

Глава 6. Автомобільні мультиплексні системи передачі
6.1. Поняття про автомобільних мультиплексних системах
Останні 20 років значно зросла складність автомобільної електропроводки. Сьогодні виготовлення автомобільного джгута дротів проблема за його ж розмірів та ваги. У сучасному автомобілі може бути більш 1200 окремих дротів. Наприклад, джгут, що йде до дверей водія, містить 50 дротів; джгут, підходящий до приладовому щитку — близько 100 дротів. Крім збільшення ж розмірів та ваги, велика кількість дротів і з'єднувачів погіршує надійність. По вартості автомобільний джгут дротів займає четверте місці після кузова, двигуна і трансмісії. Зростає кількість систем автомобіля, мають автотронне управління, як-от:
• автотронне управління двигуном;
• автотронні антиблокувальні системи;
• автотронне управління коробкою передач:
• автотронне управління клапанами;
• активна підвіска.
Ці системи у тому чи іншою мірою пов'язані одне з одним. Вихідні сигнали деяких датчиків можна використовувати кількома електронними системами. Можна також використовувати один комп'ютер керувати усіма автомобільними системами. Але сьогодні й у майбутньому це економічно недоцільно. Починає втілюватися у життя інше технічне рішення, коли контролери окремих електронних блоків управління (ЭБУ) зв'язуються друг з одним комунікаційної шиною обмінюватись даними. Датчики і виконавчі механізми, підключені цієї шині через спеціальні согласующие устрою, стають доступними всім ЭБУ. Це не що інше, як локальна обчислювальна мережу (ЛВС) на борту автомобіля. Термін «мультиплексний» широко використовують у автомобільну промисловість. Зазвичай його належать до послідовним каналам передачі між різними електронними пристроями автомобіля. Кілька дротів, якими передаються управляючі сигнали, замінюються шиною обмінюватись даними. Зменшення кількості дротів в електропроводці автомобіля — однією причиною розробки мультиплексних систем. Інша причина — необхідність об'єднання ЛВС контролерів різних ЭБУ для ефективнішої роботи і діагностики. На рис. 6.1 показано традиційна схема електропроводки і мультиплексна система. Мультиплексні системи значно різняться від. Зазначимо деякі відмінності, очевидні з мал. 6.1. і. У звичайних системах електропроводки інформація, і харчування передаються з одних і тим самим дротах. У мультиплексних системах сигнали і електроживлення розділені. 127
Глава 6. Автомобільні мультиплексні системи передачі
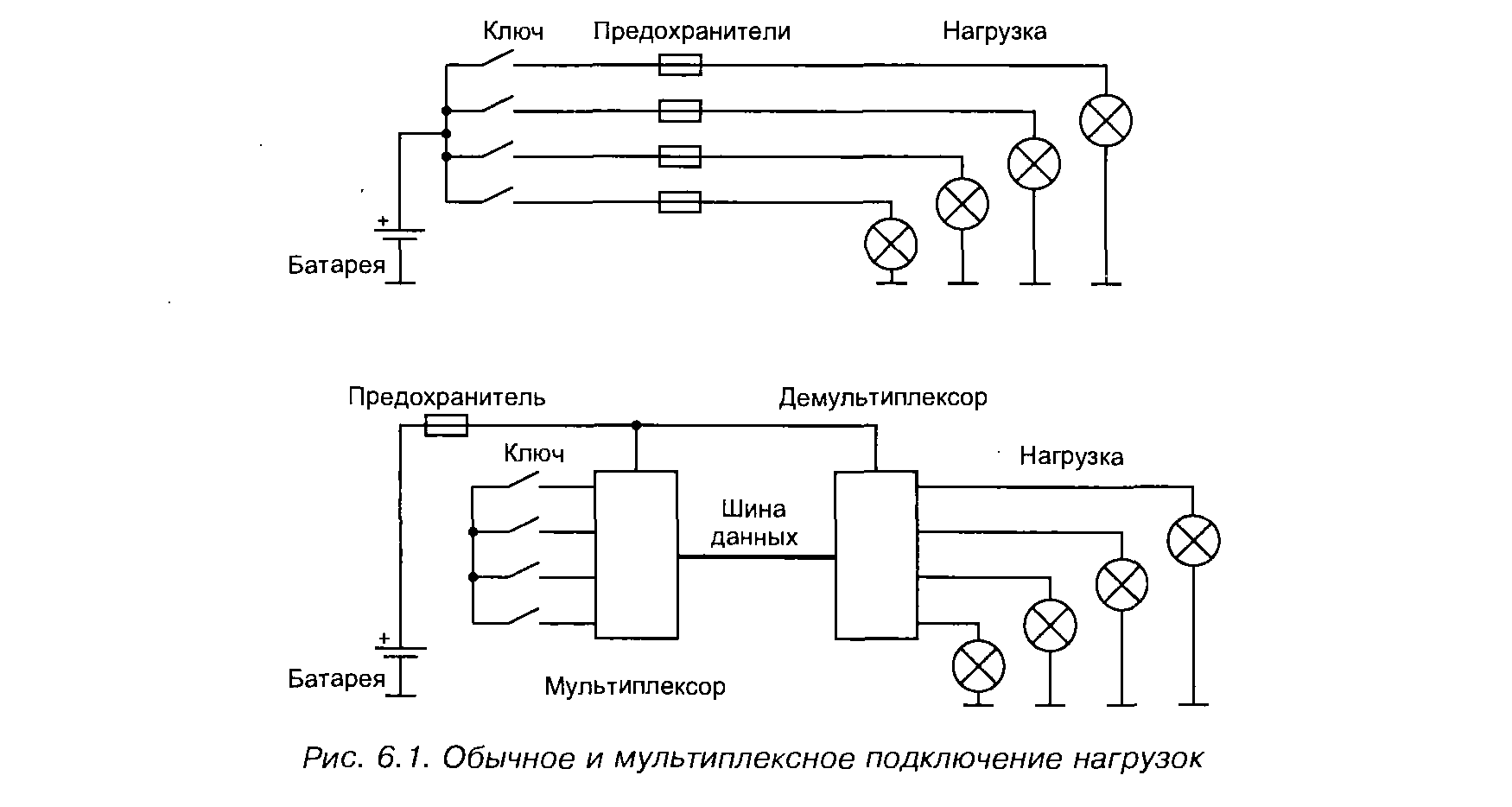
Рис. 6. 1. Звичне і мультиплексне підключення навантажень
2. У мультиплексних системах управляючі ключі безпосередньо не включають і виключають електроживлення навантажень. 3. У окремих випадках електронна схема вузла повинна постійно зчитувати стан управляючого ключа, коли більшість електроустаткування обезструмлена. Наприклад, становище ключа центрального замку дверей має визначатися і за паркуванні, коли багато системи відімкнено із міркувань енергозбереження. По схемою рис. 6.1 може бути реалізований електроживлення корпусних споживачів: висвітлення, склопідйомники, омивачі тощо. буд. Електропроводка спрощується з допомогою приймання та передачі різних сигналів між вузлами за однією й тією самою шині (дроту). При звичайній схемі проводки для реалізації кожної функції потрібно окремий провідник. Через вузли здійснюється доступом до мережі. Вузол, зазвичай, містить мікропроцесор, підключений до комутаційної шині, і електронні ланцюга, управляючі роботою датчиків і виконавчих механізмів, підключених до вузлу. Комунікаційна шина на сучасному автомобілі найчастіше є кручену пару дротів, хоча можливі й інші виходи (див. 6.2.3). На рис. 6.2 загалом показана мультиплексна система.
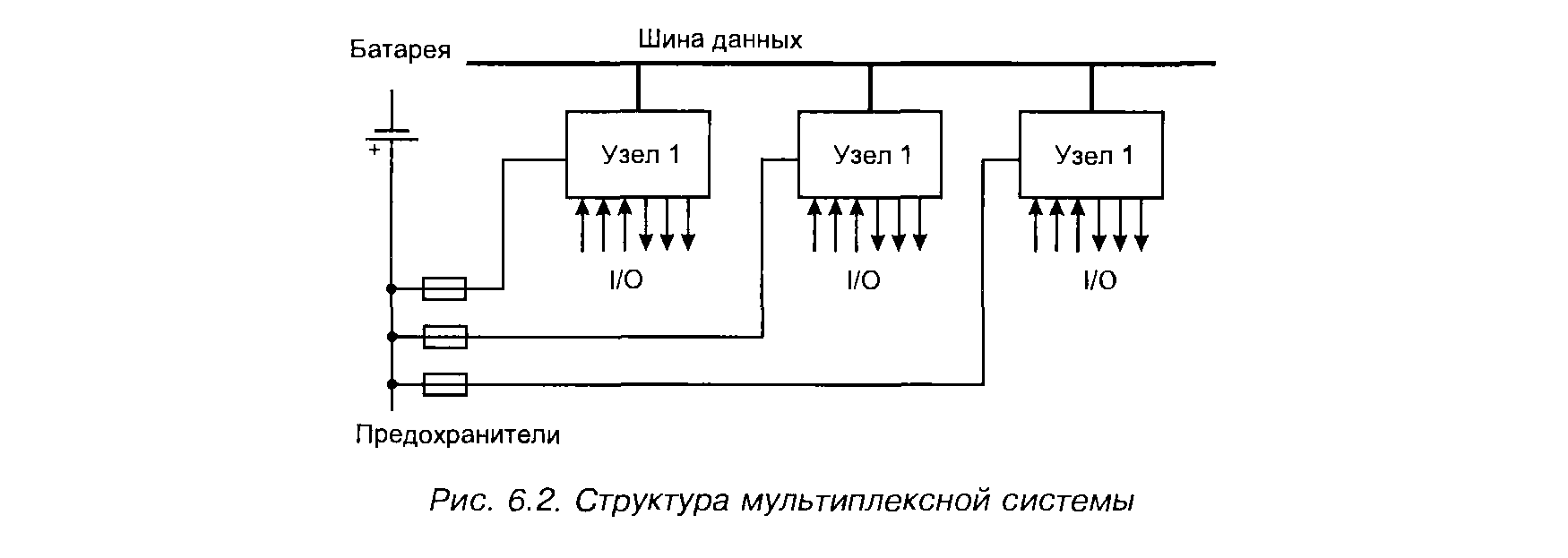
Рис. 6.2. Структура мультиплексної системи
6.2. Локальні обчислювальні мережі До входам вузлів можуть підключатися будь-які датчики, до виходам виконавчі устрою. Приклади вхідний інформації: температура, струм, напруга, становище перемикачів тощо. буд. Приклади виконавчих пристроїв та правових механізмів: дисплеї, електроклапани, електродвигуни тощо. п. SAE (Society of Automotive Engineers — міжнародне суспільство автомобільних інженерів) ділить мультиплексні автомобільні системи втричі класу:
1. Клас А. Мультиплексні системи, у яких автомобільна електропроводка спрощується з допомогою використання комунікаційної шини. З цієї шині між вузлами передаються сигнали, які відбуваються по роздільним дротах в автомобілі зі звичайною електропроводкою. Вузли, є частиною мультиплексної системи, при звичайній електропроводці відсутні.
2. Клас У. У мультиплексній системі між вузлами передаються інформаційні дані (зазвичай значення параметрів), ніж досягається усунення надмірності датчиків та інших елементів проти звичайній схемою електропроводки. І тут вузли є і у звичайній системі, як незв'язаних елементів.
3. Клас З. Мультиплексна система дуже швидко обмінюється даними, що здійснює управління часі, наприклад, двигуном, антиблокувальною системою та т. буд. Системи класу А йдуть на включення/виключення різних навантажень (наприклад, керувати елементами двері салону), швидкість передачі але шині трохи більше 10 Кбит/сек. У системах класу У здійснюється обміну інформацією між підсистемами, коли потрібно швидкість передачі 100...250 Кбіт/сек. Нині системи класу У використовуються автомобілем частіше від інших. Обмін даними в системах класу У відповідає вимогам стандарту J1850 (10...40 Кбіт/сек, США, Японія) чи протоколу VAN (vehicle area network — автомобільна локальна мережу), 125 кбіт/сек, підтримуваного французькими фірмами Renault і Peugeot. Завдання систем класу У можна вирішити, застосувавши шипу CAN (controller area network — локальна мережу контролерів), але па сьогодні це тільки економічно недоцільно. У системах класу З здійснюється розподілене управління реальному масштабі часу, швидкість обміну даними близько 1 Мбіт/сек. Шина CAN є стандартом для мультиплексних систем класу З. Найбільші виробники автомобільного електронних приладів (Bosch, Delco) та українських комплектуючих (Intel, Motorola) підтримують CAN.
6.2. Локальні обчислювальні мережі
6.2.1. Еталонні моделі взаємодії систем
Для визначення завдань, поставлених перед складної технічної системою, і навіть виділення головних характеристик і параметрів, які вона повинна мати, створюються загальні моделі таких систем. Загальна модель обчислювальної мережі визначає характеристики мережі загалом і характеристики і функції входять до неї основних компонентів. Розмаїття варіантів обчислювальних мереж, і мережевих програмних продуктів поставило проблему об'єднання мереж різних архітектур.