

Глава 5. Спеціалізовані бортові системи автомобілів
Потім робиться порівняння, як показано на рис.
5.22. Вибирається найбільш підходяща дорогу й коригуються координати автомобіля за картою. Коли автомобіль сягає перехрестя, вибір дороги визначається напрямом руху (рис. 5.23). Якщо дороги на перехресті виглядають приблизно однакове, як у рис. 5.23, навігаційний комп'ютер простежує їх за карті уперед і визначає коефіцієнт кореляції кожної з доріг стосовно необхідному маршруту. Вибирається дорога з найбільшим коефіцієнтом кореляції. 5.8.2. Вибір оптимального маршруту Крім визначення поточних координат автомобіля, навігаційна система він може видавати інформацію, яка полегшує вибір оптимального шляху до місцеві призначення. І тому навігаційний комп'ютер розглядає дорожню мережу між вихідним пунктом і пунктом призначення і вибирає найкоротший маршрут. Прикладом методу визначення найкоротшого шляху за картою є алгоритм Дейкстра (Dijkstra algorithm). У алгоритмі Дейкстра виробляється визначення всіх перетинань шляхів стартовою крапки й обчислюються найкоротші шляху до кожної точки перетину. Наприклад, якщо є дорожня мережу, як у рис. 5.24, а, пошук перетинань розпочнеться від початковій точки Л, як показано па рис. 5.24, б. Спочатку розглядатимуться перетину У і З. Відстані від точки До кожного із перетинань вказані всередині кружечків. Потім розглядаються перетину Є. і F, з'єднані до точки З, тих перетинань зазначено відстань стартового точки А (рис. 5.24, б (2)). По-третє, розглядаються перетину D та О, з'єднані до точки У, на рис. 5.24, б (3) вказані відстані стартового точки До D та О. У цьому відстань до точки Є зазначено через точку З, т. до. воно менше, ніж через D (було б 8). Крапка D пов'язані з точкою Є, і маршрут через Є виявляється коротше, відображено на рис. 5.24, б (4). Найкоротшим шляхом до D виявляється маршрут A-C-E-D. Отже для дорожньої мережі можна визначити найкоротший маршрут до кожного з перетинань (жирні лінії па рис. 5.24, б (6)). Використання цього алгоритму дозволяє визначити найкоротший маршрут доречно призначення. Маючи сучасної навігаційної системою, водій може побоюватися збитися зі шляху.
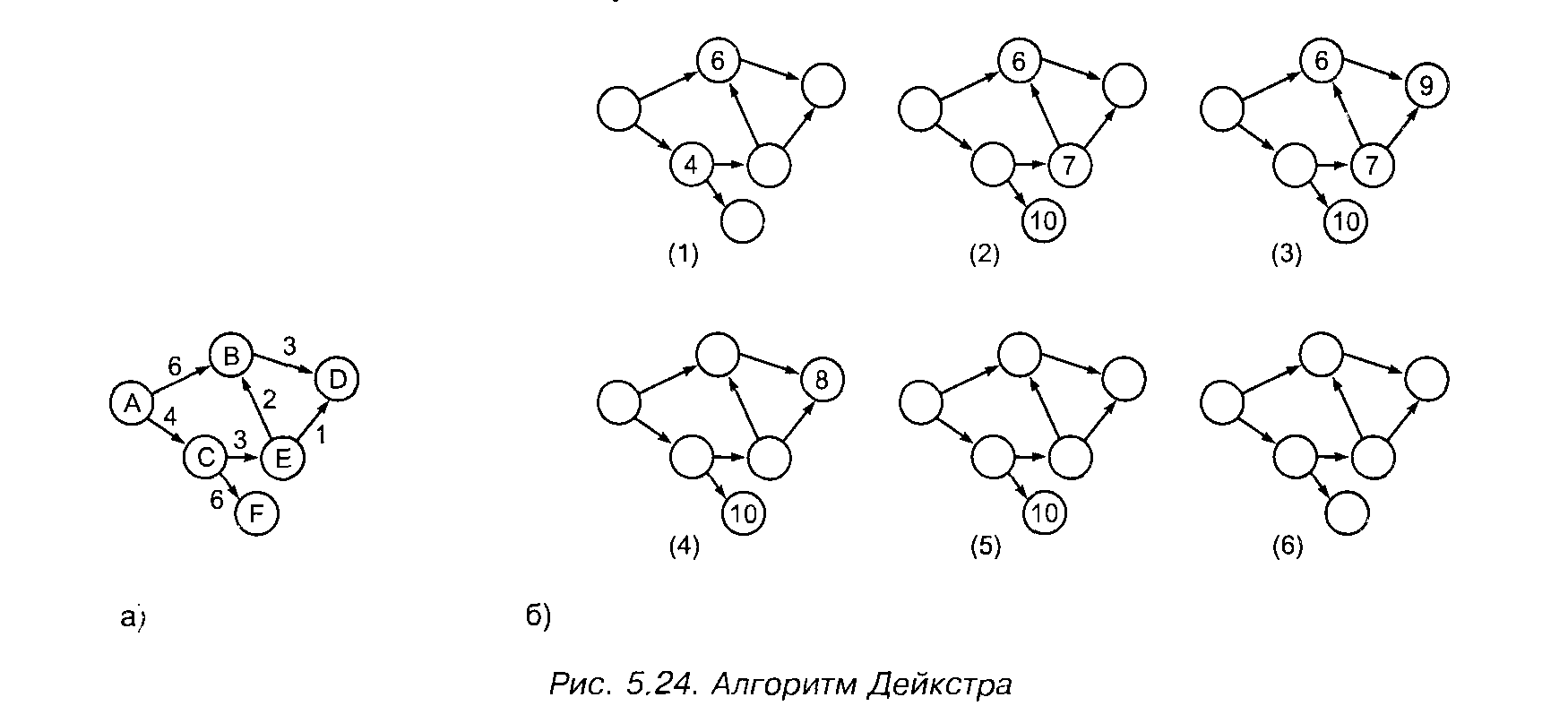
РИС. 5.24. Алгоритм Дейкстра
5.9. Супутниковий позиціонована система GPS
Навігаційна інформація повідомляється водієві у різний спосіб: від вказівки символом становища на карті місцевості до команд голосом через синтезатор розмови про необхідності повернути наліво чи направо.
Система GPS (рис. 5.25) можна використовувати визначення абсолютних координат автомобіля. Воно складається з 18 основних та 3 запасних супутників на навколоземних орбітах (радіус 20183 км, період обертання 12 годин), запущених міністерством оборони США період із 1980 по 1992 рік (програма NA-VSTAR), і покликана служити поставляти інформацію про абсолютних координатах різноманітних об'єктах: морським судам, літакам, ракет, військовим підрозділам, автомобілі й т. буд. На супутниках встановлено атомні годинник, періодично на Землю посилаються сигнали з туристичною інформацією про системному часу й пара
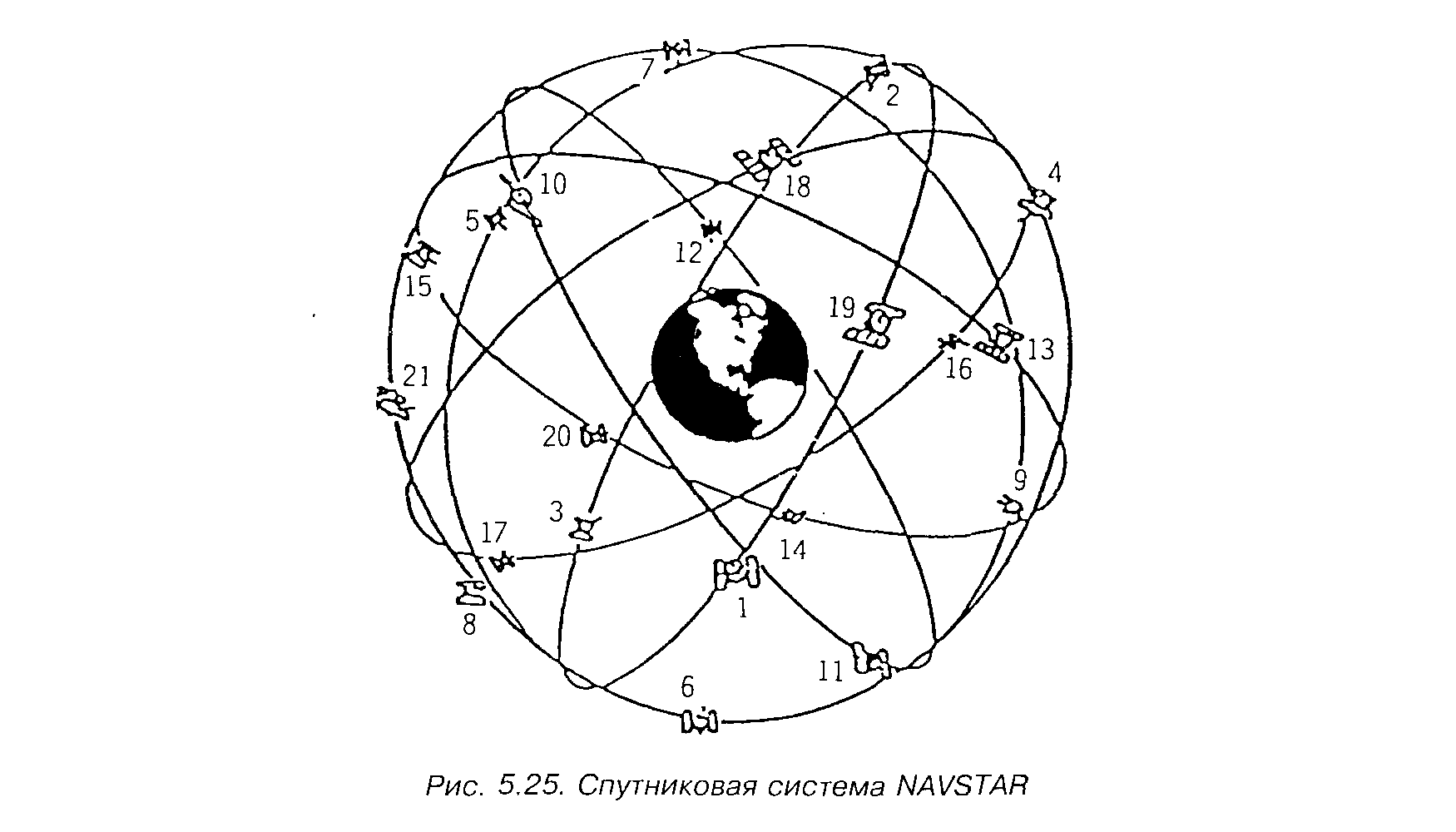
Рис. 5.25. Супутниковий система NAVSTAR
Користувачі обслуговуються системою GPS за двома категоріями: точне виявлення координат (Precise Position Service — PPS) — для військових і стандартна точність визначення координат (Standard Position Service — SPS) — для інших категорій користувачів, зокрема й у автомобільної навігації. Теоретично досяжним точність визначення координат з помилкою до 100 м, па практиці координати визначаються з більшою точністю — до 30 метрів. Координати приймача (X,Y,Z) і супутника (Ui,Vi,Wi) пов'язані співвідношенням:
![]() Тут
Pi — відстань між супутником і приймачем,
R — тимчасова помилка, що виникає через
неможливість точно синхронізувати
атомні годинник 111
Тут
Pi — відстань між супутником і приймачем,
R — тимчасова помилка, що виникає через
неможливість точно синхронізувати
атомні годинник 111