

Глава 8. Систему керування курсової сталістю автомобіля
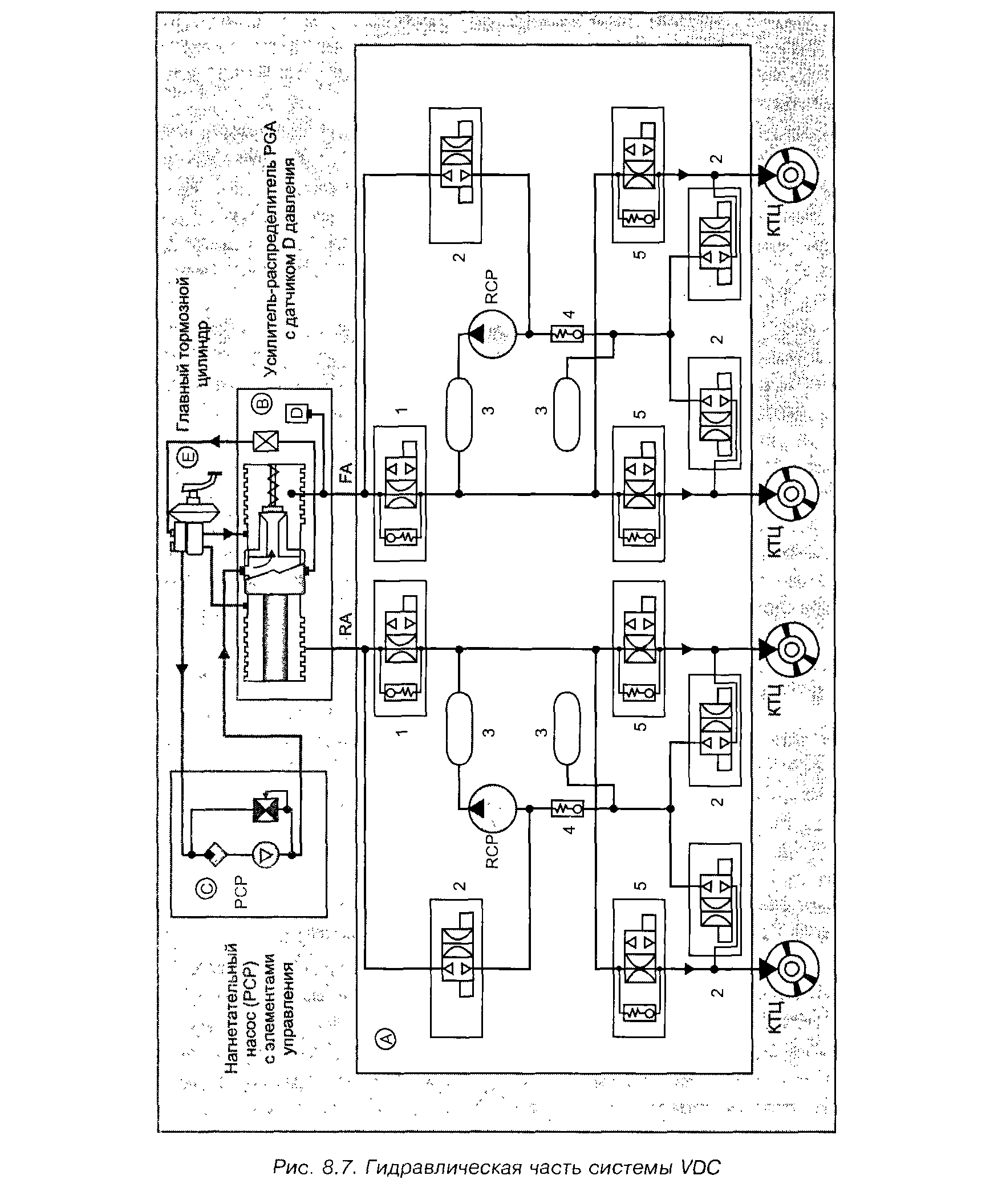
РИС. 8.7. Гідравлічна частина системи VDC
У цьому два плунжера в РОЛ починають розгортатися і нагнітають гальмівна рідина p.s насоси рециркуляції RCP під заданим тиском, яке пружинними М і 4) і електричними (2) клапанами і підтримується ресиверами (3). Це спричиняє з того що потік рідини, що йде від RCP,
S.5. Результати експериментальних досліджень подається в робочі контури FA і RA під тиском, що є нормальним для стійкого функціонування системи VDC при низьких температурах. Із міркувань функціональної надійності і експлуатаційної безпеки системи VDC головний поставка насос RCP постачає гальмівний рідиною насоси рециркуляції RCP через буферні камери диференціального гідро підсилювача PGA. Електричні гідроклапани 2 і п'яти можуть відпрацьовувати дві програми автоматичного управління тиском в колісних гальмівних циліндрах (КТЦ) — програму ABS (гальмування без блокування коліс) і програму VDC (курсової стійкості руху автомобіля виборчим приторможуванням коліс з одночасним регулюванням крутного моменту двигуна). Ці програми зберігаються у постійному запам’ятовувальним устрої (в ПЗУ) електронного блоку управління. 8.4.4. Електронний блок управління Електронний блок управління (ЭБУ) містить стандартну чотирьохшарову друковану плату з цими двома частково резервними мікроконтролерами 83C196KL. Кожен контролер оснастили блоком ПОСТІЙНОЇ пам'яті обсягом 48 кілобайтів. На платі також установлено всіх які запускають і комутуючі устрою для включення каналів управління і контрольних ламп, напівпровідникові реле на шляху подання харчування на потужні електроспоживачі (гідро клапани і нагнітальні насоси), ланцюга CAN інтерфейсу. У зв'язку з збільшенням кількості управляючих сигналів САК інтерфейс інтегрований в мікрочіпи контролерів і відданість забезпечує керований (по заданої програмі) обміну інформацією між ЭБУ двигуна. ЭБУ ABS, ЭБУ активної підвіски і функціональними блоками системи VDC. Зв'язок здійснюється з допомогою модифікованої інтерфейсний шини.
8.5. Результати експериментальних досліджень
8.5.1. Випробування автомобілі з системою VDC при різкій зміні напрями руху Для оцінки ефективності системи VDC проводилися модельні і натурні випробування автомобіля під час маневру зміни траєкторії руху. Порівнювалися два однотипних автомобіля, одна з яких обладнаний системою VDC. Маневр здійснювався шляхом різкого повороту рульового колеса у позитивний і негативну боку з кроком 90°. Вжиті такі початкові умови експерименту: швидкість автомобіля 40 м/с, становище педалей управління гальмом і акселератором під час маневру не змінювалося; поверхню дороги однорідна (сухий асфальт), коефіцієнт тертя між колесами та найдорожчої високий (ц = 1,0). На рис. 8.8, а показані порівняльні значення найважливіших змінних величин, аналіз яких здійснювався у процесі моделювання: кут повороту керма (град.), швидкість шастання (град/с), бічне прискорення (м/с2), кут бічного догляду автомобіля (град.). На рис. 8.8, б показано моделююча траєкторія руху автомобілів.