить в состав любого функционального блока системы управления. Дискретный характер работы системы может быть обусловлен, например, использованием датчика периодического действия (различные анализаторы состава вещества). Но в большинстве случаев дискретность системы связана с наличием в ее контуре коммутирующих устройств МП и ДМП, которые периодически замыкают и разрывают цепь регулирования.
Рассмотрим типичную функциональную структуру импульсной системы (рис. 1.16, а). К такой структуре могут быть сведены почти все случаи включения импульсного элемента. Импульсные элементы ИЭ1 и ИЭ2, которые реально находятся в задатчике и обратной связи, могут быть учтены одним импульсным элементом ИЭ.

Рис. 1.16 Функциональная (а) и алгоритмическая (б) структуры амплитудно-импульсной системы управления
Импульсный элемент
ИЭ, осуществляющий в системе квантование
по времени, можно рассматривать как
амплитудно-импульсный модулятор
(рис. 1.16, а). Модулятор умножает несущий
сигнал — последовательность одинаковых
импульсов, поступающих с генератора
импульсов ГИ, на модулирующий сигнал —
входной непрерывный сигнал
![]() .
Образующийся при этом на выходе
дискретный сигнал
.
Образующийся при этом на выходе
дискретный сигнал
![]() представляет собой последовательность
импульсов, амплитуды которых равны или
пропорциональны мгновенным значениям
непрерывного сигнала.
представляет собой последовательность
импульсов, амплитуды которых равны или
пропорциональны мгновенным значениям
непрерывного сигнала.
Для упрощения анализа системы с АИМ целесообразно реальный импульсный элемент ИЭ заменить эквивалентным последовательным соединением идеального импульсного элемента ИИЭ и формирующего элемента ФЭ (рис. 1.17, б). Идеальный импульсный элемент преобразует непрерывный сигнал в последовательность мгновенных равноотстоящих друг от друга импульсов, площади которых равны значениям входного сигнала в дискретные моменты времени. Формирующий элемент или демодулятор образует из мгновенных импульсов такие импульсы, которые по форме совпадают с импульсами на выходе реального импульсного элемента.
Реакция формирующего
элемента на единичный импульс, т. е. на
дельта-функцию, есть весовая функция
![]() этого элемента. Поэтому передаточная
функция формирующего элемента:
этого элемента. Поэтому передаточная
функция формирующего элемента:
 , (1.1)
, (1.1)
где
![]() - функция, описывающая импульс на выходе
реального импульсного элемента при
действии на входе дельта-функции.
- функция, описывающая импульс на выходе
реального импульсного элемента при
действии на входе дельта-функции.
Формирующий элемент является звеном непрерывного действия, и его при анализе удобно объединять с непрерывной частью системы (см. рис. 1.16, б).
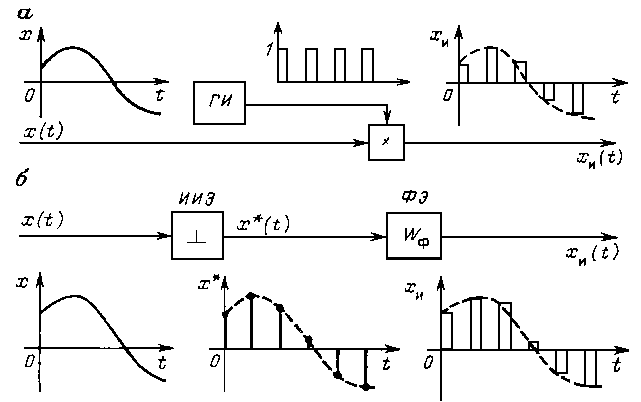
Рис. 1.17 Алгоритмическая структура импульсного элемента
Образующееся при этом соединение называется приведенной непрерывной частью системы. Передаточная функция приведенной непрерывной части.
![]() . (1.2)
. (1.2)
В наиболее часто
встречающемся случае, когда несущие
импульсы имеют прямоугольную форму,
формирующий элемент должен преобразовать
единичную дельта-функцию в прямоугольный
импульс с единичной высотой и длительностью
![]() ,
где
,
где
![]() — скважность или относительная
длительность. Такой импульс можно
представить в виде разности двух
ступенчатых функций, сдвинутых на время
,
т. е.
— скважность или относительная
длительность. Такой импульс можно
представить в виде разности двух
ступенчатых функций, сдвинутых на время
,
т. е.
![]() .
(1.3)
.
(1.3)
Отсюда, согласно (1.1), передаточная функция формирующего элемента
 (1.4)
(1.4)
Если длительность
импульсов
,
времени существенно меньше основных
постоянных времени остальных звеньев
непрерывной части системы, то
формирующий элемент (1.4) может быть
приближенно заменен безинерционным
звеном
![]() .
.

Рис. 1.18 Простейший квантователь и фиксатор.
При
![]() формирующий элемент (1.4) выдает в течение
всего периода повторения Т
постоянный сигнал, равный значению
входного сигнала в начале периода
Т.
Поэтому в данном частном (но распространенном)
случае формирующий элемент называется
фиксирующим или запоминающим. Передаточная
функция фиксирующего элемента
формирующий элемент (1.4) выдает в течение
всего периода повторения Т
постоянный сигнал, равный значению
входного сигнала в начале периода
Т.
Поэтому в данном частном (но распространенном)
случае формирующий элемент называется
фиксирующим или запоминающим. Передаточная
функция фиксирующего элемента
 .
(1.5)
.
(1.5)
Так как фиксацию мгновенного значения сигнала на постоянном уровне можно рассматривать как простейшую экстраполяцию — экстраполяцию полиномом нулевого порядка, то формирующий элемент в указанном частном случае ( ) называется также экстраполятором нулевого порядка.
В качестве простейшего примера рассмотрим последовательно соединенные квантователь по времени К и запоминающий элемент ЗЭ, а также сигналы в этой цепи (рис. 1.18).
Так как квантователь
по времени и запоминающий элемент
являются важными частями дискретной
системы, существенно влияющими на
ее динамику, проанализируем их частотные
свойства. Квантователь по времени или
идеальный импульсный элемент можно
рассматривать как генератор дополнительных
гармоник, частота которых равна частоте
дискретизации
![]() .
Спектр
.
Спектр
![]() сигнала
сигнала
![]() ,
квантованного по времени по принципу
АИМ, равен следующей сумме смещенных
спектров непрерывного входного сигнала
:
,
квантованного по времени по принципу
АИМ, равен следующей сумме смещенных
спектров непрерывного входного сигнала
:
 ,
(1.6)
,
(1.6)
где
![]() —
спектр входного (квантуемого) сигнала
(рис. 1.19, а). Очевидно, что при квантовании
амплитуды всех гармоник уменьшаются
в Т
раз. Это означает, что импульсный элемент
эквивалентен по своим свойствам
безынерционному звену с передаточным
коэффициентом 1/T.
—
спектр входного (квантуемого) сигнала
(рис. 1.19, а). Очевидно, что при квантовании
амплитуды всех гармоник уменьшаются
в Т
раз. Это означает, что импульсный элемент
эквивалентен по своим свойствам
безынерционному звену с передаточным
коэффициентом 1/T.
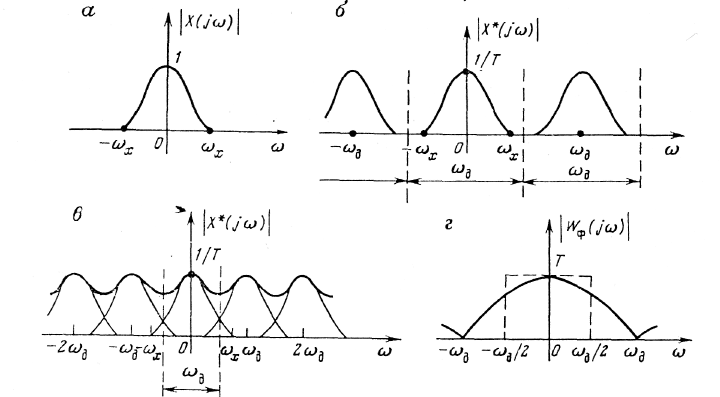
Рис. 1.19 Амплитудные спектры входного и выходного сигналов идеального квантователя и а.ч.х. фиксатора
В общем случае спектр существенно отличается от спектра : он содержит как основную составляющую (k = 0), совпадающую с , так и дополнительные составляющие (k = 1; 2; . . .), возникающие при квантовании.
Если ширина спектра
квантуемого сигнала
![]() ,
то дополнительные составляющие в
основном диапазоне частот
,
то дополнительные составляющие в
основном диапазоне частот
![]() не искажают форму спектра
(рис. 1.19, б), т. е.
не искажают форму спектра
(рис. 1.19, б), т. е.
![]() . (1.7)
. (1.7)
Если частота
квантования недостаточно велика и
![]() ,
то в основном диапазоне спектр
искажается прилегающими составляющими
с k
± 1 (рис. 1.19, в).
,
то в основном диапазоне спектр
искажается прилегающими составляющими
с k
± 1 (рис. 1.19, в).
Таким образом, на основе проведенных физических рассуждений можно сформулировать теорему о квантовании:
если непрерывный
сигнал обладает спектром, ограниченным
частотой
![]() ,
то его квантование по времени с частотой
,
то его квантование по времени с частотой
![]() не приводит к потере информации, т. е.
сигнал однозначно и полностью
представляется своими дискретными
значениями, взятыми через интервал
квантования
не приводит к потере информации, т. е.
сигнал однозначно и полностью
представляется своими дискретными
значениями, взятыми через интервал
квантования
 .
.
Строгое доказательство этой теоремы было дано советским ученым-радиотехником В.А. Котельниковым в 1933 г. и американским математиком К. Шенноном в 1949 г.