Глава 6. Автомобільні мультиплексні системи передачі
При детермінованих методах доступу передає середовище розподіляється між вузлами з допомогою спеціального механізму управління, що гарантує передачу даних вузла протягом певного, досить малого інтервалу часу. Найпоширенішими детермінованими методами доступу є метод опитування і метод передачі права. Метод опитування використовується переважно у мережах зіркоподібною топології. Метод передачі права застосовується у мережах із кільцевої топологією. Він грунтується на передачі через мережу спеціального повідомлення — маркера. Маркер — службове повідомлення певного формату, у якому абоненти мережі можуть поміщати свої інформаційні пакети. Маркер циркулює по кільцю, і будь-яка вузол, має дані передачі, поміщає в вільний маркер, встановлює ознака зайнятості маркера і передає його за кільцю. Вузол, що було адресовано повідомлення, приймає його, встановлює ознака підтвердження прийому інформації та відправляє маркер в кільце. Передавальний вузол, отримавши підтвердження, звільняє маркер і посилає його до мережі. Існують методи доступу, використовують кілька маркерів. Недетерміновоні — випадкові методи доступу передбачають конкуренцію всіх вузлів мережі за право передачі. Можливі одночасні спроби передачі з боку декількох вузлів, у результаті виникають колізії. Найпоширенішим недетермінованим методом доступу є множинний метод доступу з контролем несучою частоти і виявленням колізій (CSMA/CD). Контроль несучою частоти у тому, що вузол, бажаючий передати повідомлення, «прослуховує» передавальну середу, очікуючи її звільнення. Якщо середовище вільна, вузол починає передачу. Слід зазначити, що топологія мережі, метод доступу до передавальної середовищі і метод передачі щонайтісніше пов'язані один з одним. Визначальним компонентом є топологія мережі. 6.2.6. Тимчасовий і частотне ущільнення сигналів в мультикомплексних системах За методами ущільнення сигналів локальні обчислювальні мережі (ЛВС) можна розділити на великі категорії — з тимчасовим і частотним ущільненням. Ці дві методу ущільнення засновані різними принципах використання робочої смуги частот системи. 1. Тимчасовий ущільнення. На рис. 6.11, а показано, що у мережах із тимчасовим ущільненням (чи з передачею сигналу без модуляції) у будь-якій конкретний момент часу передачу даних через мережу веде один схожий пристрій, займаючи усю шпальту частот системи. Такий метод забезпечує дуже дорогу швидкість передачі у бітах в секунду. Щоб дати багатьом абонентам звертатися до неї, тривалість кожної передачі має обмежуватися заданим інтервалом часу. До кожного блоку даних приєднується адресу того вузла, який повинні пересилатися ці дані. Кожен вузол постійно контролює адреси на шині, щоб виявити блоки даних, щоб їх саме. Можливості ЛВС з тимчасовим ущільненням сигналів обмежуються тим, що у конкретний час передавати дані через таку мережу може лише одне абонент. Насправді загальна кількість абонентів ЛВС залежить середньої
6.2. Локальні обчислювальні мережі часової тривалості (довжини) повідомлень і кількість повідомлень, які потрібно передати певну час. 2. Частотне ущільнення. З рис. 6.11, б видно, що у мережах із частотним ущільненням сигналів (чи широкосмугових мережах) смуга частот розбита на цілий ряд непереривних частотних піддіапазонів. Кожній парі взаємодіючих між собою вузлів виділяється із цих піддіапазонів. Отже, будь-якої миті часу звертатися до неї можуть одночасно багато абонентів, оскільки вони використовують різні піддіапазони частот. Тимчасовий ущільнення Сигнал А Сигнал У
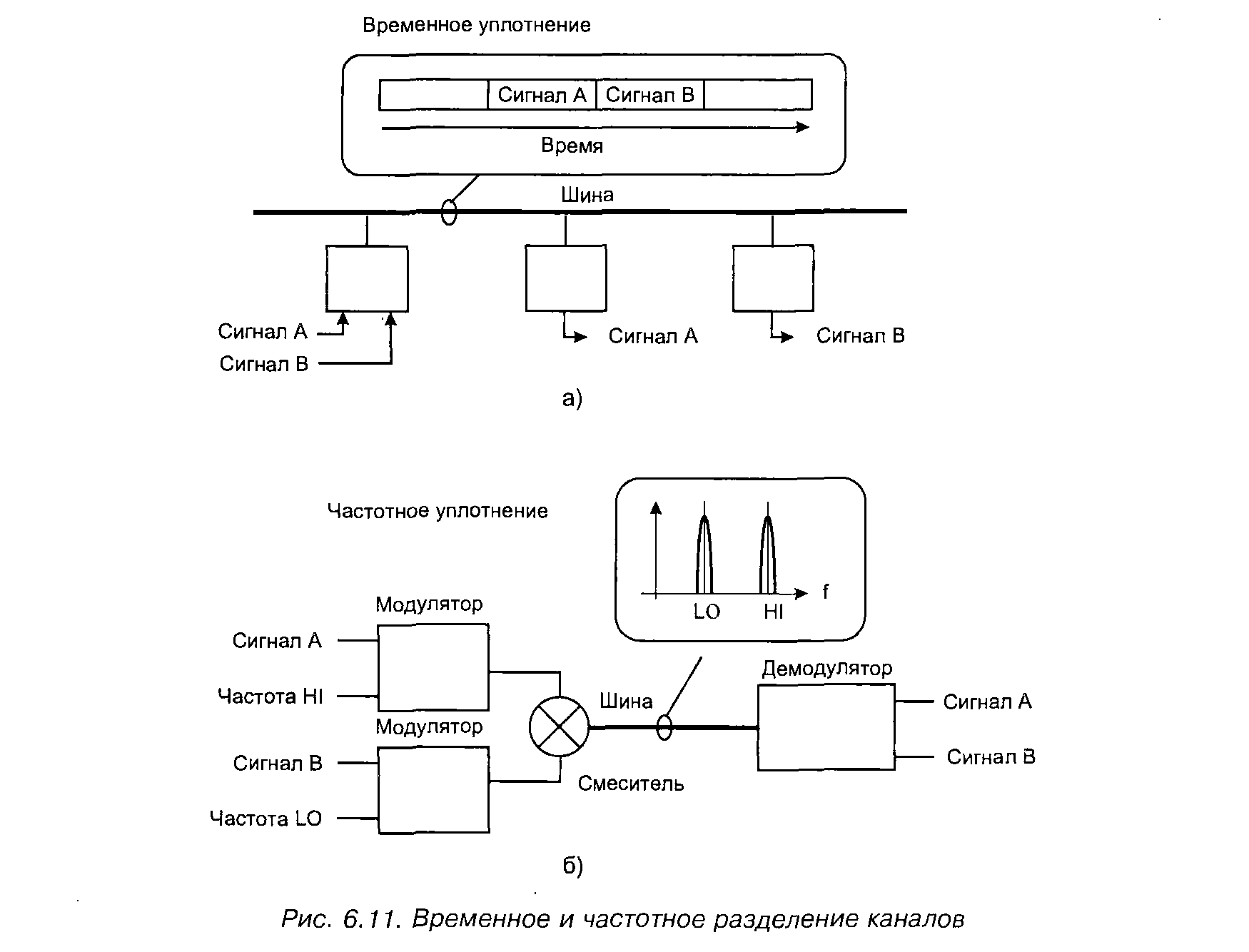 РИС.
6.11. Тимчасовий і частотне поділ каналів
РИС.
6.11. Тимчасовий і частотне поділ каналів
Зазвичай, коли два вузла встановлюють між собою зв'язок через широкосмугову мережу, їм виділяється певний частотний піддіапазон, тому не потрібно вказувати адресу перед блоком даних, і накладати обмеження на тривалість передачі. Перевага методу частотного ущільнення у тому, що на відміну від тимчасового ущільнення вона дозволяє багатьом абонентам одночасно обмінюватися даними через мережу. Проте за число одночасно обертаються до неї абонентів також накладається природне обмеження. Якщо будь-якої час зайняті все виділені піддіапазони частот, то жоден інший абонент зможе одержати доступ мережі. Отже, хоча метод частотного ущільнення забезпечує вищу швидкодію мережі, за його використанні загальна кількість абонентів може бути меншою, аніж за часовому ущільнення.
6.3. Приклади автомобільних мультиплексних систем
6.3.1. Клас А Системи класу А застосовуються переважно спрощення і здешевлення електричних сполук між пристроями корпусної електроніки. Розглянемо приміром антивикридальну систему зі структурою, показаної на рис. 6.12. Антивикрадальна система наводиться в черговий режим контактом 11, а вимикається — контактами замків дверей пасажира чи шофера або багажника. У робочому стані система включає клаксон 10 при спрацьовуванні однієї з контактів: 1, 3, 4, 5, 7, 8. Датчики і виконавчі механізми у тому варіанті підключені безпосередньо до блоку управління через мультиплексори одним дротом. Поліпшено діагностичні можливості системи. Легше змінювати
 РИС.
6.12. Блок-схема антивикрадальної системи
1 — контакт двері водія, 2 — контакт
замку двері водія, 3 — контакт лівої
задньої двері, 4 — контакт на капоті, 5
— контакт двері пасажира, 6 — контакт
замку двері пасажира, 7 — контакт правої
задньої двері, 8 — контакт на кришці
багажника, 9 — контакт замку багажника,
10 — клаксон, 11 — контакт на приладовій
панелі
РИС.
6.12. Блок-схема антивикрадальної системи
1 — контакт двері водія, 2 — контакт
замку двері водія, 3 — контакт лівої
задньої двері, 4 — контакт на капоті, 5
— контакт двері пасажира, 6 — контакт
замку двері пасажира, 7 — контакт правої
задньої двері, 8 — контакт на кришці
багажника, 9 — контакт замку багажника,
10 — клаксон, 11 — контакт на приладовій
панелі
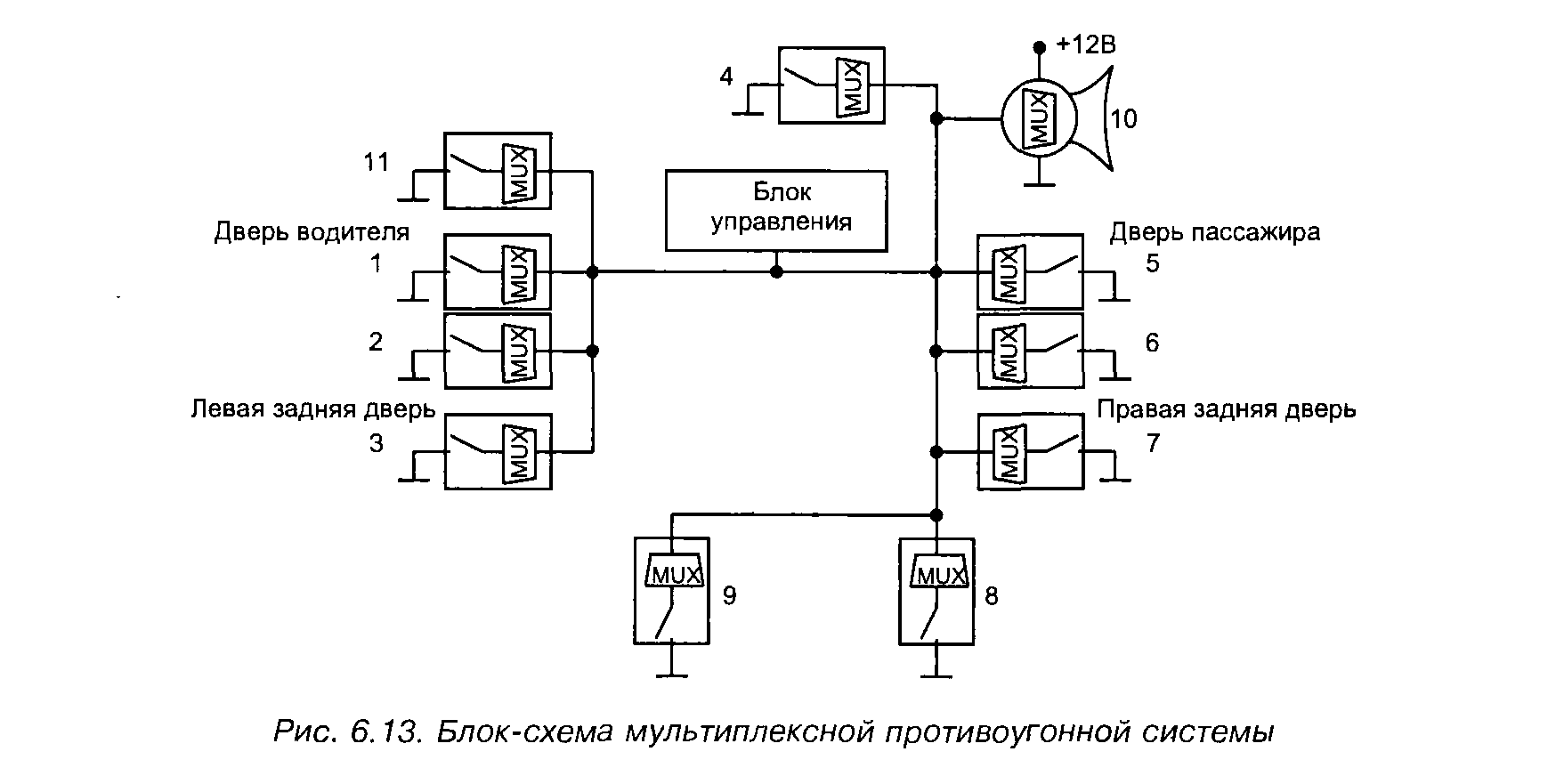
Рис. 6.13. Блок-схема мультиплексної антивикрадальної системи
6.3. Приклади автомобільних мультиплексних систем конфігурацію антивикрадальної системи, підключаючи лише до й тією самою шині через мультиплексори додаткових датчиків і виконавчі механізми. Мультиплексори — відносно нескладні мікроелектронні устрою, які містять до 300 напівпровідникових вентилів. Їх інтегрують з датчиками і виконавчими механізмами. І це пристрій може бути реалізований в мультиплексному варіанті 1рис. 6.13). 6.3.2. Клас У На рис. 6.14 показано частина типовою інформаційної системи водія (ИСВ). Тут сигнали з датчиків надходять на бортовий комп'ютер, до шині даних якого підключена комбінація приладів.
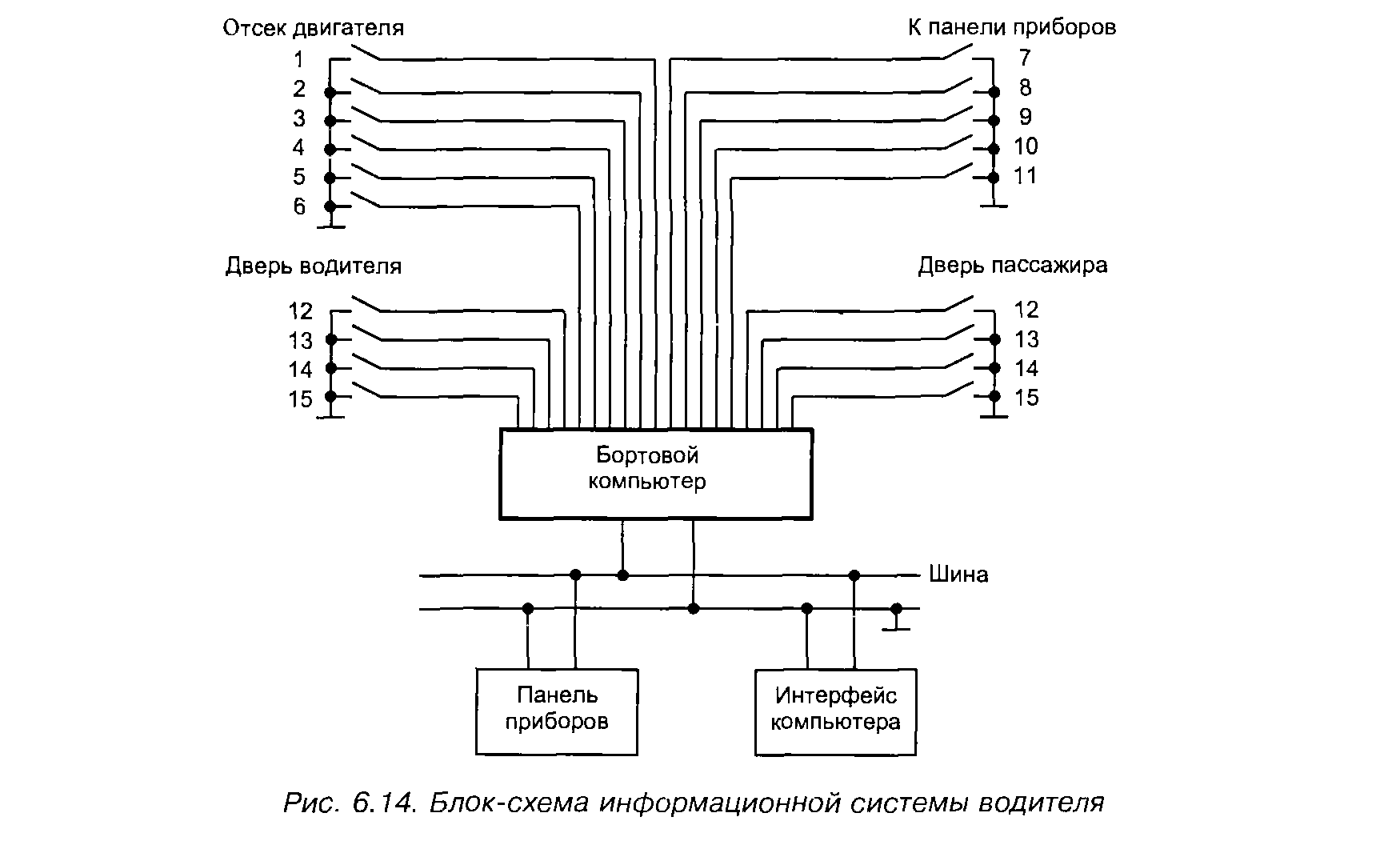 РИС.
6.14. Блок-схема інформаційної системи
водія
РИС.
6.14. Блок-схема інформаційної системи
водія
У спрощений варіант ИСВ число дротів в джгуті дуже велике, що виправдовує цю схему сполук. Проте, принаймні ускладнення електронних приладів автомобіля і збільшення кількості функцій інформаційної системи, кількість з'єднувальних дротів різко зростає, ускладнюється діагностика несправностей. Можливим розв'язанням у разі лежить введення кількох вузлів, поєднаних з шиною класу У, яких підключаються відповідні датчики. У цьому намагаються зменшити розміри джгутів, що пропливали вузькі місця типу «дверцята — корпус». До вартості проводки додається вартість вузлів. На рис. 6.15 приведено блок-схема ІТУ з шиною класу У, у якому цифрами є такі сигнали датчиків. Вузол моторного відсіку бажано інтегрувати з ЭБУ двигуна, куди вже підключена частина датчиків. Це здешевлює і спрощує схему, але завжди можливо, т. до. зєднувач на ЭБУ зазвичай перевантажений.
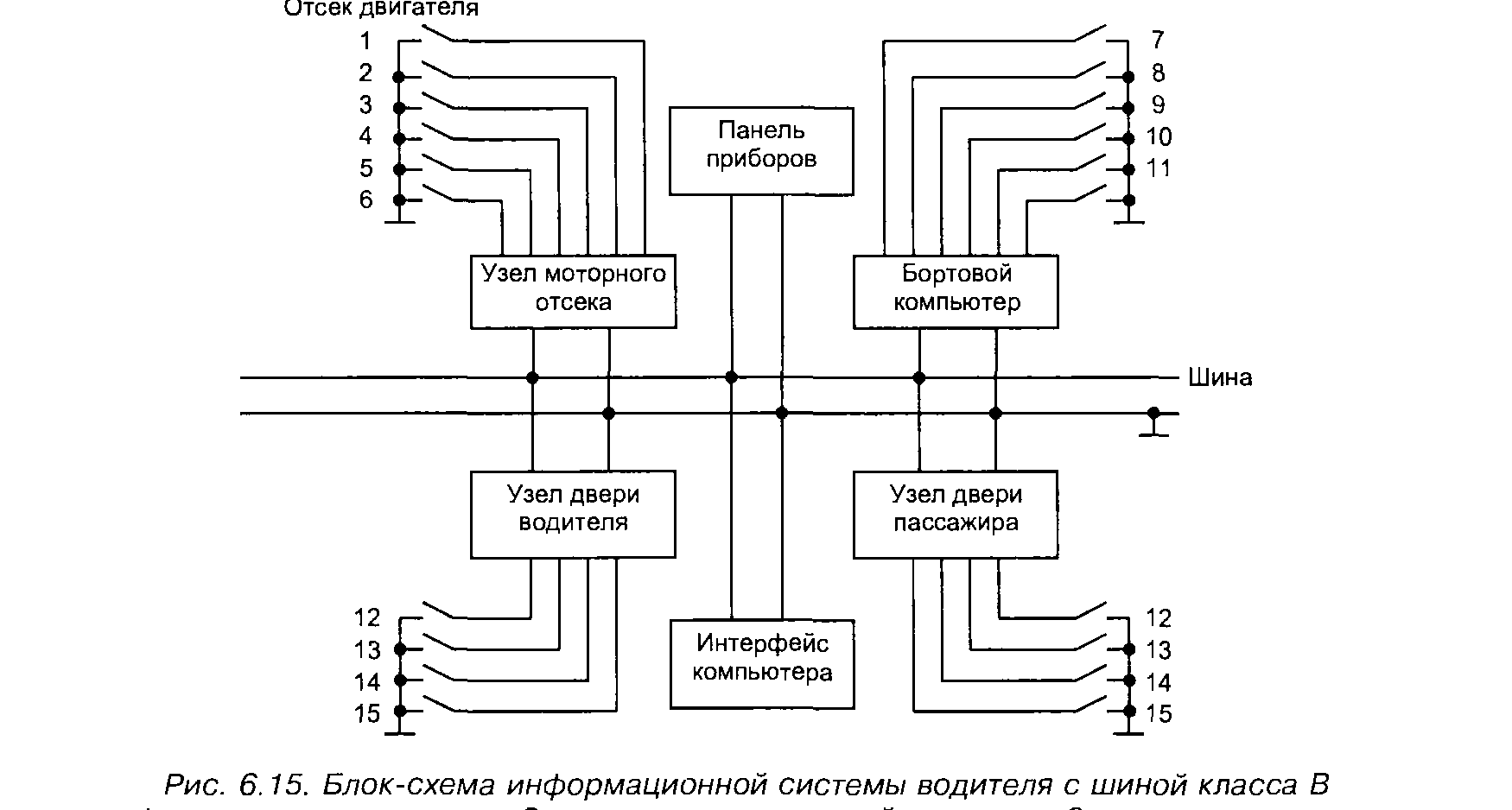
РИС. 6.15. Блок-схема інформаційної системи водія з шиною класу
У 1 — рівень охолоджувача, 2 — тиск гальмівний рідини, 3 — рівень олії, 4 — олії у коробці передач, 5 — омиваюча рідина, 6 — капот не закритий, 7 — фари включені, 8 — мало палива на баку, 9 — склоочисники включені, 10 — ключ в замку запалювання, 11 — прив'язні ремені, 12 — ручка двері, 13 — замок, 14 — двері закрита, 15 — двері не зачинено Вузол двері краще розташовувати у двері, тоді джгут через проміжок спрощується, бажана також інтеграція електронних і механічних пристроїв у двері. Структурна схема електронної частини пристроїв двері показано на рис.
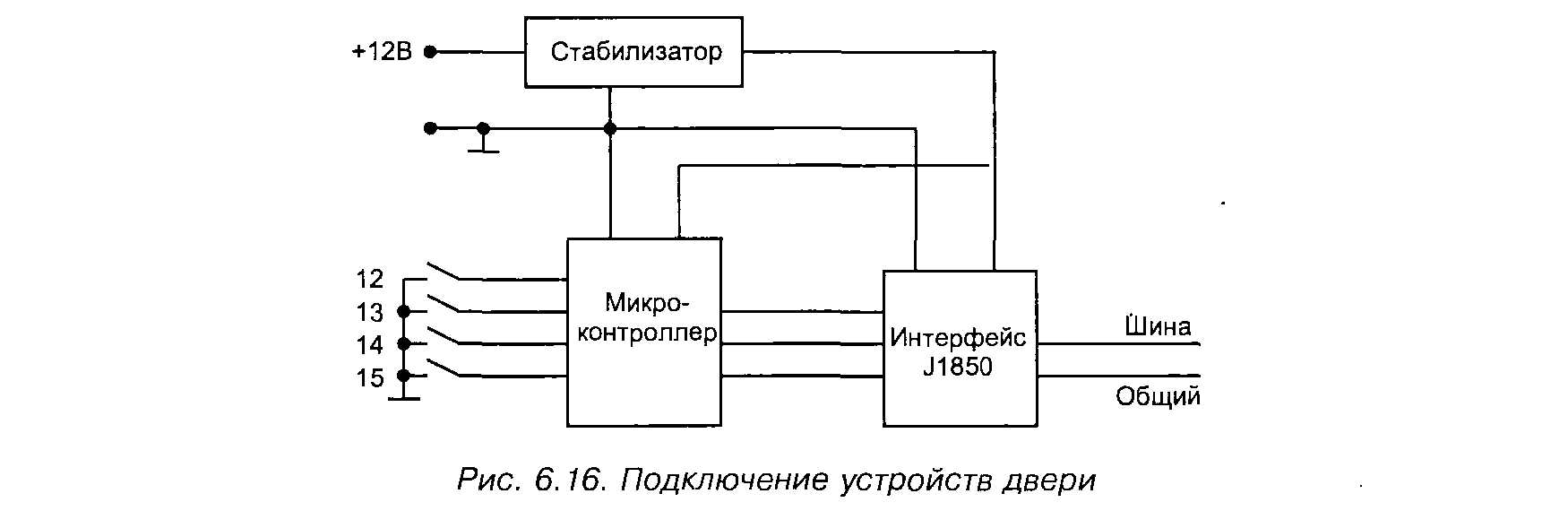
Рис. 6.16. Підключення пристроїв двері
Загальні зауваження до застосуванню вузлів.
1.Для зниження вартості вузли виконуються з урахуванням спеціалізованих мікросхем. 2. Єдина конструкція можлива під час використання мікропроцесорів в вузлах.
3. Комбінація «звичайний датчик — мультиплексний вузол» не полегшує діагностику датчиків. Не можна визначити, що став саме несправне — датчик чи проводка. 140
Принаймні значного ускладнення бортовий автомобільної електроніки мультиплексні системи, виконані за класами Проте й У, стають не оптимальними. Кращим технічним рішенням є використання гібридної локальної мережі, де датчики і виконавчі механізми через канал класу А під’єднанні до бортовому комп'ютера, а приладова панель і інтерфейс комп'ютера (дисплей і керівні органи) під'єднані до комп'ютера через канал класу У, мультиплексори інтегровані у датчики і виконавчі механізми. Обмін даними проходить за одному дроту, додаткових вузлів немає, поліпшено діагностика з допомогою запровадження компоненти електроніки. Така конфігурація системи дозволяє вводити додаткових датчиків і виконавчі устрою. Тепер у бортовому комп'ютера однією виконавчий механізм можна підключати 7—14 датчиків. 6.3.3. Клас З Дедалі більшу популярність завойовує протокол CAN, із застосуванням якого мультиплексні системи класу З можуть реалізовуватися у таких формах: 1. Через те сама мережа класу З виробляється обмін даними як додатків, що працюють у часі (управління двигуном, підвіскою, передачами), так додатків, обслуговуючих бортовий комп'ютер, KOHI-роль клімату салону, приладову панель. Швидкість обміну до 1 Мбіт/сек, лінія зв'язку — коаксіальний чи оптичний кабель. 2. Гібридна мережу класу У і З. Виробляється обмін даними між вузлами швидкісної мережі класу З повагою та щодо повільної мережі класу У. Шлюзом зазвичай буває контролер двигуна. 3. Інтеграція функцій управління у часі в найменше число модулів. Наприклад, ЭБУ двигуна може керувати що й трансмісією. Під час такої архітектурі потреба у дорогих мережах класу З зводиться до мінімуму.
6.4. Протоколи високих рівнів Термін «протоколи високих рівнів» зазвичай належать до рівням 3—7 моделі ВОС. Цими рівнях вирішуються питання уявлення даних, упаковки довгих повідомлень, стандартизації додатків тощо. буд. Коли функції докладання розподілені між кількома електронними блоками управління, необхідна максимальна незалежність програмного забезпечення докладання від локалізації функцій. Вже сьогодні автомобільні засоби зв'язку з зовнішнім світом, устрою для розваги, мультимедіа кошти виробляють обмін пакетами даних між собою (радіоприймач, CD- програвач, мережевий телефон, бортовий комп'ютер, навігаційна система). Ці пакети значно перевищує розміри кадрів даних, які можна передавати по автомобільної комунікаційної шині. Розбирання і складання пакетів цих даних виробляється під керівництвом протоколів високих рівнів. З цих причин розробка й стандартизація протоколів високих рівнів важлива автомобільну промисловість. Протоколи високих рівнів мають забезпечувати:
• надійні й ефективні процедури обміну довгими послідовностями даних;
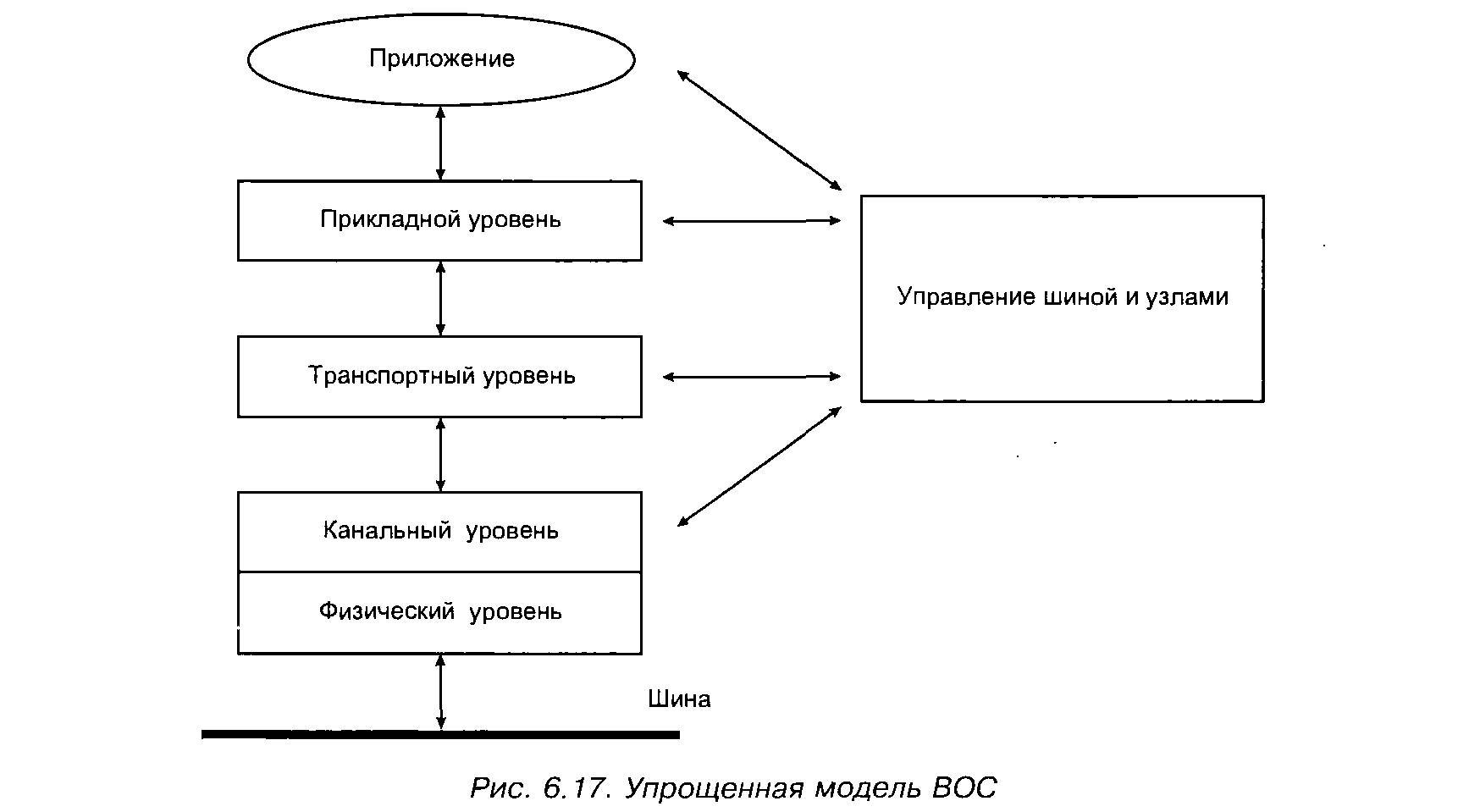
РИС. 6.17. Спрощена модель ВОС
• незалежність програмного забезпечення додатків від конфігурації сіті й устаткування;
• зручність інтерфейсу для програміста. Семирівнева модель ВОС добре адресований великих комп'ютерів, і мереж, де не потрібно для комунікацій у часі. Для автомобілів ця модель спрощується до двох верхніх рівнів — ужиткового й транспортного, як показано на рис. 6.17. Прикладний рівень забезпечує інтерфейс для програміста, переймається тим одержання і посилці даних, необхідних при управлінні різними системами автомобіля. На транспортному рівні здійснюється розбирання і складання пакетів. Блок управління мережею і вузлами виробляє контроль сіті й вузлів, виявляє несправності, активізує мережу чи переводить їх у неактивний режим. Цей блок взаємодіє безпосередньо з усіма рівнями мережевий моделі і із фотографією.
6.4.1. Транспортний рівень Транспортний рівень має забезпечити передачу довільно довгих повідомлень між об'єктами прикладних рівнів.
► Якщо довжина повідомлення перевищує розміру кадру, переданого але комунікаційної шині, повідомлення поділяється сталася на кілька пакетів. Повідомлення передається з прикладного рівня на транспортний, де поділяється на сегменти, відповідні розміру одного кадру. До кожного кадру транспортний рівень додає свою управляючу інформацію протоколу (PCI — protocol control information). Керуюча інформація використовується транспортним рівнем на приймаючої боці на відновлення вихідного повідомлення й його що бере прикладному рівню. Керуюча інформація протоколу містить інформацію про числі кадрів в вихідному повідомленні, номері поточного кадру у міжнародному сполученні, необхідна щоб виявити і виправлення помилок типу пропуску чи дублювання кадру.
6.4. Протоколи високих рівнів
► Керуюча інформація протоколів високого рівня зазвичай розміщається на полі даних кадру низького рівня (рис. 6.18, а). У автомобільних мультиплексних системах іноді управляюча інформація протоколу розміщається в управляючому (арбітражному) полі кадру низького рівня (рис. 6.18, б). Ця технологія робить мультиплексну систему більш швидкодіючої, але збільшує залежність від протоколів низького рівня життя та застосовуваної апаратури.
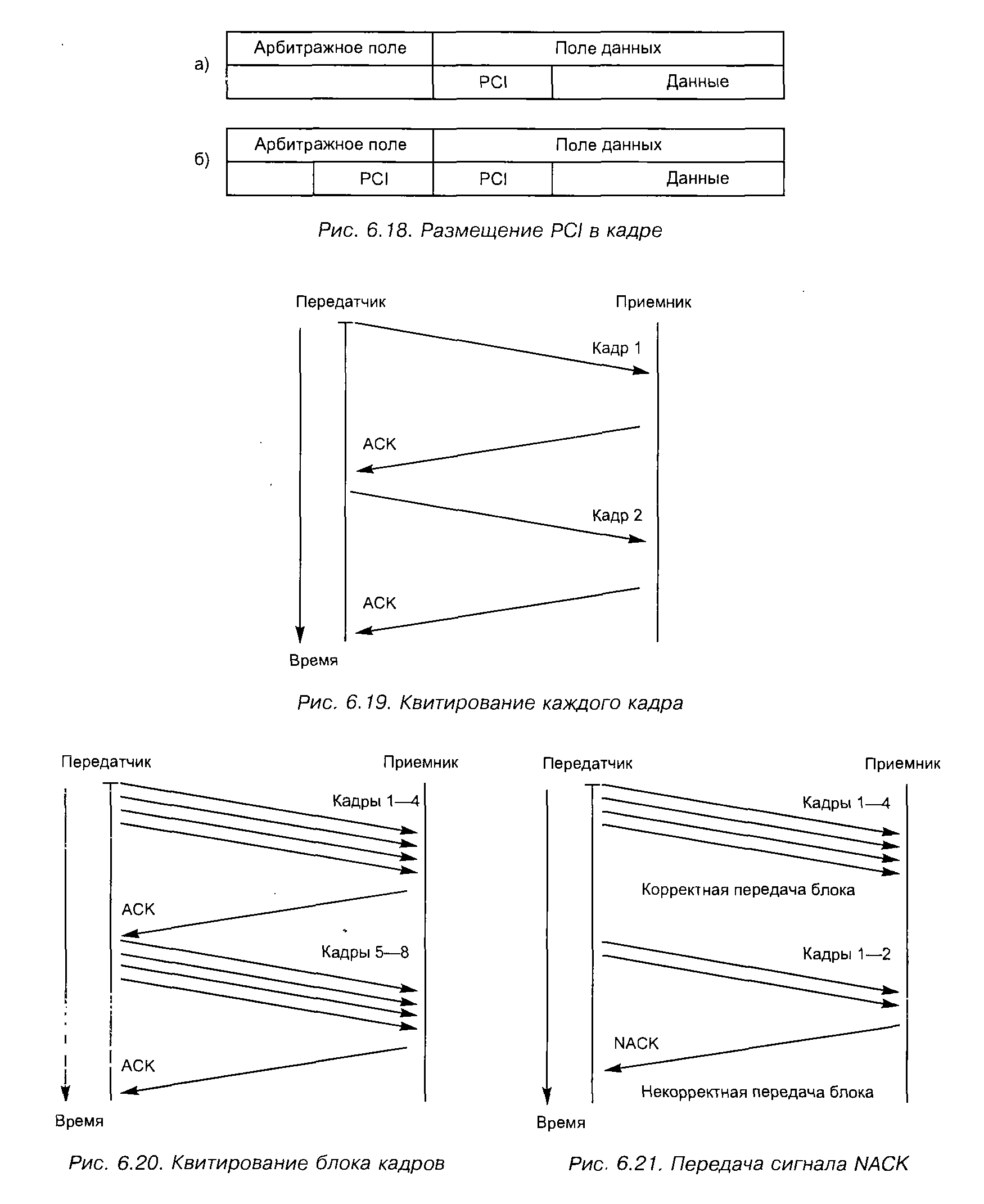
Рис. 6.18
Рис. 6.19
Рис. 6.20 Рис. 2.1.
► Механізм управління потоком повідомлень (трафіком) включає використання два види підтверджень:
• позитивне підтвердження АСК. (скорочення від acknowledge);
• негативне підтвердження NACK (скорочення від negative acknowledge). Позитивне підтвердження сигналізує передавача, що чи кадр було прийнято правильно і приймач готовий узяти наступний кадр. Позитивне підтвердження необхідно, коли передавача невідома швидкість прийому повідомлень приймачем. Позитивне підтвердження то, можливо, наприклад, використано для синхронізації передачі між швидкодіючої і повільної шиною без буферировання. І тут швидкість обміну визначається можливостями повільної шини. У "тенета можна реалізувати режими, коли приймач квитирує (підтверджує) кожен ухвалений кадр (рис. 6.19) чи блок кадрів (рис. 6.20), що більш ефективно себто швидкодії мультиплексної системи. Негативне підтвердження видається приймачем до мережі, коли відбувається неправильно. Режим роботи з негативним підтвердженням може збільшити швидкодія мережі, бо за відсутності помилок число кадрів, переданих від передавача до приймача, отже, і їх передачі зменшується (рис. 6.21). Насправді можна використовувати різні комбінації механізмів керування передаванням даних у мережі.
► І приймач, і передавач може мати кошти на виявлення й виправлення помилок. Приклади помилок, які можна виявлено:
• приймач недоотримав кадр у встановлений час;
• приймач отримав некоректне кадр, наприклад, ні з тим номером;
• приймач не закінчив обробку отриманого кадру, але готовий отримати наступний кадр;
• передавач недоотримав позитивне підтвердження у визначений час. Коли передавальний об'єкт па транспортному рівні виявляє помилку, може вступити так:
• повторити передачу кадру;
• повторити передачу всього повідомлення;
• припинити передачу і подати подальші дії додатку.
► Під час проектування транспортного рівня виникають проблеми буферизациї повідомлень. Для отримання як завгодно великих повідомлень від прикладного рівня слід мати як завгодно великий буфер (оперативну пам'ять) на транспортному рівні, що організувати неможливо. Насправді розмір повідомлень розумно обмежується буферуванням, що підвищує можливості мультиплексної системи працювати у часі.
6.4.2. Прикладний рівень
Прикладний рівень необхідної платформою до створення додатків. Він приховує деталі апаратури і мережевий конфігурації. На прикладному рівні створення додатків для мультиплексних і централізованих систем мало чим відрізняється. Додаток використовує дані не більше прикладного рівня життя та йому байдуже, локальні це з чи отримані по комунікаційної шині.
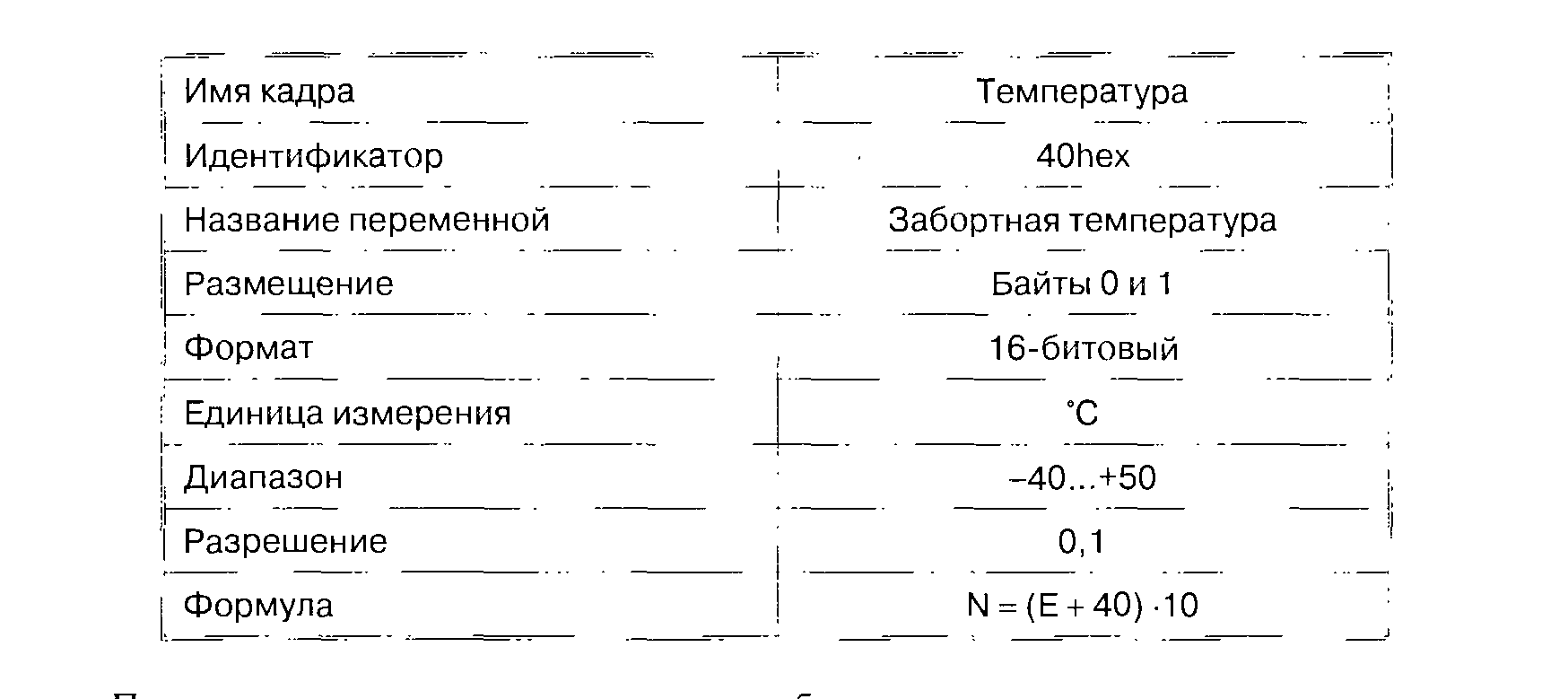
► На прикладному рівні форматується кадр з такими даними з докладання:
• ім'я кадру та її ідентифікатор;
• місце розташування змінних (параметрів) у кадрі;
• формат уявлення параметрів;
• одиниця виміру параметра:
• припустимий діапазон значень;
• що дозволяє здатність;
• формула, перетворююча числове значення у кадрі (N) в значення, маючі фізичний сенс (Є). У табл. 6.1 наведено приклад кадру:
При декодуванні кадру даних потрібно визначити, припустимо отримане значення параметра чи ні (наприклад, при несправності датчика). Це потрібно чи шляхом додавання в кадр спеціального поля, котрий фіксує достовірність/недостовірність значень параметрів, чи безпосереднім аналізом поточних значень параметрів на приймаючої боці.
► На прикладному рівні визначається, коли повідомлення має бути відправлено чи прийнято. Відправлення проводиться у разі часу, чи внаслідок обробки події. Подією то, можливо: зміна стану датчика, значення, що вийшло друком за поставлене межа; запит від іншого вузла тощо. буд. Передача за часом ведеться для параметрів, що їх доступні всієї мультиплексної системі. Такі перемінні ділять на групи з різноманітною необхідної швидкістю відновлення і передачі значень. Під час прийому повідомлень на прикладному рівні повідомлення розпаковується відповідно до прийнятим форматом кадру, і такі передаються активному додатку.
► На прикладному рівні можна реалізувати кілька моделей взаємодії між вузлами. У моделі із загальною пам'яттю обміну інформацією виробляється з допомогою операцій запису і читання. Дані відразу стають доступними всім що беруть участь процесів. У мультиплексної системі ніякої спільної пам’яті фізично немає, її створюють програмним забезпеченням прикладного рівня. 145
У моделі «клієнт — сервер» взаємодія між процесами здійснюється способом, коли деяке процес (сервер) здатний виконувати операції з запиту іншого процесу (клієнта), розміщеного й інші вузлі. Наприклад, при діагностиці сканер посилає через мережу запит ЭБУ і він здобуває у відповідь значення параметрів чи коди помилок.
6.4.3. Управління мережею (диспетчеризація)
Призначення управління (диспетчеризації) мережі — підтримувати її коректну (штатну) роботу. У цьому мають здійснюватися обробка помилок, контроль конфігурації сіті й правильності її, обмеження доступу й забезпечення схоронності інформацією мережі. Для автомобільних систем найважливішими є обробка помилок, і контроль конфігурації. Від правильності реалізації диспетчерських функцій залежить здатність мережі протистояти відмовам. Диспетчеризація складає локальному і мережному рівнях.
► Локальна диспетчеризація здійснюється па рівні вузлів. Виробляється конфігурування і ініціалізація вузлів, управління рівнями лише на рівні вузла, виявлення несправностей і прямих помилок. Для локального диспетчера не потрібно посилати будь-які повідомлення через мережу. При включенні вузла локальний диспетчер конфігурує канальний рівень, наприклад, в мікросхемі CAN. Після виявлення несправності диспетчер намагається перезапустить і реконфігурувати канальний рівень. Перезапуск проводиться у разі різним алгоритмам, як показано на рис. 6.22. /
РИС. 6.22. Алгоритми перезапуску шини CAN
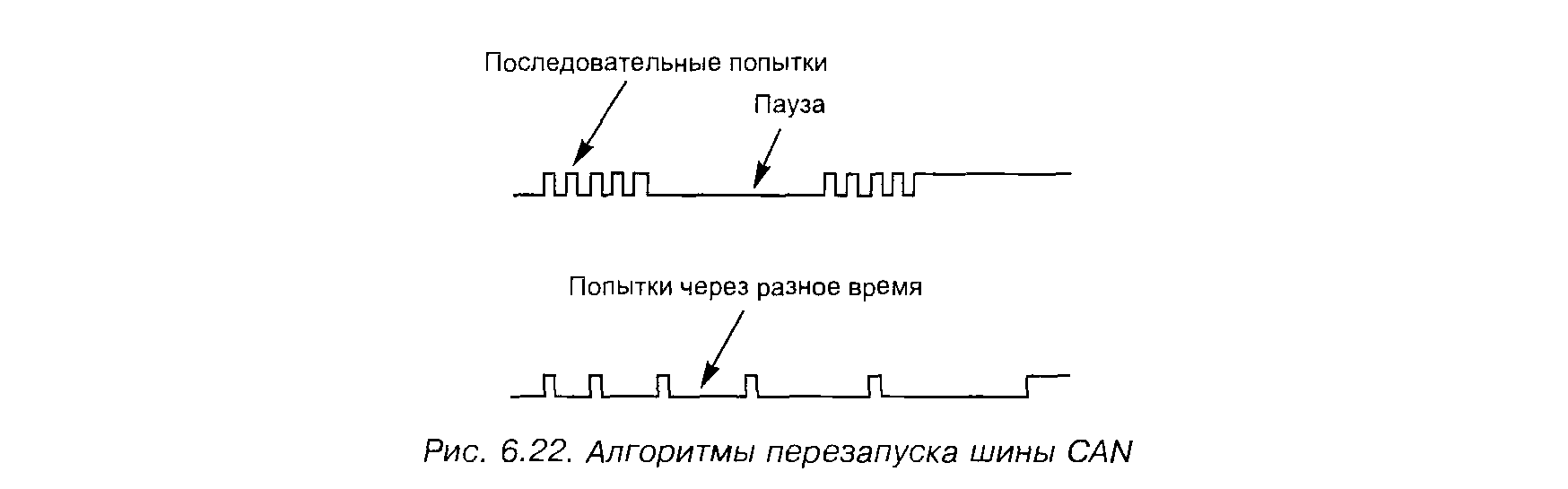
РИС. 6.22. Алгоритми перезапуску шини CAN
Диспетчеризація на мережному рівні забезпечує:
• визначення та контроль конфігурації мережі;
• включення мережі;
• перехід від неактивного до активної режимові і назад. Диспетчеризація виробляється централізовано чи децентралізованно. При централізованому підході один вузол виконує функції диспетчера мережі. На підвищення надійності системи має бути передбачений механізму передачі диспетчерських функцій іншому вузлу у відмові першого. При централізованому підході потрібно менше ресурсів, аніж за децентралізованому. При децентралізованому підході кожен вузол оснастили набором диспетчерських функцій. Вузли постійно обмінюються спеціалізованої диспетчерської інформацією. Мережа виявляється здатної продовжувати роботу, з менші можливості, навіть за відмову кількох вузлів.
6.5. Протоколи низького рівня (шинні)
► Конфігурація мережі може змінюватися залежно від потреб конкретного докладання. І тут вузли виконують різні завдання у залежність від конфігурації мережі. Є концепції, коли програмне забезпечення для елементів мультиплексної системи із зазначенням конфігурації завантажується з одною з вузлів при ініціалізації мережі. Вважають, що це до зменшення кількості типів ЭБУ. При виході з експлуатації однієї з вузлів втрачається інформація, що надходить від нього. Додаток має згенерувати втрачені дані самостійно, використовуючи аварійні значення.
6.5. Протоколи низького рівня (шинні)
Ці протоколи ставляться до двох нижнім рівням моделі ВОС: канальному й фізичного (рис. 6.23).
 РИС.
6.23. Протокол низького рівня
РИС.
6.23. Протокол низького рівня
На канальному рівні визначаються функції, необхідних надійної й ефективної передачі між вузлами одному й тому ж мережі. Це адресація, організація кадрів, виявлення помилок під час обміну даними у мережі. На фізичному рівні визначають електричні, механічні й інші фізичні характеристики інтерфейсу для підключення вузла у мережі. Розглядаються питання специфікації шинних з'єднувачів, мережевих адаптерів, кодування, синхронізації тощо. буд. Різні докладання пред'являють різні вимоги на фізичному рівні, у своїй основними параметрами під час проектування є:
• швидкість і відстань від передачі по шині;
• надійність;
• електромагнітна сумісність;
• відповідність стандартам і рекомендованої практиці;
• шинна топологія.
Канал зв'язку (електричні дроти чи оптичні кабелі) перебуває нижче фізичного рівня життя та в модель ВОС не входить (рис. 6.23). Прикладами протоколів низького рівня, розроблених спеціально для автомобільну промисловість, є: CAN (controller area network — Bosch, Intel), VAN (vehicle area network — Renault, Peugeot), VNP (vehicle network protocol
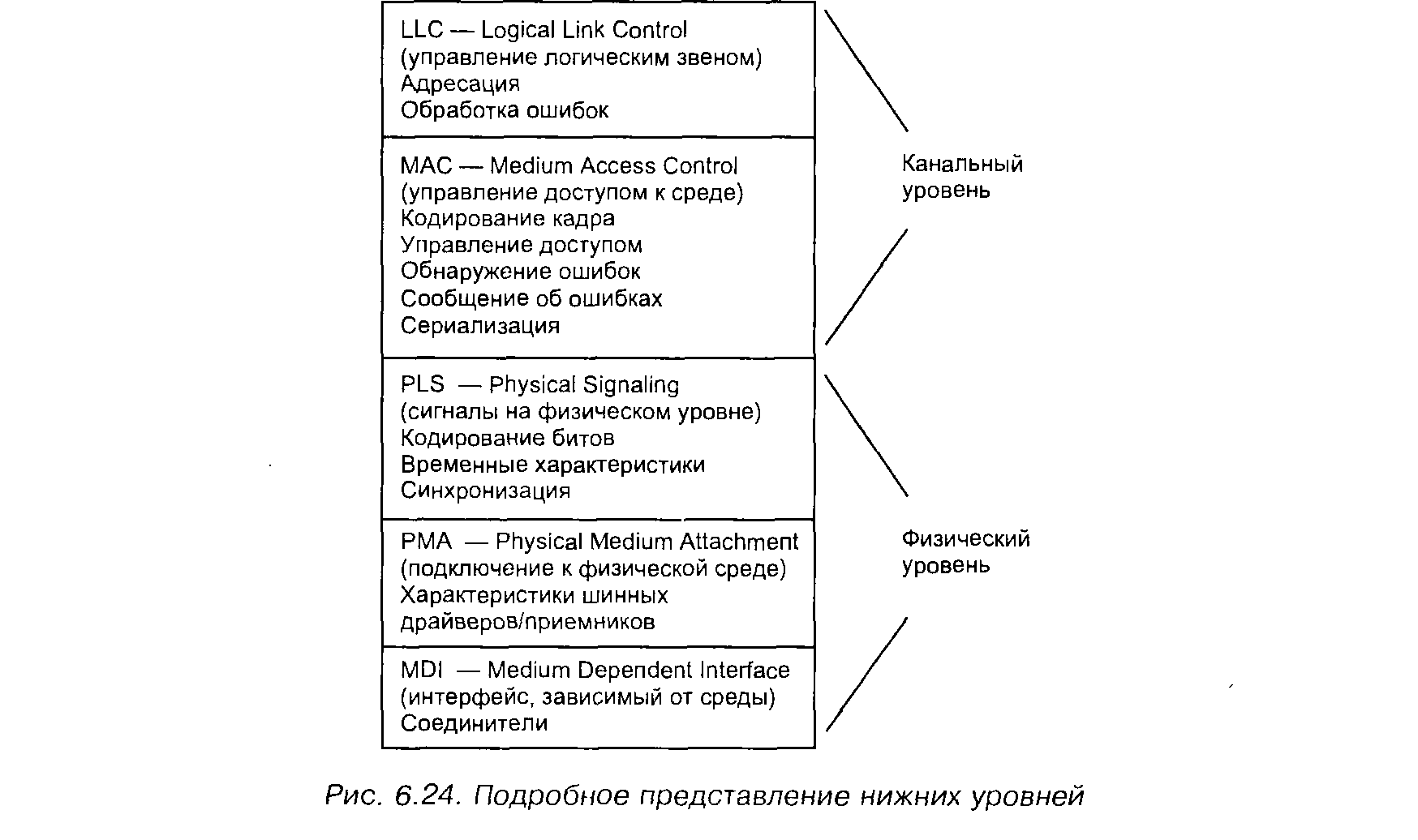
Рис. 6.24. Докладний уявлення нижніх рівнів
Ford). У локальних мережах персональних комп'ютерів часто застосовується протокол Ethernet, що у автомобільних системах немає. Зблизька протоколів низького рівня канальний і тяжка фізична рівні моделі ВОС додатково поділяються на підрівні, що дозволяє розглядати перебіг передвиборних процесів докладніше (рис. 6.24). 6.5.1. Канал зв'язку Канал зв'язку фізично з'єднує вузли, що у обміні даними під час передачі сигналів електричним, оптичним або іншим суб'єктам методом. Нижче наводяться приклади реалізації каналів зв'язку гаразд зростання їх вартості:
• одиночний провід;
• два дроти;
• вита пара;
• екранована вита пара;
• коаксіальний кабель;
• оптичний кабель;
• інфрачервоне випромінювання;
• радіоканал.
Інфрачервоне випромінювання і радіоканал передачі даних із шині всередині автомобіля нині не застосовуються. Устрою з цими передаючими каналами використовують із обміну даними між автомобілем і довкіллям, наприклад: дистанційне відмикання замків на дверях, включення охоронної сигналізації, отримання дорожньої інформації, попередження про зіткнення тощо. буд. Оптичні лінії зв'язку також що немає застосування в автомобільних мультиплексних системах. Оптичні кабелі, здатні експлуатуватися в температурному режимі, характерне для автомобіля, стоять дорого, ще, з їх допомогою важко реалізувати мережі з шинної топологією (зіркоподібна чи кільцева топологія реалізується простіше). Сьогодні у автомобільних мультиплексних системах інформація передається, зазвичай, дротами. Однопровідна схема використовується при низьких швидкостях обміну, трохи більше 10...20 Кбіт/сек. За більш високих швидкостях передачі застосовуються кручені пари екранування, у своїй зменшується паразитне електромагнітне випромінювання. При високих швидкостях обміну й малої потужності сигналу доцільно використання коаксіального кабелю. У цьому важливо враховувати удільні електричні характеристики каналу зв'язку, такі як: опір (Ом/м), згасання (dB/м), затримку поширення (нс/м), допустиму максимальну довжину лінії. Враховується також маршрут прокладки лінії зв'язку в автомобілі та максимальна довжина відводів до вузлам (для шинної топології).
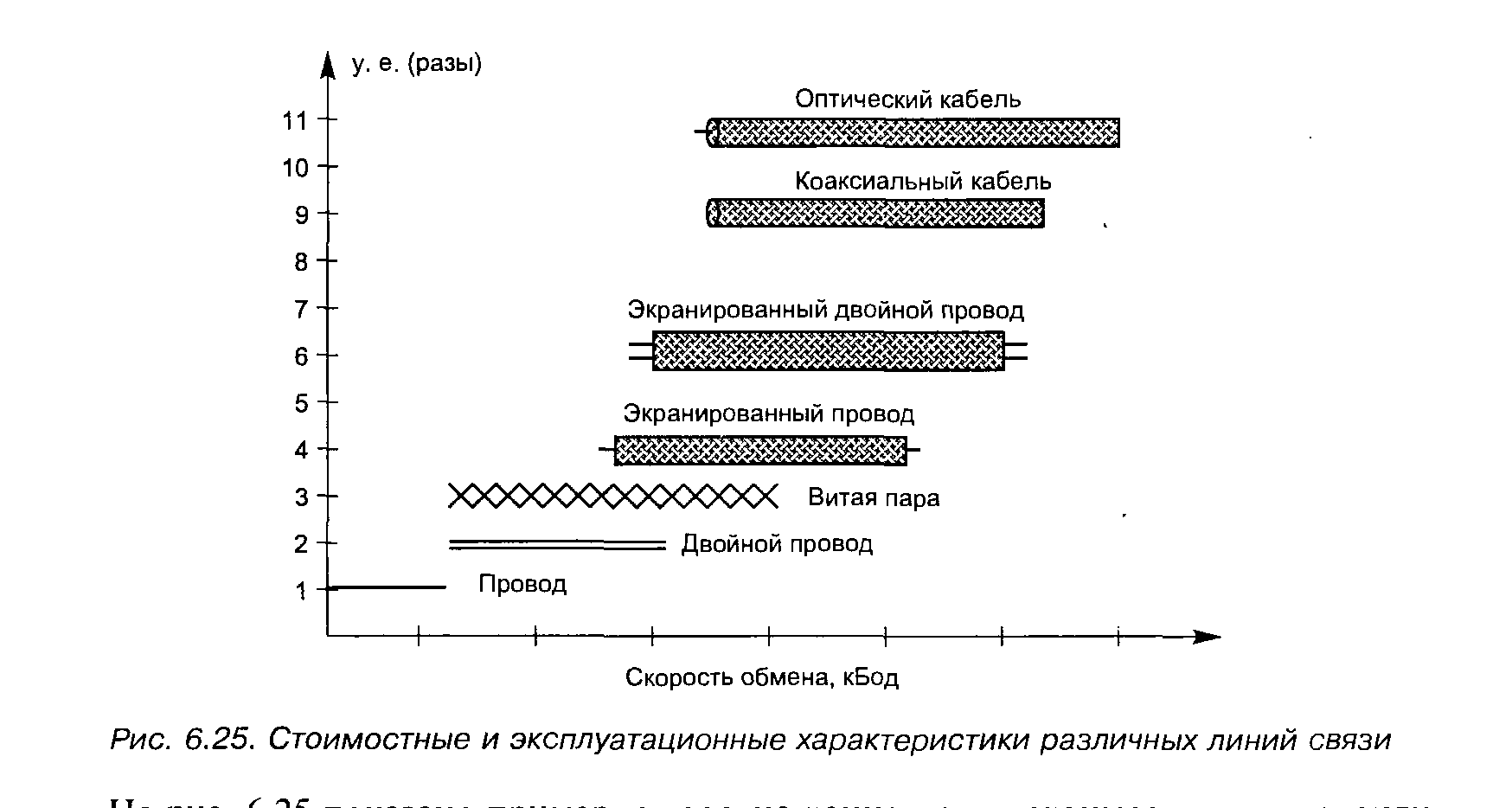
Рис. 6.25. Вартісні і експлуатаційні характеристики різних ліній зв'язку
На рис. 6.25 показано зразкову співвідношення між вартісними і експлуатаційними характеристиками різних ліній зв'язку. 6.5.2. Підрівні MDI і РМА У автомобільних мультиплексних системах сигнали передаються на відносно високої частоті і мають малу потужність. З огляду на це для з'єднувачів (рознімань) важливими параметрами на підрівні MDI є перехідний опір контактів, максимальна частота каналізації, можливість підключення екрана. На підрівні РМА фізичного рівня визначаються характеристики шинних драйверів (формувачів) і приймачів. Ємність передавальної лінії струмоформувальна здатність джерела сигналів обмежують довжину лінії, коли він можлива надійна передача. Так, ТТЛ-формувач може надійно працювати у лінії, довжина якої перевищує 70 див. Для розширення діапазону передачі використовуються спеціалізовані інтегральні мікросхеми — лінійні формувачі (драйвери) і лінійні приймачі (мережні адаптери). Ці устрою підключаються до лінії.
Випускаються різні типи формувачів: шинні формувачі RS-232 для однопровідної лінії, які мають низьку швидкість передачі (менш 20 Кбіт/сек) невеличкої допустиму довжину для лінії (менш 15 м); диференціальні формувачі RS-485, щоб забезпечити високу швидкість передачі (до 10 Мбіт/сек) і довжину лінії до 1 км. 6.5.3. Сигнали на фізичному рівні (підрівень PLS) На підрівні PLS розглядаються питання уявлення бітів, синхронізації, двійкове кодування. Коли комп'ютери і термінали розділені великими відстанями, є економічно вигіднішим запровадити тимчасову настроювання в сам сигнал, замість використовувати окремий канал синхронізації. Тобто домовилися до поняття з так званого самосинхронізуючого коду. З використанням кодів, які є самосинхронізованими, виникають проблеми, яка полягає у тому, що синхросигнал і такі можуть змінитися, коли поширюються за окремим каналам. Синхросигнал пришвидшується чи сповільнюється щодо інформаційного сигналу, що означає, що з приймача виникають проблеми з настроюванням приймання інформаційного сигналу, його захопленням. З використанням самосинхронізуючого коду яка набирає пристрій може періодично перевіряти себе, щоб у тому, що його запитує лінію точно у той самий момент, коли певний біт вступає у приймач. Це (в ідеальні умови), щоб лінія часто-густо змінювала свій стан. Найкращі синхронізуючі коди — це, під час використання яких стан лінії часто змінюється, оскільки ті зміни стану (наприклад, перепад напруги) дозволяють приймачу продовжувати налаштовуватися на сигнал.
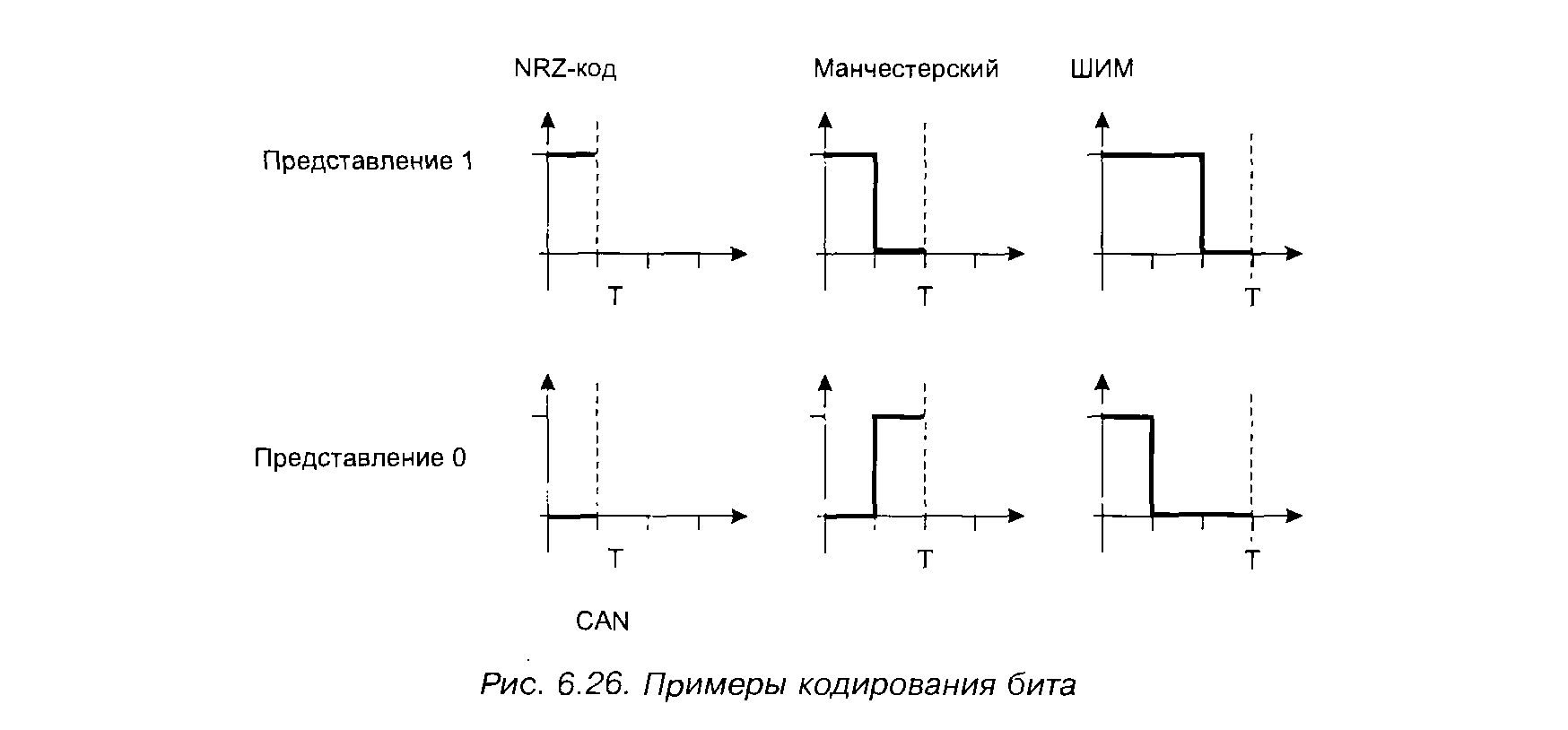
РИС. 6.26. Приклади кодування біта
Ідея у тому, щоб мати код до регулярних і частими змінами (переходами) рівнів сигналу в каналі. Переходи здійснюють поділ двійкових елементів даних (одиниць і нулів) в приймальнику, і логічні схеми постійно відстежують зміни стану у тому, либонь для виділення одиниці, і нулі з потоку бітів з метою настройки. Стробування зазвичай виробляється приймачем з вищої швидкістю, ніж швидкість зміни даних, щоб точніше визначити елементи даних.
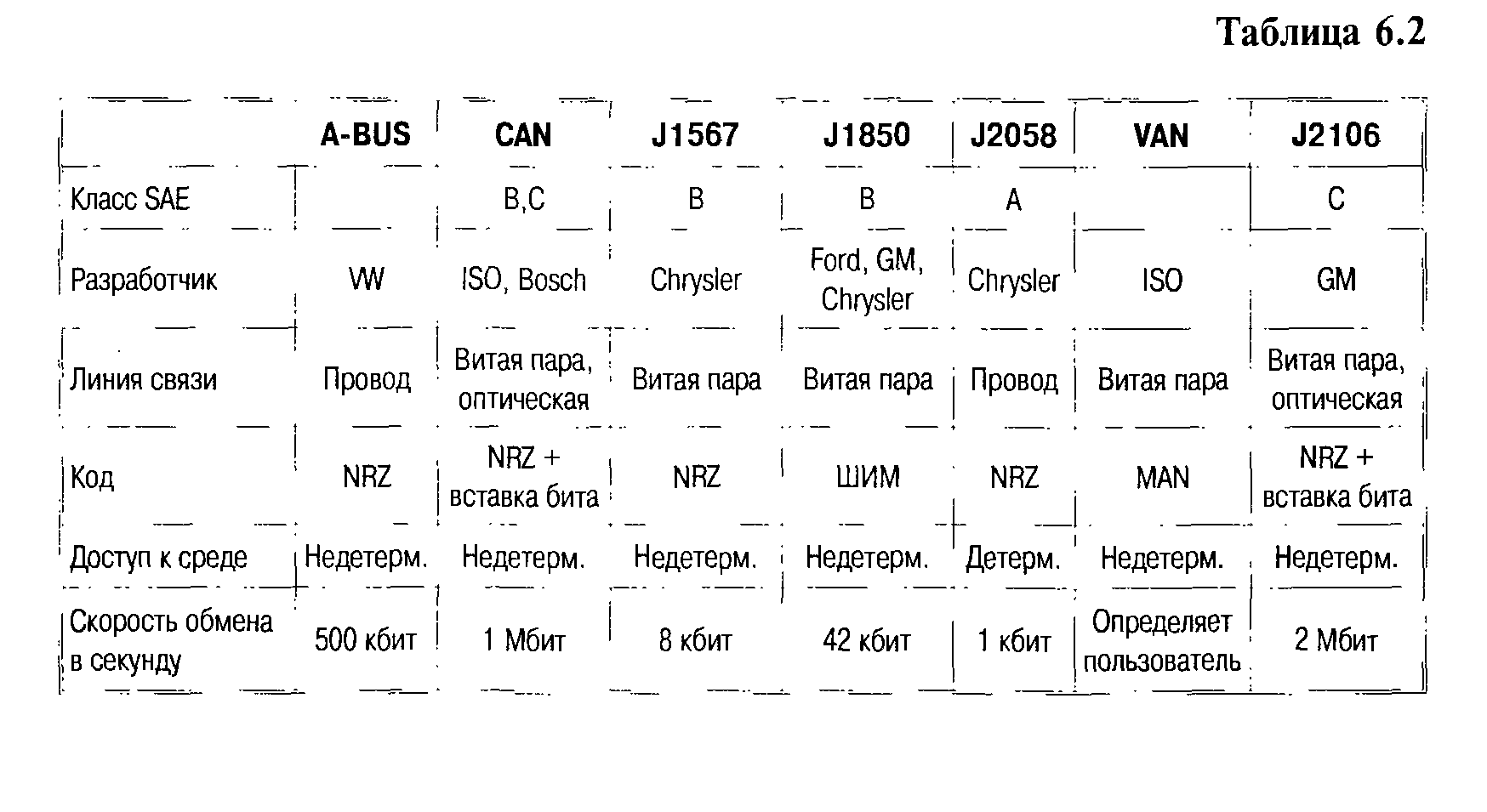
На рис. 6.26 показані способи уявлення бітів в системах кодування, що застосовуються у мультиплексних мережах. Тут Т — час до подання одного біта. Зауважимо, що реальні сигнали є такими прямокутними, з крутими фронтами, як показано на рис. 6.26. Для коду без повернення нанівець (NRZ-код) рівень сигналу постійний кожної послідовності однойменних бітів. І тут рівень сигналу залишається низьким для біта 0 зростає до деякого високого рівня напруги для біта 1 (у багатьох пристроях для 0 і одну використовуються протилежні по полярності значення напруги). Код NRZ широко використовується передачі даних внаслідок своєї відносної простоти і низької вартості. NRZ-код забезпечує дуже ефективне використання смуги частот, бо воно може представляти біт кожному за бода (зміни сигналу). Проте його недоліком є здібності самосинхронізації, оскільки довгі серії які йдуть поспіль одиниць і нулів не призводять до змін стану сигналу в каналі. У результаті може відбутися неузгодженість (дрейф) таймера приймача стосовно поступаю чому сигналу і невчасний опитування лінії, передавач і приймач можуть фактично втратити взаємну синхронізацію. NRZ-код то, можливо полярним і біполярним залежно від конкретної реалізації. Код з поверненням нанівець (RZ-код) передбачає, що у поданні кожного біта сигнал змінюється по меншою мірою одного разу. Оскільки RZ-коди забезпечують зміна стану кожному за біта, ці коди мають дуже хорошими властивостями синхронізації. Основна хиба RZ-кода у тому, що він потребує двох переходів (змін) сигналу кожному за біта. Отже, RZ-код зажадає вдвічі більшої швидкості (в бодах) проти звичайним кодом. Як приклад RZ-кодів малюнку 6.26 показані манчестерський код і широтноімнульсна модуляція. У автомобільної мультиплексної шині CAN використовується NRZ-код. 6.5.4. Управління доступом до середовища (підрівень MAC) Локальні мережі звичайно є рівноранговими, тобто статус всіх вузлів однаковий, вони теж мають рівних прав на доступ до мережі. З іншого боку, лише одне вузол може передавати дані до мережі у будь-якій конкретний час. Необхідний механізм контролю за доступом до шині (середовищі), що й реалізується на підрівні MAC. Метод доступу CSMA/CD (Carrier Sense, Multiple Access with Collision Detection) — метод множинного доступу з контролем несучою і виявленням колізій. Коли на те чи інше пристрій готова до передачі даних до мережі, воно видає на шину запит для перевірки того і не передаються вже через мережу будь-які дані. Якщо мережу зайнята, контролер чекає протягом деякого довільного інтервалу часу, як виконати ще однієї спроби передати дані. Якщо лінія мережі досі зайнята, контролер чекатиме кілька довше до наступній спроби. Оскільки кожна контролер у мережі чекає протягом довільного, випадково обраного інтервалу часу, можливість, що це устрою приймуть з шини призначені їм повідомлення, зростає. Щоб виключити зіткнення, контролер, передаючи дані, неперервно контролює стан шини. Якщо контролер виявляє, що у шині вже є дані, передані не їм, він доходить висновку, що зіткнення, швидше за все, вже сталося, і призупиняє передачу. Оскільки і той контролер, що передав дані, які зіткнення, постійно затребувана шину, він також припиняє передачу. Обидва контролера після очікують протягом довільного інтервалу часу, як спробувати знову передати весь блок даних. Обрана у випадковому порядку тривалість періоду очікування підвищить ймовірність те, що обидва контролера передати дані через мережу без повторного зіткнення. Якщо він все-таки відбувається, середня тривалість періоду очікування збільшується. Метод доступу CSMA/CD-A відрізняється від CSMA/CD наявністю арбітражу при колізіях, що використовують у CAN, VAN, VNP та інших автомобільних шинних протоколах. Кожен пакет даних, рухаючись завітай, постачається пріоритетом. Якщо ви трохи вузлів одночасно намагаються вести передачу даних, вузли, передають дані з нижчими пріоритетами, знайдуть колізію і припинять передачу. Вузол, дані від якого мають найвищий пріоритет, продовжить передачу. Пропускна здатність мережі з побітним арбітражем при колізіях теоретично воно може використовуватися на 100%. Насправді це недосяжно через затримки передачі пакетів даних із низьким пріоритетом. Недоліком методу доступу CSMA/CD є припинення передачі всіх повідомлень для виявлення колізії. Метод CSMA/CD-A дозволяє продовжити безупинно передачу найважливішою інформації. Реалізація методу CSMA/CD-A передбачає, що час затримки для лінії зв'язку становить малу частину від часу передачі одного біта інформації. Це обмежує максимальну довжину лінії для заданої швидкості передачі. Наприклад, максимальна довжина електричної лінії для леалізації CAN-протокола зі швидкістю передачі 1 Мбіт/сек трохи більше 40 метрів. Обмін даними в автомобільних мультиплексних системах може здійснюватися різноманітні протоколів, які зведені в табл. 6.2.