

Глава 7. Протокол can для автомобільних мультиплексних систем
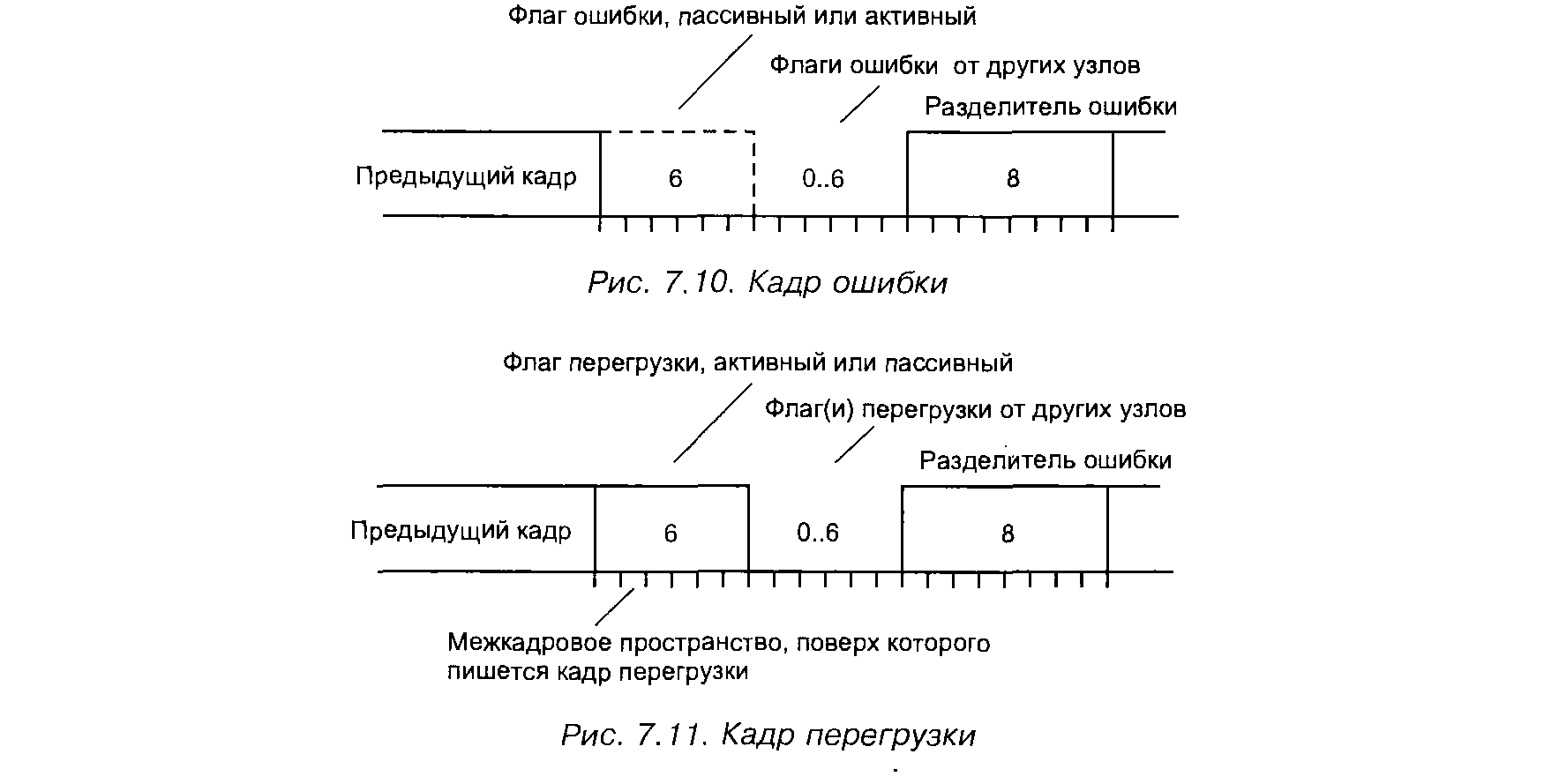
Рис. 7.10.
Рис. 7.11. Кадр перевантаження
► Кадр перевантаження (переповнення) посилається на шину підрівнями MAC чи LLC (див. рис. 7.1) для виявлення перевантаження чи деяких помилок. З отриманням кадру перевантаження вузол затримує передачу чергового кадру даних на шину, даючи приймачу час виконати її завдання. Кадр перевантаження (рис. 7.11) містить два поля — прапор перевантаження і роздільник. За структурою кадр перевантаження збігаються з кадром помилки, але відрізняється часом передачі. Кадр помилки передається відразу після її виявлення однією з вузлів, а кадр перевантаження передається по закінченні поточного кадру, ігноруючи між кадровий простір. Поява кадру помилки у сучасних мережах CAN — подія малоймовірне. Ця опція збережена для сумісності з повільнішими CAN — контролерами колишніх розробок, наприклад, з піонером — Intel80526. Сучасніші контролери це Intel: 82527; Philips: SJA1000; Siemens: 81C90; Siemens: 81C91.
► На підрівні MAC між закінченням попереднього та початком наступного кадру обов'язково проходить кілька днів, що називається між кадровим простором. Перед кадрами помилок, і перевантаження між кадрового Вузол в активному режимі чи був приймачем останнього повідомлення Кадр між кадровий простір Кадр
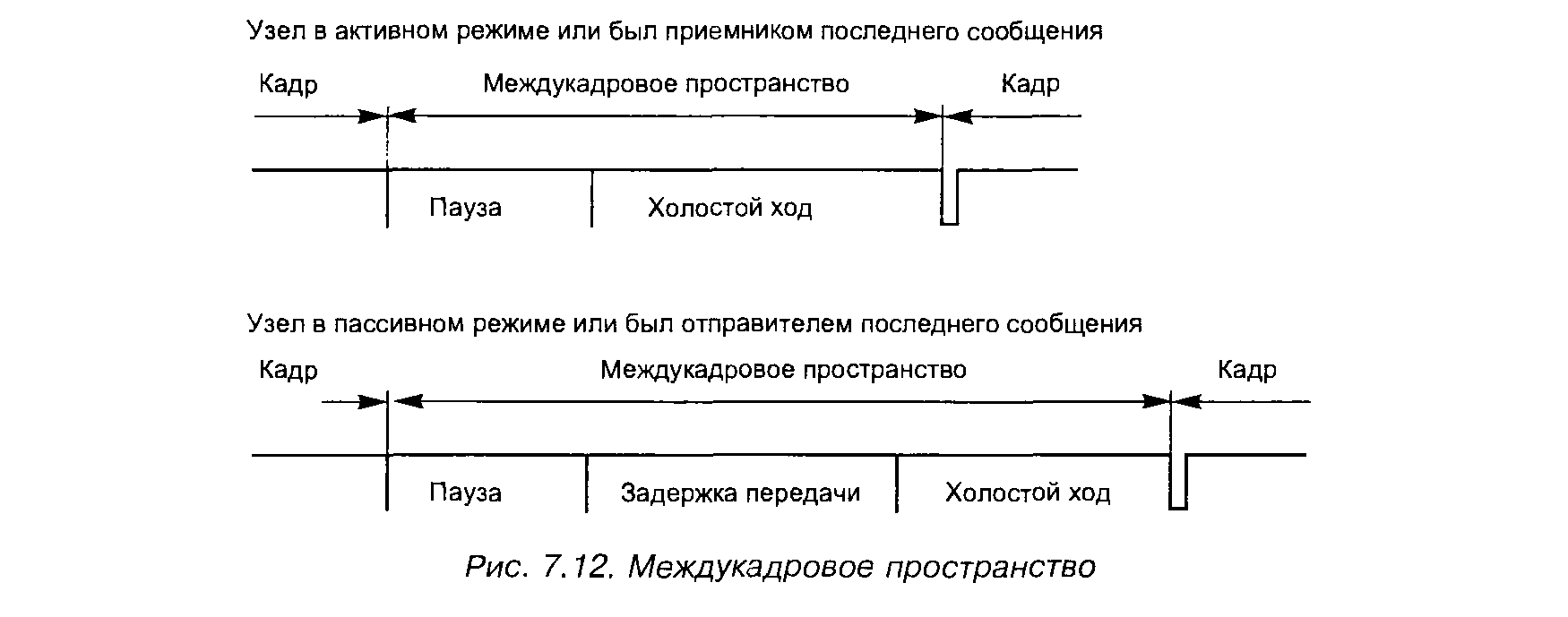
Рис. 7.12.
простору немає. Простір між кадрами може містити поля: «між кадровий простір», «холостий хід шини», «затримка передачі». Для вузлів в активному режимі (рис. 7.12) між кадровий простір містить паузу і холостий хід. Якщо вузол перебуває у пасивному режимі був передавачем останнього кадру по мультиплексної шині даних, він додає 8 біт не домінуючого рівня («затримка передачі») в між кадровий простір. Якщо інший вузол почне передачу даних тим часом, то вузол як пасивної помилки стане приймачем наступного кадру, замість продовжити передачу. І тут вузол як пасивної помилки присвоїть всім переданих їм кадрам нижчий пріоритет, ніж в кадрів, переданих вузлами як активної помилки.
► У протоколі CAN використовується NRZ-код (non-return-to-zero). У цьому ефективно використовується частотна смуга лінії зв'язку, якщо в послідовності багато бітів одного значення, можливо порушення синхронізації. Щоб запобігти цього, у послідовність, що складається з 5 і більше однакових бітів, вставляються додаткові синхронізуючі біти (рис. 7.13). У приймальнику ці допоміжні біти автоматично прибираються.
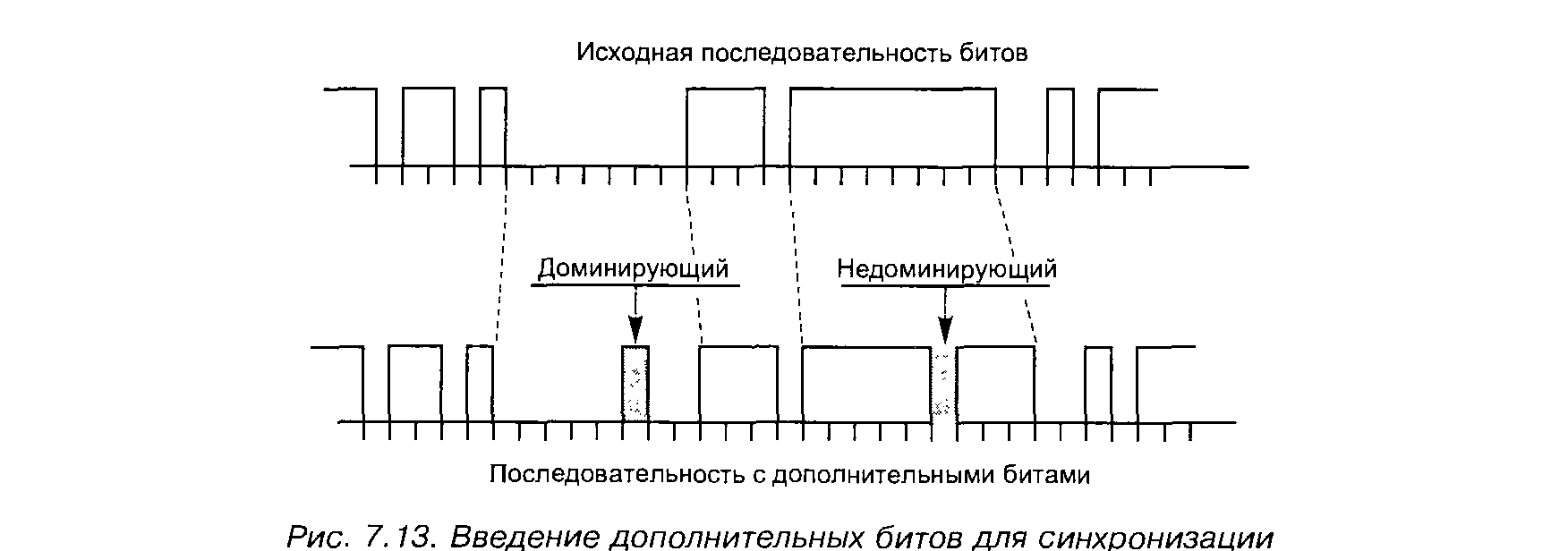 Рис.
7,13. Запровадження додаткових бітів для
синхронізації
Рис.
7,13. Запровадження додаткових бітів для
синхронізації
Кадр завжди передається починаючи з стартового біта (SOF). У межах нуля першими йдуть біти, які мають найважливішу інформацію.
► Побітовий арбітраж є особливістю протоколу CAN. Мультиплексна система, підпорядковується CAN-протоколу, є рівноранговий. Будь-який вузол має право доступом до шині, коли він вільна. Ознакою цього є виявлення вузлом між кадрового простору. Пріоритет повідомлення визначається 11-битовым ідентифікатором і наступним його битому індикатора запиту. Ідентифікатор, у якому менше двійкове число, має як високий пріоритет. Пріоритети встановлюються за різними подіями на етапі проектування й неможливо знайти змінені динамічно. Конфлікт під час спроби доступу кількох вузлів до шині дозволяється по бітовим арбітражем ідентифікаторів кадрів, переданих конфліктуючими вузлами. На рис. 7.14 показані три вузла, намагаються одночасно одержати доступ мережі CAN. Для першого вузла ідентифікатор 0111111..., на другому — 0100110..., для третього — 0100111... Перші дві цифри в ідентифікаторах збігаються, все три вузла продовжують передавати інформацію (у разі свої ідентифікатори) на шину до приходу третьої цифри, у своїй шина буде встановлена у домінуюче