

Глава 8. Систему керування курсової сталістю автомобіля
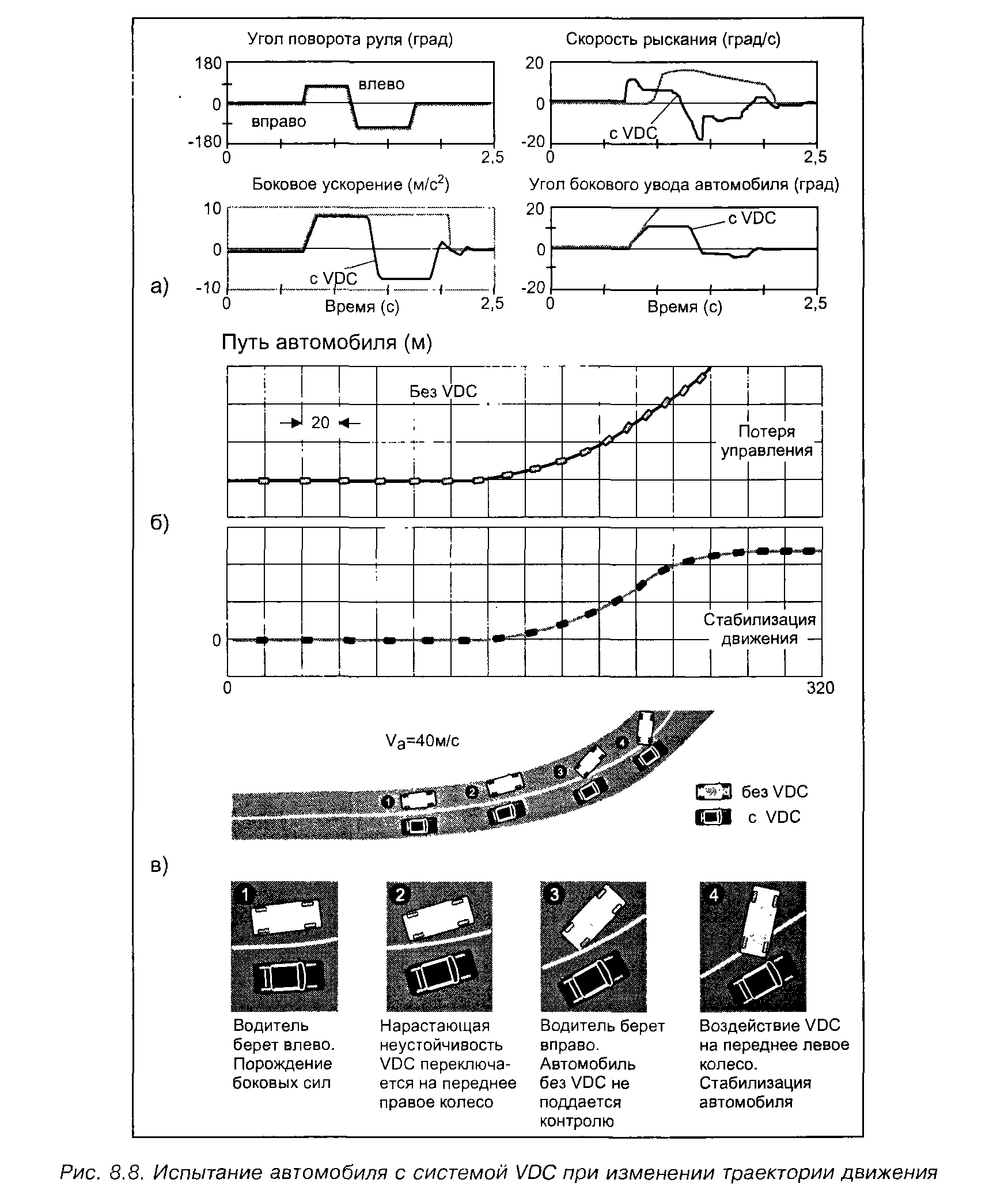
РИС. 8.8. Випробування автомобілі з системою VDC за зміни траєкторії руху
На рис. 8.8, в виділено характерна частина траєкторії руху
автомобілів і результуюча сила кожному колесі в контрольних точках цієї траєкторії. Після першого вхідного впливу поворотом рульового колеса на 90° звичайний автомобіль показує виникає нестійкість (на рис. 8.8, в поз. 2), яка слід через затримки появи бічний сили на задніх колесах (проти передніми). На поз. 3 рис. 8.8, у куток повороту рульового колеса з- 180
8.5. Результати експериментальних досліджень змінюється у протилежному напрямі. Швидкість шастання і кут бічного відведення швидко збільшуються, стабільність автомобіля не відновлюється, і автомобіль продовжує з'їжджати з дороги (поз. 4 на рис. 8.8, в). Після першого вхідного впливу поворотом рульового колеса автомобіль із системою VDC також демонструє певну нестійкість. Та заодно система VDC формує гальмівний момент, прикладений до першого передньому колесу (рис. 8.8, з поз. 2), що зумовлює повороту результуючої сили у цьому колесі як наслідок, — уповільнення зростання швидкості шастання і кута бічного відведення (рис. 8.8, а). Автомобіль утримується від знесення. Після другої вхідного впливу поворотом рульового колеса (рис. 8.8, а) швидкість шастання змінює свого знака, а система VDC формує гальмівний момент лівому передньому колесі і автомобіль знову стабілізується (рис. 8.8, в поз. 4). Моделювання було проведено використанням блоку FASIM (моделювання динаміки автомобіля) [46J. Результати моделювання перевірені на випробувальному автомобілі. 8.5.2. Гальмування на своєму шляху автомобіля по гладкому льоду На рис. 8.9 показані порівняльні характеристики основних параметрів руху автомобіля під час повного гальмування на гладкому льоду (ц ~ 0,15). Випробувальний автомобіль порівнювати було обладнано серійними системами ABS і VDC.
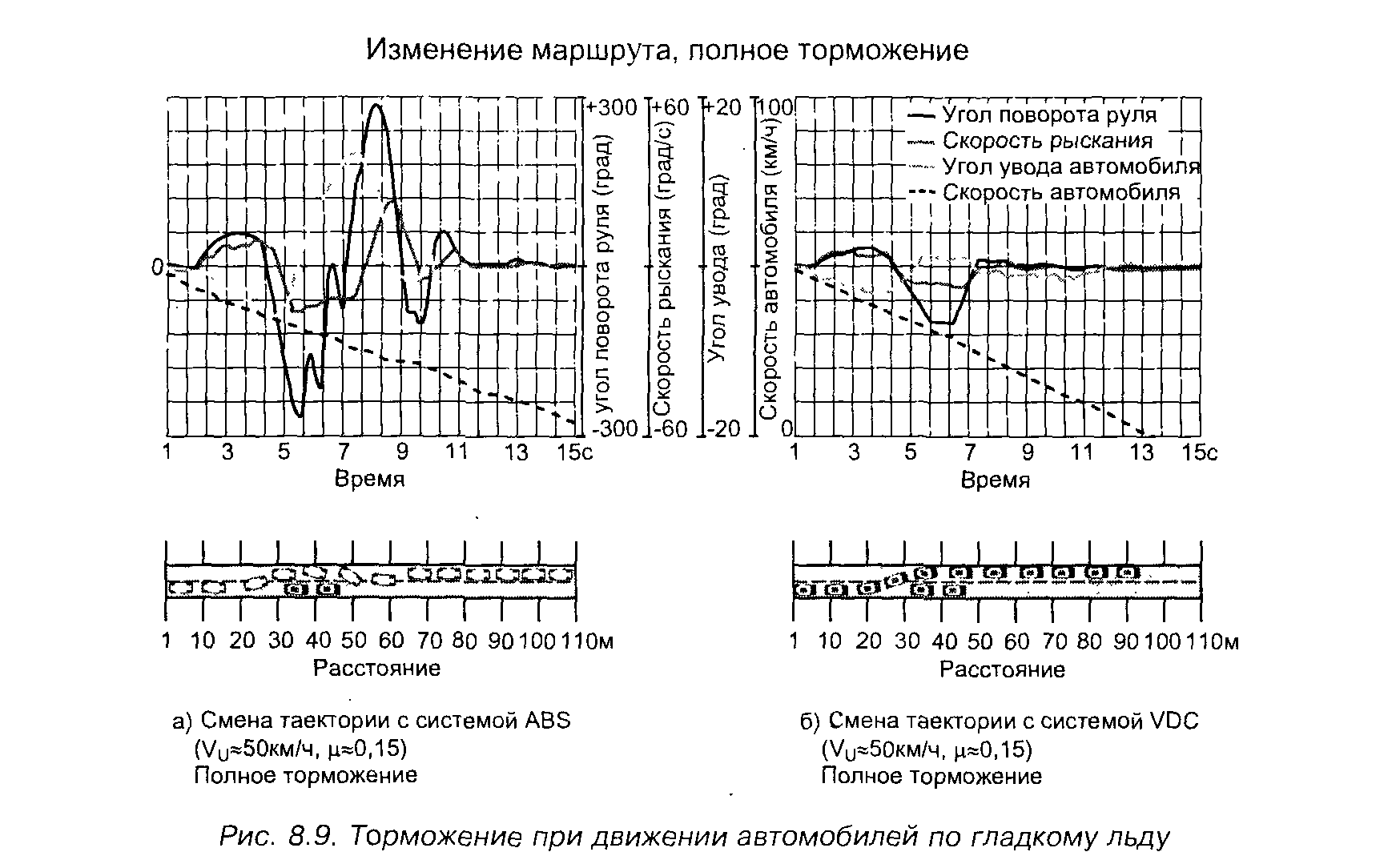
РИС. 8.9. Гальмування на своєму шляху автомобілів по гладкому льоду
На рис. 8.9 зліва показані результати випробувань із системи ABS, справа — із системи VDC. Маневрування проводилося при швидкість руху автомобіля 50 км/год з участю водія під управлінням. Результати випробувань із системи ABS показують, що швидкість шастання і кут бічного відведення автомобіля швидко досягають великих значень 181
Глава 8. Систему керування курсової сталістю автомобіля і водій повинен швидко цьому протидіяти. Після завершення чергового маневру кермом швидкість шастання і кут бічного відведення автомобіля знову швидко змінюються і знову виникла потреба втручання. Результати випробувань із системи VDC показують (рис. 8.9 справа), що швидкість шастання і кут бічного відведення автомобіля під час гальмування змінюються у "малих межах повноважень і негайно відгукуються на маневрування при управлінні рухом. І тут водій повинен встигати ставити додатковий невеличкий кут повороту рульового колеса убік, протилежну уводу, і автомобіль рівномірно зупиняється. Важливо, що заодно гальмівний шлях автомобілі з системою VDC менше, ніж на те ж таки автомобіля і системи ABS. Це обмеженням кута бічного відведення автомобіля, чому відповідає найкраща ABS-регуляція. 8.5,3. Випробування автомобіля на своєму шляху по замкнутої траєкторії зі збільшенням швидкості На рис. 8.10 показані порівняльні значення основних змінних величин під час руху автомобіля по замкнутої траєкторії зі збільшенням швидкості. Випробування проводилися автомобілем і системи VDC (рис. 8.10, чи без системи VDC (рис. 8.10, б). У цьому водій мав утримувати автомобіль на трасі. Траса однорідна, коефіцієнт тертя високий (ц = 1,0). На рис. 8.10 штриховими лініями показані розрахункові значення кута повороту рульового колеса і кута відведення автомобіля, що є граничними залежностями цих величин від повільно дедалі більшого швидкості і одержувачів відповідного бічного прискорення. З рис. 8.10 видно, поведінка автомобілі з системою VDC і VDC ідентично до величини бічного прискорення 7 м/с2 і майже збігаються з розрахунковим. При значеннях бічного прискорення вище 7 м/с2 починає швидко зростати кут відведення автомобіля і кут повороту рульового колеса. Далі при значеннях прискорення 7,5 м/с2 звичайний автомобіль стає некерованою. На автомобілі і системи VDC при значеннях бічного прискорення вище 7 м/с2 включається система VDC, яка, керуючи вутлому повороту дросельної заслінки, зменшує швидкість автомобіля, відповідно, і бічне прискорення до 5 м/с\ У цьому кут відведення автомобіля і кут повороту рульового колеса зменшуються відповідно до характеристиками на рис. 8.10, чи автомобіль залишається керованим. "!яким чином, динамічний діапазон функціонування системи VDC лежить не більше значень бічного прискорення від 7 м/с2 до 5 м/с2 (відповідно до рис. 8.10, а). Виникаючі внаслідок дії системи VDC незначні результуючі зміни кута бічного відведення автомобіля та її бічного відхилення від траси легко коригуються діями водійського управління, що зумовлює стійкого руху автомобіля по замкнутої траєкторії. Вищеописані варіанти руху автомобіля потенційно містять загрозою зриву опинилися коліс в бічний юз і є частими причинами ДТП для автомобілів, не обладнаних системою VDC. Проте за практиці можуть відбуватися та інші аварійно-небезпечні варіанти руху, наприклад, так званий «слалом» на засніженої автомагістралі, коли автомобіль великій швидкості
8.5. Результати експериментальних досліджень Збільшення швидкості руху на повороті
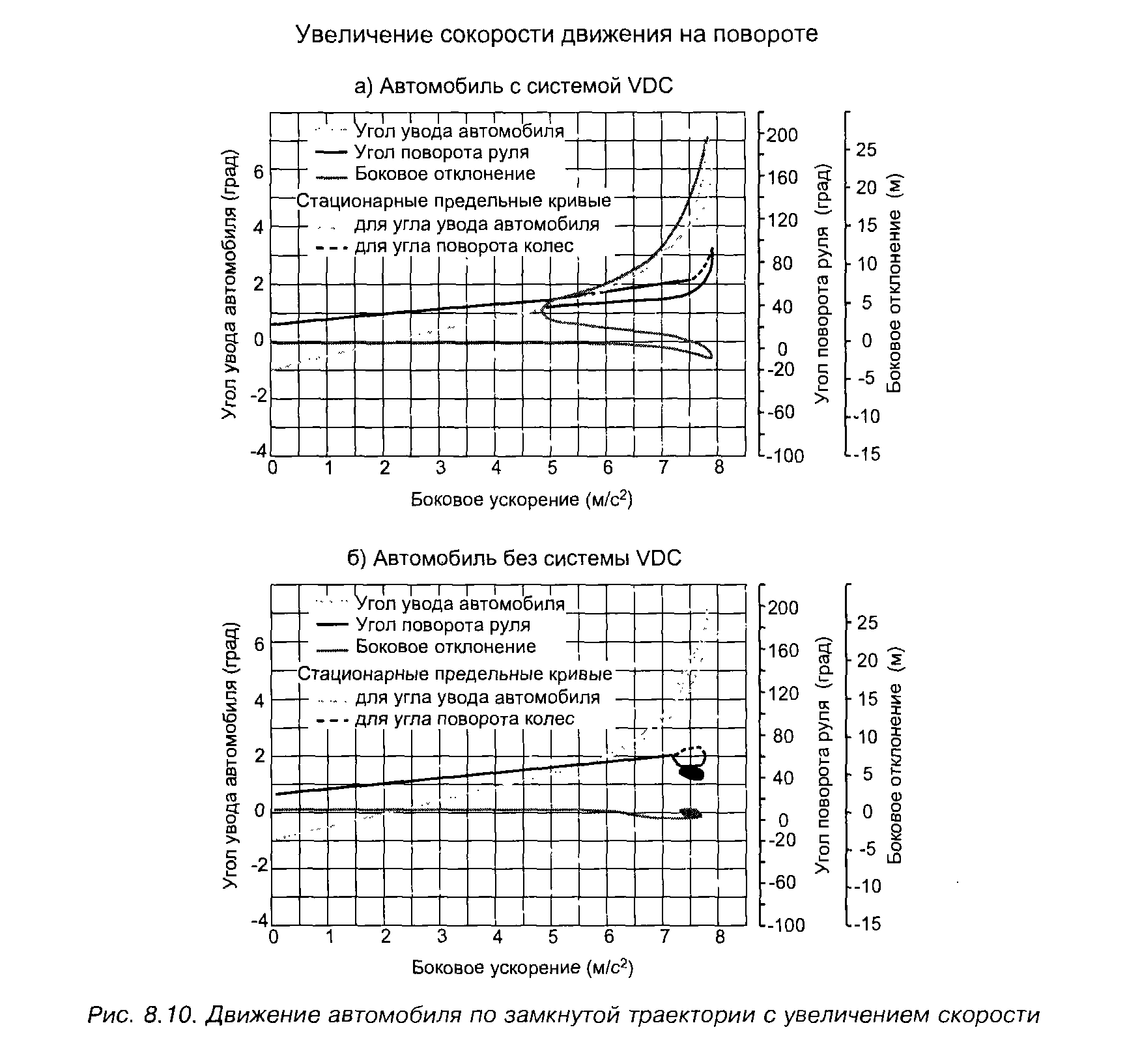
РИС. 8.10. Рух автомобіля по замкнутої траєкторії зі збільшенням швидкості
заносить з боку убік. Випробування автомобілі з системою VDC під час руху слаломом описані у [35]. 8.6. Надійність системи VDC. Пошук несправностей Підвищена надійність і бортова саме діагностика несправностей як окремих компонентів, і всієї системи загалом забезпечують безпечну експлуатацію системи VDC. Підвищення надійності роботи накладає додаткових вимог терміном служби компонентів, на процес їх виробництва, на функціональні взаємозв'язку між компонентами, на методи діагностування несправностей у системі. Багато писемних джерел несправностей повинні прагнути бути локалізовано своєю практикою чи зменшено можливість, що несправності відбудуться.