

Глава 5. Спеціалізовані бортові системи автомобілів
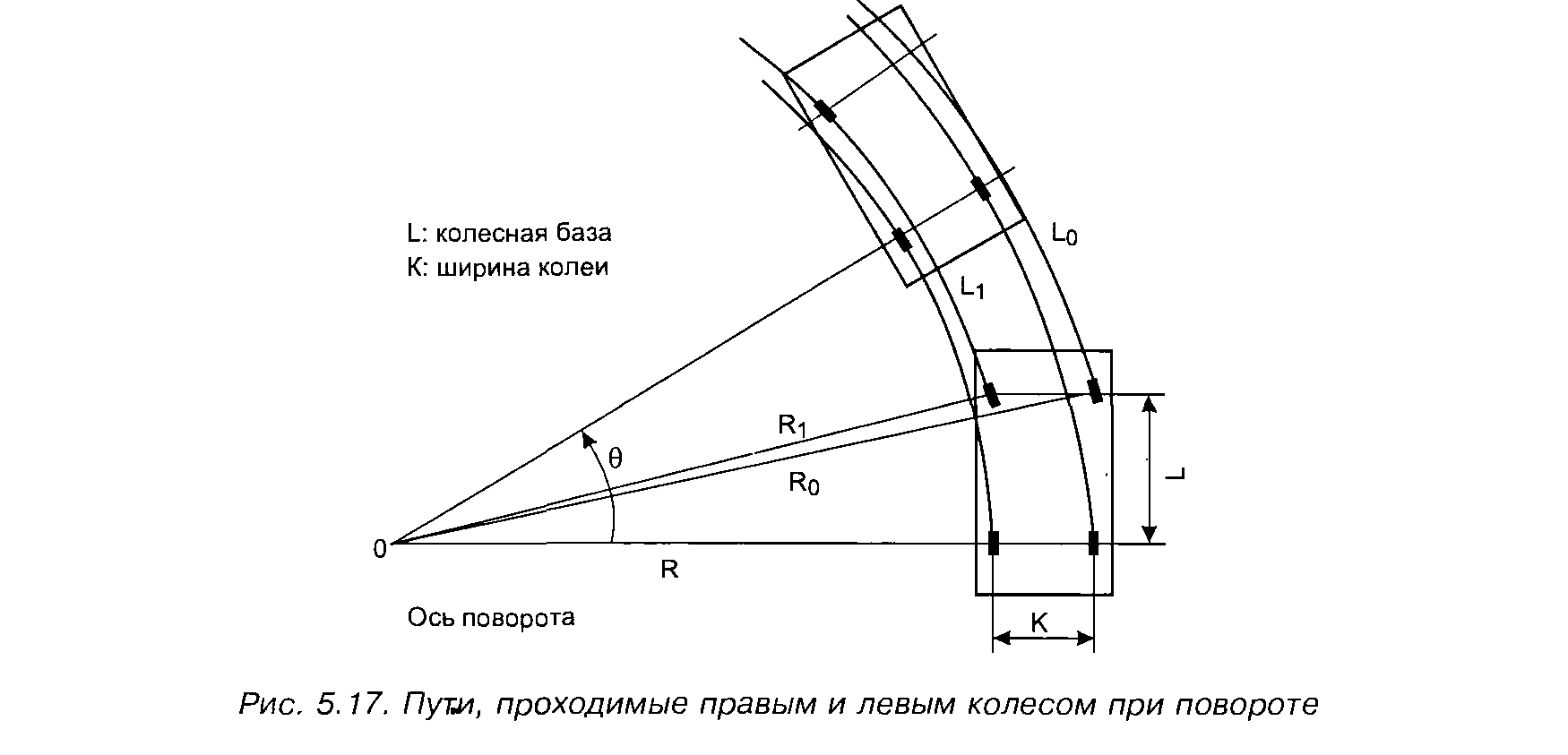
РИС. 5.17. Пугм, проходить правим і лівих колесом при повороті передніми колесами, різняться становлять:
Колісна база L і ширина колії До відомі для даного автомобіля, шляху правого і лівого коліс вимірюють з допомогою датчиків швидкості обертання коліс. Тоді кут повороту 0 обчислюється за такою формулою: 0 = L,//?, = LJ^R2 + L2 . Склавши все поворотні кути, можна знайти й кут повороту автомобіля для заданого шляху стартового точки.
5.6.4. Гіроскоп
З використанням гироскопа визначається кутова швидкість автомобіля на повороті і інтегрується визначення кута повороту. У навігаційних системах використовуються різні типи гіроскопів, тут розглядається застосування газового гироскопа. Пристрій працює так. Насос створює потік гелію із швидкістю закінчення і спрямовує її через сопло на дві нагріті зволікання датчика. Кутова швидкість автомобіля визначається зі зміни опорів зволікань датчика. Коли натовп гелію виходить із сопла насоса, поволі
5.7. Навігаційне числення
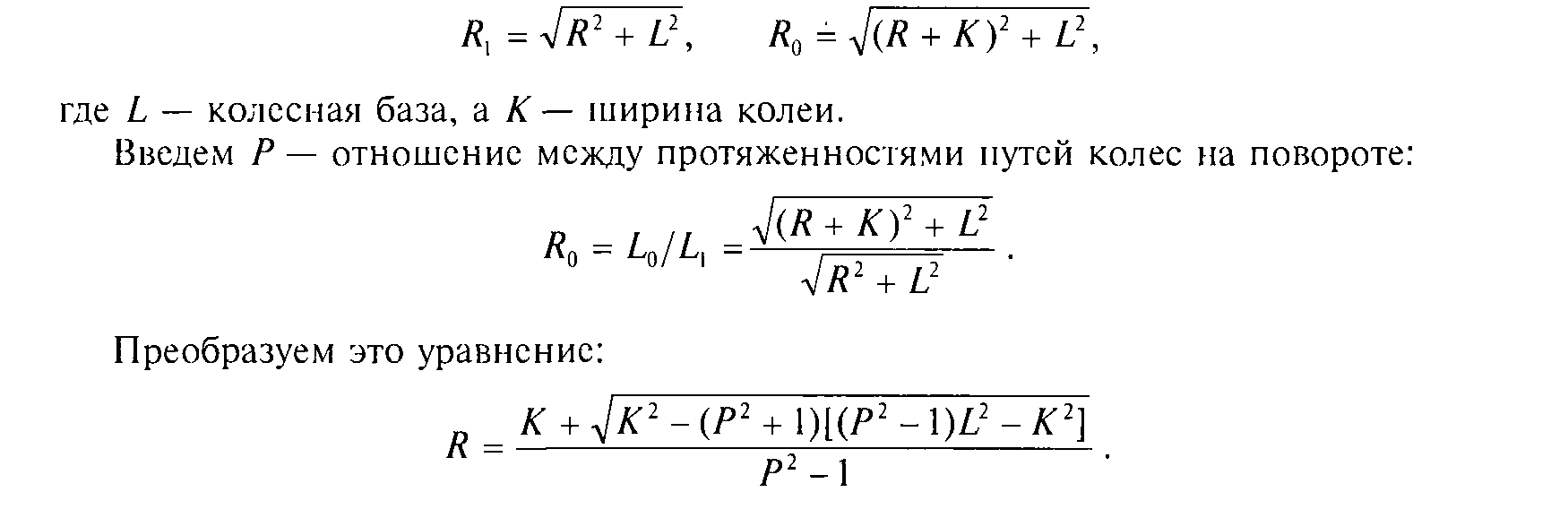
стей серед газу перерізу біля зволікань показано на рис. 5.18. Wi W2 Координати зволікань
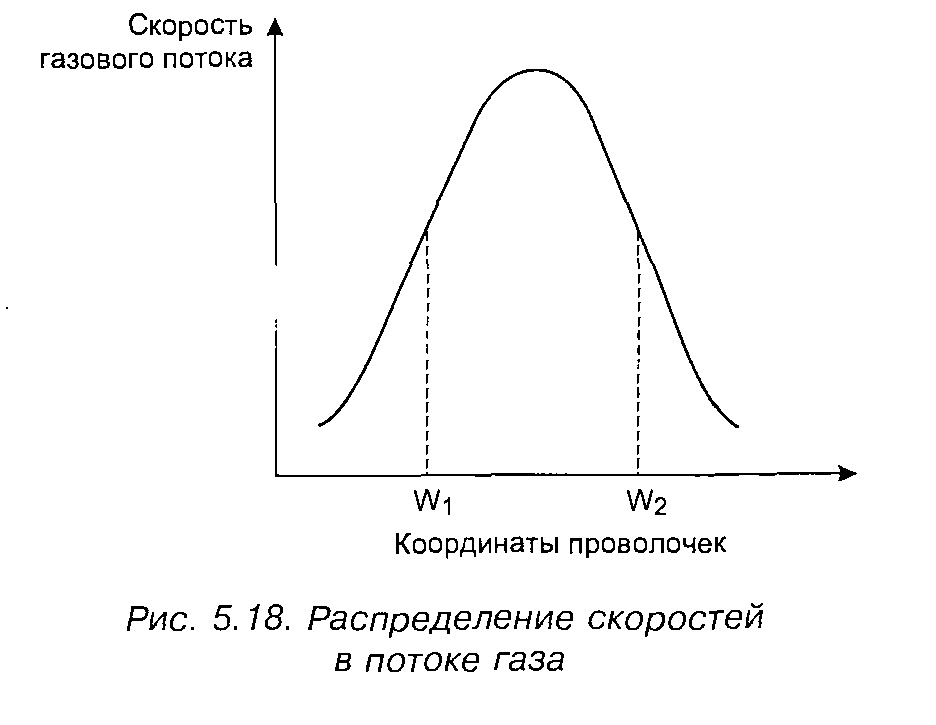
РИС. 5.18. Розподіл швидкостей серед газу Коли автомобіль рухається прямо, розподіл швидкостей симетрично щодо зволікань, вони розладнуються однаково не вдома бруківці схеми, частиною якого є зволікання, кульовий напруга (рис. 5.19). При повороті виникає сила Кориолиса, змітає газовий потік, зволікання розладнуються нерівномірно, їх опору електричному струму різні, не вдома бруківці схеми з'являється напруга, пропорційне кутовий швидкості автомобіля на повороті.
Рис. 5.19. Вимірювальна схема
Навігаційне числення — це метод визначення координат рушійної об'єкта (автомобіля, літака, судна тощо. буд.) стосовно стартовою точці. Використовується сума векторів пройдених відстаней, інформацію про напрямах надходить із датчика азимута чи датчика швидкості обертання коліс. На рис. 5.20 показано застосування навігаційного числення до визначення координат об'єкта (автомобіля).
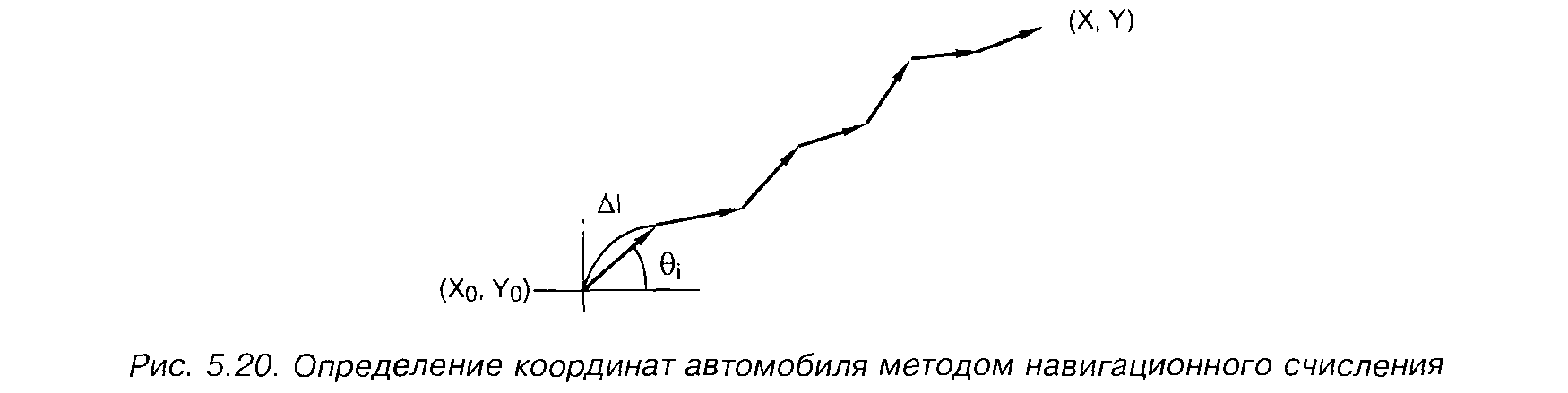
Рис. 5.20. Визначення координат автомобіля методом навігаційного числення
Глава 5. Спеціалізовані бортові системи автомобілів Відстань стартового точки (x0,y0) визначається за такою системі рівнянь:
Отже, поточні координати автомобіля можуть визначити, якщо відомо становище стартовою крапки над карті. Напрямок руху автомобіля зазвичай визначається по феромагнітному датчику азимута (компасу). Корпус автомобіля виконано із горіхового металу та інших магнітних матеріалів і може намагнітиться зовнішніми полями (наприклад, у магнітному полі, утворюваному електродвигунами електровоза па залізничному переїзді тощо. буд.). І тут виникає систематична похибка у визначенні напрями руху автомобіля. Паразитне магнітне полі компенсується додатковими магнітами поблизу компаса. Магнітне полі також спотворюється в тунелях, на металевих мости, на своєму шляху вздовж автопоїздів. Застосування датчиків швидкості обертання коліс поруч із компасом часто вирішує цієї проблеми. Датчики швидкості обертання коліс не чутливі до таких спотворень, практично датчики азимута і швидкості обертання коліс доповнюють одна одну визначенні напрями руху автомобіля. Навігаційне числення дає низьку точність визначення поточних координат об'єкта. Для автомобіля доводиться коригувати координати, певні методом навігаційного числення кожні 10...15 км. На щастя, автомобілі зазвичай пересуваються дорогами, які завдані карті. 5.8. Електронні карти У деяких навігаційних системах картографічна інформація зберігається централізовано і передається на автомобіль радіоканалом, але переважно випадків навігаційна система припускає наявність необхідної бази даних на борту автомобіля. CD-ROM використовується для зберігання картографічної та "дорожньої інформації з єдиною метою порівняння конфігурацій шляхів та пройденого шляху, пошуку оптимального маршруту, виведення карти місцевості на дисплей. Значна ємність CD (до 600 МБ) дозволяє це робити. Картографічна інформація чи електронні карти перебувають у двох основних форматах: матричному і векторному. У матричному форматі кожному елементу карти (пикселю) відповідають свої значення декартових координат X—Y. Матричні карти вимагають велике місце у пам'яті комп'ютера чи носії інформації та незручні для математичних операцій під час прокладання і спостереженні над маршрутом. У векторному форматі дороги, вулиці видаються послідовностями відрізків прямих, описаних аналітично, перетину — вузлами (рис. 5.21). Вузли ідентифікують координатами — довготою і широтою. Якщо дорога (вулиця) не пряма, у точці зламу також поміщається вузол. Отже, дороги (вулиці) будь-який конфігурації аппроксимуются набором векторів та вузлів. 108
5.8. Електронні карти
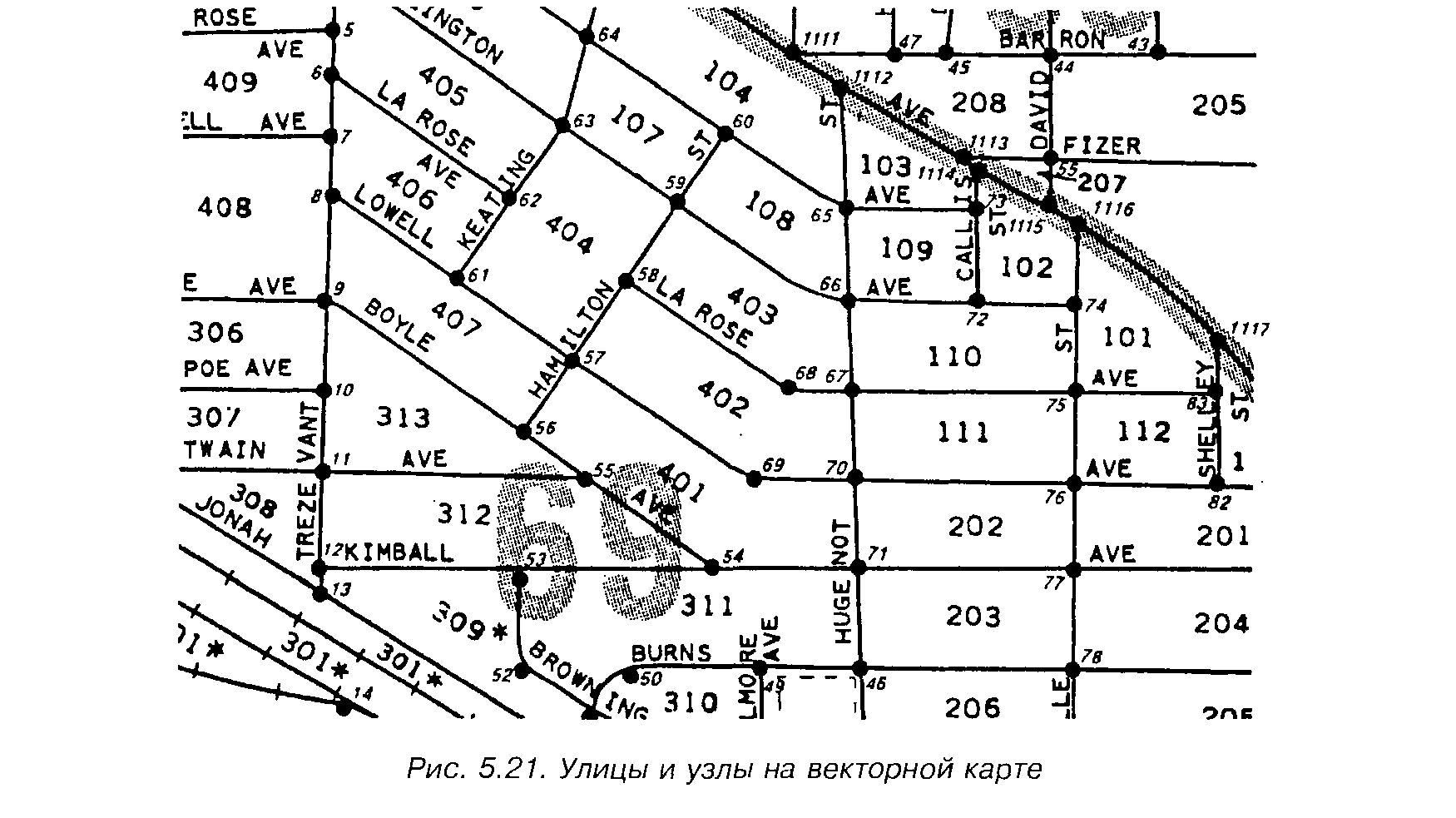
Рис. 5.21. Вулиці і вузли на векторної карті
Наявні карти чи зображення місцевості, отримані з літаків і супутників, скануються. Потім спеціальне програмне забезпечення трансформує зображення спочатку у матричний, потім у векторний формат. Електронна карта несе таку інформацію, як номери доріг, назви вулиць, номери будинків між перехрестями, одностороннє чи двостороннє рух надворі, назви готелів, ресторанів тощо. буд.
5.8.1. Орієнтування на карті місцевості по конфігурації пройденого шляху Цей метод дозволяє визначити чи уточнити поточні координати автомобіля порівнянням конфігурації пройденого шляху (його дільниці), отриманого навігаційним численням з конфігурацією дороги, через яку рухається автомобіль. На рис. 5.22 показано, як порівнюються і коригуються шляху, отримані навігаційним численням з розгорнутою картою. Спочатку навігаційна система визначає, які із сусідніх доріг можуть відповідати координатам автомобіля
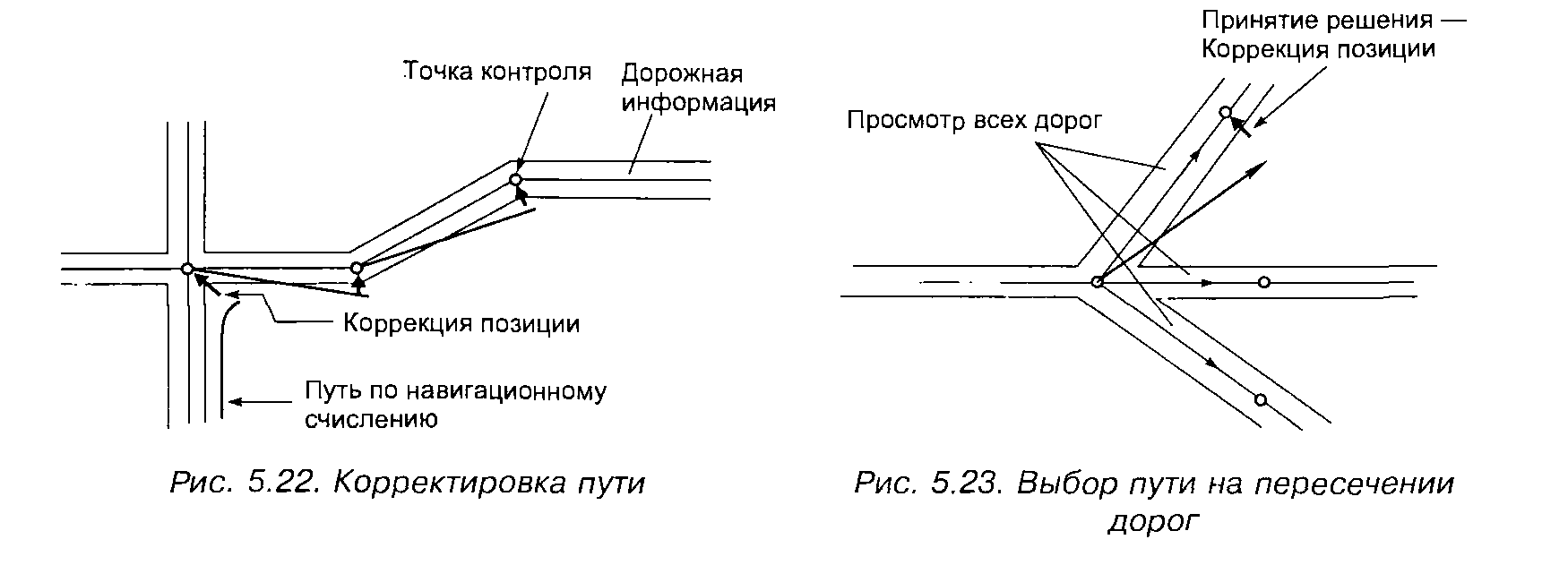
Рис. 5.22 Рис. 5.23
певним навігаційним численням.