

Глава 1. Тенденції розвитку автомобільного устаткування
такого стартера узгоджується з пусковим моментом ДВС у вигляді планетарного редуктора (редуктора Джеймса). Давно немає колекторних генераторів постійного струму, їх замінили багатофазні синусоїдальні генератори з напівпровідниковими випрямлячами і електронними регуляторами напруги. Але такі генератори можуть істотно видозмінитися у разі другого робочого напруги або якщо потреба у високовольтній перемінній напрузі стане реальної.
Ведуться також розробки але створенню універсальної електричної машини, з так званого «стартер-генератора», що зможе виконувати дві функції: запуск ДВС і подачу електроенергії у борт система після запуску ДВС.
► Сучасна мікропроцесорна система запалювання з низько рівним багатоканальним розподілом енергії по свічам [2] є найбільш досконалим рішенням проблеми примусового електроіскрового запалення ТВ-суміші в циліндрах поршневого ДВС.
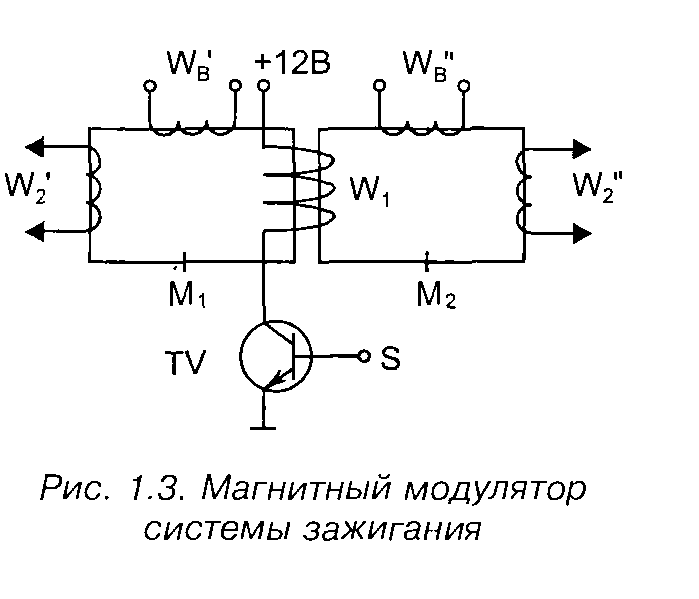
Рис 1.3 магнітний модулятор
Системи запалювання
Але це межа досягнень. Вже випробувані лазерні свічки запалювання, які працюють безпосередньо від електронної схеми управління без проміжного енергонакопичувачі. Це дозволить значно підвищити ■ ' надійність і ККД системи запалювання, а також позбавити його від високочастотних електроіскрових перешкод інші вузли і блоки бортовий електронної автоматики. Електронної схемою управління може бути магнітний модулятор стискування, працюючий на феромагнітних осердях насичення. Схема такого модулятора рис., /.із. Магнітний модулятор показано на рис. 1.3, основний елемент в системи запалювання якої є високовольтний трансформатор з насиченими сердечниками.
Якщо магнітопроводу трансформатора вводити на режим насичення, його коефіцієнт трансформації різко надає і енергія з первинної обмотки у вторинну не трансформується.
Вихідний трансформатор має дві ізольованих друг від друга магнітопроводу — М, і М2, охоплених загальної первинної обмоткою XV,. Кожен магнітопроводу оснащений окремої обмоткою управління (XV,/ і XV,,") і окремої двох вивідний вторинної обмоткою ^2' і \У2").
Коли керуючої обмотці XV,,' протікає струм, достатній насичення сердечника М,, а обмотка \УВ" обеструмленнанна, то високу напругу наводитимуть лише у вторинної обмотці XV2". Якщо знеструмити управляючу обмотку V/,,' і пропустити струм насичення по обмотці XVв", то насититься сердечник М2 і високу напругу буде трансформоване лише у обмотку XV,'.
Система запалювання з трансформатором насичення має високої надійністю, малими габаритами і вагою.
На закінчення треба сказати, що не відомі розробки бортових систем вийшли з стадії експериментальних досліджень. Їх використовують здебільшого фірмових моделях спортивних і концептуальних автомобілів. Але, як й раніше, майже всі новації, випробувані на концепт карах, рано чи пізно починають застосовуватися на серійних автомобілях.
Такі тенденції розвитку автомобільної техніки і зокрема, систем бортового електричного, електронного і авто тронного устаткування.
Глава 2. Датчики новітніх автомобільних електронних систем
2.1. Попередні зауваження
Сучасні електронні системи автоматичного управління (ЭСАУ) різними технічними об'єктами, зокрема і автомобільними бортовими пристроями, мають подібну структуру.
Різні датчики ЭСАУ перетворять інформацію про значеннях контрольованих неелектричних параметрів в електричний сигнал — напруга, струм, частоту, фазу тощо. буд. Ці сигнали перетворюються на цифровий код і чинять в мікроконтролер. Мікроконтролер па підставі значень цих сигналів і згідно з закладених у нього програмним забезпеченням приймає рішення, управляє через виконавчі механізми (реле, соленоїди, електродвигуни) об'єктом.
Можливість вдосконалення автомобільних електронних систем великою мірою залежить від наявності надійних, точних і недорогих датчиків.
У 60-ті роки автомобілі було обладнано датчиками тиску олії, рівня палива, температури, охолоджувальної рідини. Їх виходи було залучено до стрілочним чи ламповим індикаторами на щитку приладів.
У 1970-х роках автомобільні компанії влилися в боротьбу за зменшення кількості токсичних викидів з глушника автомобіля — знадобилися б додаткові датчики керувати силовий установкою, що необхідні забезпечення нормальної роботи електронного запалювання, системи впорскування палива, трьохкомпонентного нейтралізатора, для точного завдання співвідношення повітря/паливо у робітничій суміші, для мінімізації токсичності вихлопних газів.
У 1980-х роках почали приділяти більше уваги безпеки водія і пасажирів — з'явилися анти блокувальна система гальмування (АВ5) і повітряні мішки безпеки.
У силовому агрегаті (в ДВС) датчики йдуть на виміру температури і тиску більшості мінливих середовищ (температура всмоктуваного повітря, абсолютне тиск у впускному колекторі, тиск олії, температура охолоджувальної рідини, тиск палива на системі впорскування).
Майже всім які йшли частинам автомобіля підключені датчики швидкості або військового стану (швидкість автомобіля, становище дросельної заслінки, становище колінчатого валу, становище розподільного валу, ситуацію і швидкість обертання валу в коробці перемикання передач, становище клапана рециркуляції вихлопних газів).
Інші датчики визначають рівень детонації, навантаження двигуна, пропуски запалення, зміст кисню в вихлопних газах.
У системи управління кліматом (в клімат-контролі) використовуються різні датчики в кондиціонері визначення тиску і температури холодаента, температури повітря на салоні і поза бортом.
2.1. Попередні зауваження
Є датчики, які визначають становище сидінь.
Після появи анти блокувальною системи гальмування і необхідність активної підвіски знадобилися датчики визначення швидкості обертання коліс, висоти кузова стосовно шасі, тиску в шинах.
Датчики удару й акселерометри потрібні для правильного функціонування фронтальних і бічних повітряних мішків безпеки. Для переднього пасажирського сидіння з допомогою датчиків визначають наявність пасажира, його вага. Цю інформацію використовується для оптимального надуву мішка безпеки на передньому сидінні. Інші датчики йдуть на бічних і стельових повітряних мішків безпеки, і навіть спеціальних повітряних мішків для захисту шиї і голови.
На сучасних автомобілях антиблокуючі системи гальмування замінюються складнішими і ефективними системами управління стабільністю руху автомобіля. Виникає необхідність системи у нових датчиках. Розробляються вже є датчики швидкості обертання автомобіля навколо вертикальної осі, датчики попередження сутичок (наприклад радарні), датчики визначення близькості інших автомобілів, датчики становища рульового колеса, бічного прискорення, швидкості обертання кожного колеса, крутного моменту на валу двигуна тощо. буд. Управління гальмівний системою автомобіля стає частиною більш загальній й ефективної системи електронного управління курсової сталістю і стабільністю руху.
З сказаного ясно, що сьогодні датчики встановлюються практично переважають у всіх системах автомобіля.
На рис. 2.1, а показано найбільш раціональне розташування різних датчиків автомобілем.
► Датчики автомобільних електронних систем можна класифікувати за трьома ознаками: принципу дії, типу енергетичного перетворення і основному призначенню.
Залежно від енергетичного перетворення (рис. 2.1, б) датчики (Д) бувають активними (поз. 2 на рис. 2.1, б), у яких вихідний електричний сигнал (ЕС) виник як слідство вхідного неелектричного впливу (НВ) без докладання сторонньої електричної енергії з допомогою внутрішнього фізичного ефекту (наприклад фотоефекту), і пасивними (поз. 3 на рис. 2.1, б), у яких електричний сигнал (ЕС) наслідком модуляції зовнішньої електричної енергії (ЧЕ) управляючим неелектричним впливом (НВ). Наприклад, потенціометричний датчик, показаний на рис. 2.1, про (поз. 5), є пасивним перетворювачем кута повороту осі потенціометра (чутливого елемента ЧЭ) в електричний сигнал. Електричний сигнал (ЕС) вийде в виході потенціометра тільки тоді, як у резистивну доріжку (П) надійде зовнішнє напруга (ЧЕ). Слід зазначити, що в датчика, у вигляді чутливого елемента (ЧЭ), має місце внутрішнє перетворення зовнішнього неелектронного Бездіяльності (НВ) у проміжний неелектричний сигнал (СР), що показано на рис. 2.1, б (ноз. 1). Що стосується датчику кута повороту, кутовий становище осі потенціометра є неелектричним сигналом (СР) не вдома чуття