

Глава 8. Систему керування курсової сталістю автомобіля
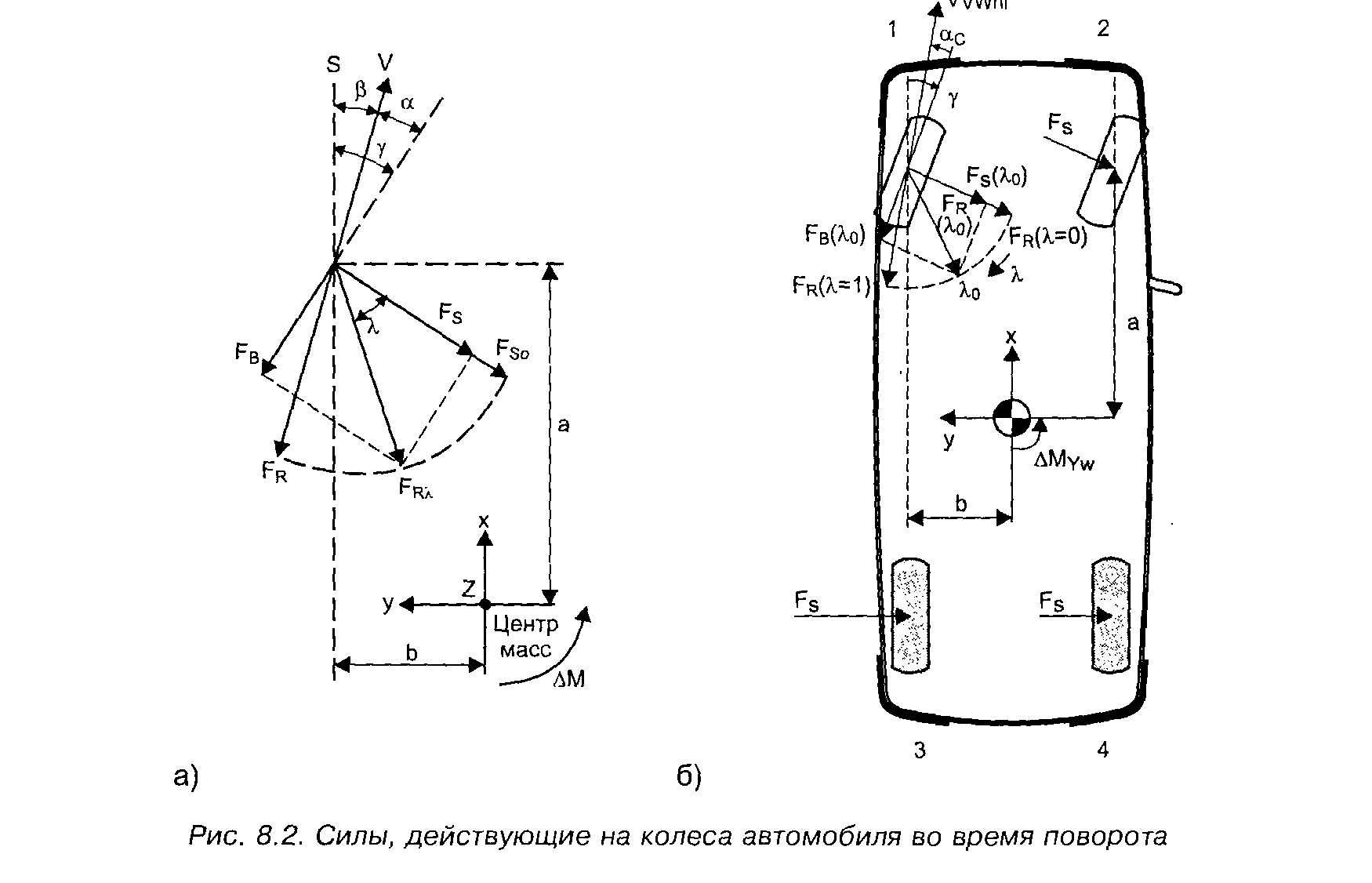 Рис.
8.2. СИЛИ, які діють колеса автомобіля
під час повороту V — вектор швидкість
руху автомобіля; P.S — поздовжня вісь
автомобіля; у — кут повороту колеса
щодо осі P.S; а — кут бічного відведення
колеса від фактичного напрями руху (від
вектора V); р = (у - а) — кут бічного
відведення автомобіля ("кут шастання»);
Fs — бічна сила діюча на вісь колеса; Fg
— гальмівна сила колеса за його ковзанні
дорогою; FR — результуюча сила бічного
відведення колеса, рівна векторної сумі
гальмівний (FB) і бічний (Fs) сил. (FR = Fs +.
FB); X — кут між віссю колеса і напрямом
його ковзання
Рис.
8.2. СИЛИ, які діють колеса автомобіля
під час повороту V — вектор швидкість
руху автомобіля; P.S — поздовжня вісь
автомобіля; у — кут повороту колеса
щодо осі P.S; а — кут бічного відведення
колеса від фактичного напрями руху (від
вектора V); р = (у - а) — кут бічного
відведення автомобіля ("кут шастання»);
Fs — бічна сила діюча на вісь колеса; Fg
— гальмівна сила колеса за його ковзанні
дорогою; FR — результуюча сила бічного
відведення колеса, рівна векторної сумі
гальмівний (FB) і бічний (Fs) сил. (FR = Fs +.
FB); X — кут між віссю колеса і напрямом
його ковзання
Управляючи тяговими силами FD головних коліс (FD3 + F„4) і гальмовими силами F„ всіх чотирьох коліс (FB,, FB2, FB3, FB4), можливо домогтися такої міри руху автомобіля на поворотах чи слизькою дорозі, у якому МЕ«МК. Км — критичне значення сумарного моменту МЕ, у якому кути бічного відведення центрів переднього і заднього мостів з'являються під впливом бічного юза, а результаті еластичного прогину шин всіх чотирьох коліс. У разі колеса не зриваються в юз і автомобіль залишається керованим. (Відповідно до ОСТ 37.001.05186, керованість автомобіля — це її здатність точно слідувати повороту передніх коліс [22].) Функції автоматичного управління підторможування і тягової силою коліс при повороті автомобіля великій швидкості або за русі по слизькою дорозі виконує систему управління курсовою сталістю (система VDC).
8.3. Функціональна блок-схема системи VDC
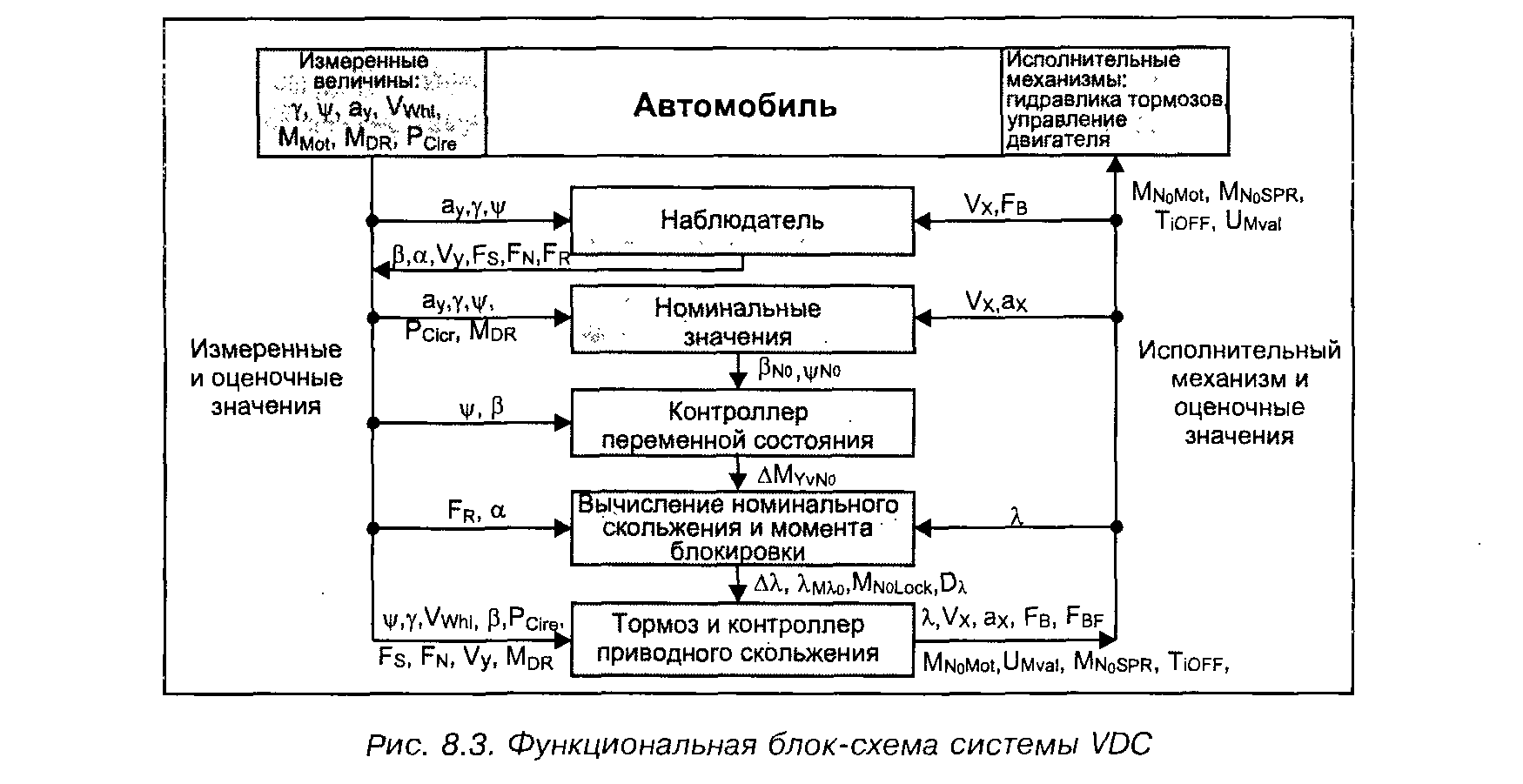
РИС. 8.3. Функціональна блок-схема системи VDC
8.3. Функціональна блок-схема системи VDC
8.3. Така схема описує функціональну взаємозв'язок параметрів системи VDC і Порядок їх опрацювання. По-перше, по вхідним параметрами (впливам водія на керівні органи), які з допомогою датчика кута повороту рульового колеса, датчика дросельної заслінки і датчика тиску у гальмівній системі перетворюються на електричні сигнали, визначається номінальне (штатне) поведінка автомобіля, описане номінальними значеннями регульованих змінних. Це найважливіша і найскладніше завдання для контролера системи VDC, оскільки поведінка автомобіля залежить тільки від впливів водія, а й від невідомих впливів довкілля, наприклад, від тертя між колесами та найдорожчої, від температури повітря тощо. буд. З іншого боку, значення регульованих змінних би мало бути обрані такими, щоб поведінка автомобіля в критичних ситуаціях було подібним руху в нормальних умов. По-друге, за отриманими значенням від датчиків швидкості коліс, датчика шастання і датчика бічних прискорень визначається фактичне поведінка автомобіля, відповідне фактичним значенням регульованих змінних. Далі обчислюється і використовується різницю між номінальними і фактичними значеннями змінних величин як набір управляючих сигналів в контролері системи VDC. Задля реалізації завдання управління бічним уводом кожного колеса окремо, т. е. і під час основний функції системи VDC, необхідно, щоб гальмівний тиск в кожному колесі міг модулюватися незалежно від водія і цього вимагає закладена на згадку про ЭБУ—VDC програма управління. Звідси очевидно істотну різницю між системами ABC і VDC. Для системи ABC колесо є управління швидкістю його обертання, щоб уникнути блокування і зберегти ковзання колеса малим (не більше допустиму норму). У цьому запобігається можливість появи і деякого впливу поперечної сили. Для системи VDC автомобіль є управління із єдиною метою стабілізації руху на критичних ситуаціях, коли пробуксовкою коліс можна й потрібно управляти, щоб отримати необхідні поперечні і подовжні сили на рухомий автомобіль.
Глава 8. Систему керування курсової сталістю автомобіля У критичній ситуації, коли автомобіль починає зриватися в рух бічним юзом, ширина смуги ковзання між передніми і задніми колесами більше ширини автомобіля. Це дозволяє вибрати каскадну структуру системи управління, у якій внутрішній контур управління із другого зв'язком управляє пробуксовкою коліс, а зовнішній — рухом автомобіля. Така структура системи управління показано на рис.
8.4. Наглядач Оцінка значень фазових змінних
Контролер динаміки автомобіля Управління швидкістю шастання і кутом бічного відведення автомобіля
Сигнали датчиків для УРС
Про Датчик швидкості колеса © Датчик тиску у гальмівній системі © Датчик кута повороті керма Про Датчик швидкості шастання © Датчик бічного прискорення © Модуляція тиску у гальмівній системі Про Систему керування двигуном
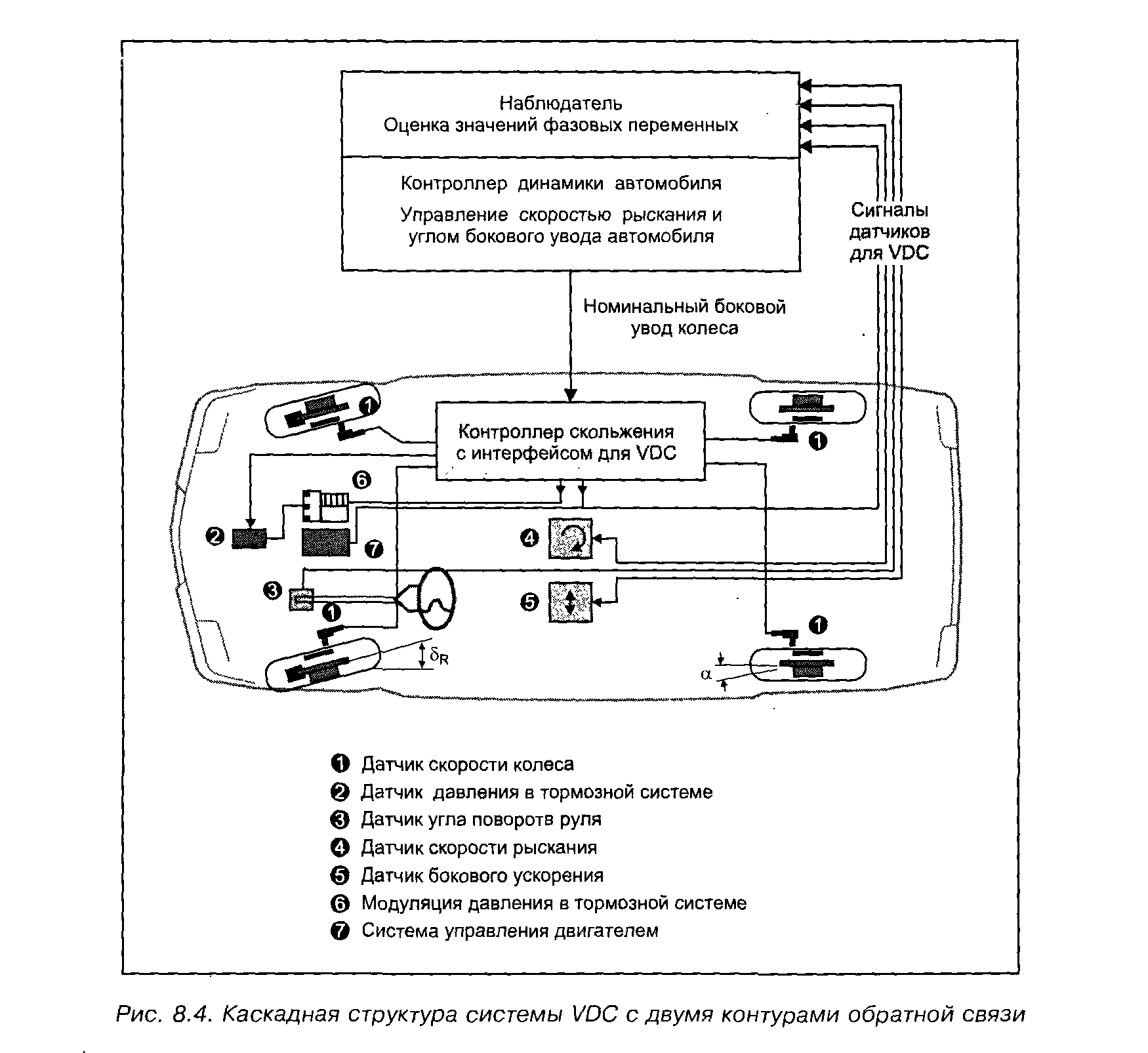
РИС. 8.4. Каскадна структура системи
VDC з цими двома контурами зворотний зв'язок У зовнішньому контурі управління із другого зв'язком відбувається корекція номінальних значень ковзання коліс під необхідну позаштатних умов руху. У цьому контролер ковзання отримує сигнали управління від контролера динаміки автомобіля як різних величин між номінальними і фактичними параметрами руху, і навіть від датчиків автомобіля. У внутрішньому контурі формуються сигнали самонаведення виконавчих механізмів, з допомогою яких коригується бічний відведення коліс до номінальних значень ковзання. Наглядач використовується у тому, щоб оцінити фактичне значення кута бічного відведення автомобіля та інших не вимірюваних величин, наприклад, сил на колеса, спрямованих по нормальний.
8.4. Технічна реалізація системи VDC
Як і системі ABC, алгоритм управління запрограмований і зберігається в ПЗУ—VDC. Коли система VDC активовано, контролер ковзання реалізує вибірку даних із пам'яті, порівнює його з поточними значеннями, виробляє коригувальні сигнали і передає їх у виконавчі устрою. Систему керування двигуном реалізована як внутрішній контур управління із другого зв'язком. Номінальні значення сигналів, що передаються до системи управління двигуном по шині CAN-інтерфейсу, визначають межі регулювання крутного моменту.
8.4. Технічна реалізація системи VDC
8.4.1. Основні компоненти
На рис. 8.5 показано основні компоненти системи VDC. Датчик швидкості шастання, акселерометр бічного прискорення, датчик кута повороту рульового колеса і електронний блок управління встановлюються в салоні чи багажнику автомобіля. Під час розробки системи VDC було використано складові компоненти раніше освоєних систем ABC і ASR, такі як гідро прилади, нагнітальні насоси, датчики швидкості коліс, акселерометр бічних прискорень, блок автоматичного управління дросельної заслінкою, електронний блок управління. Тому дослідно-конструкторські розробки системи VDC були до мінімуму й і її виявилася прийнятною для установки на ексклюзивні автомобілі.
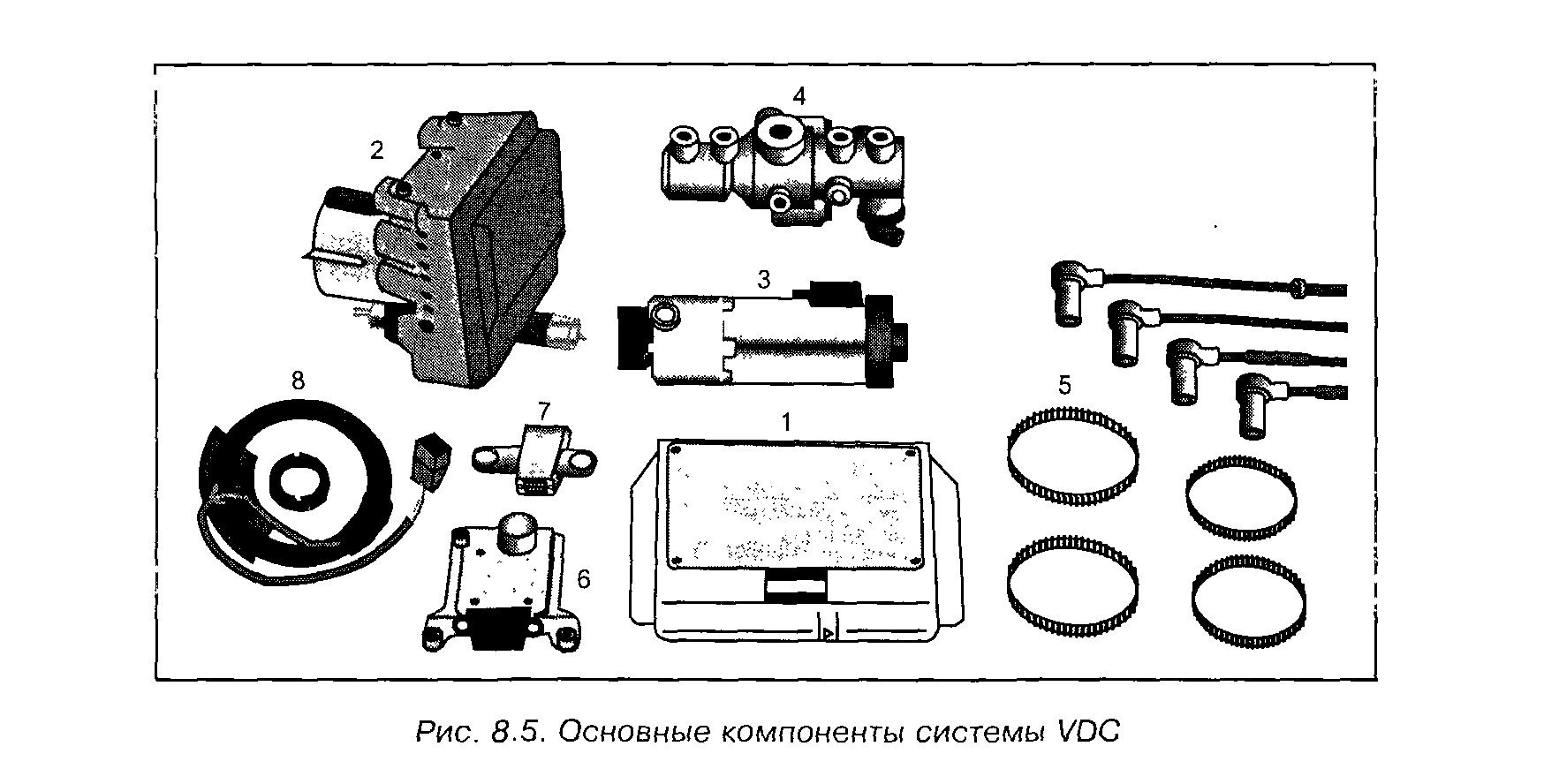 РИС.
8.5. Основні компоненти системи VDC
РИС.
8.5. Основні компоненти системи VDC
1 — електронний блок управління; 2 — гідравлічний блок; 3 — гідронагнітач насос з електроприводом; 4 —диференційний гідропідсилювач з датчиком тиску; 5 — колісні датчики; 6 — гироскопічний датчик швидкості шастання; 7 — акселерометр бічного прискорення; 8 — датчик кута повороту керма На рис. 8.6. показано розташування компонентів системи VDC автомобілем Mercedes. I75