

Глава 4. Перетворювачі в автомобільних системах управління
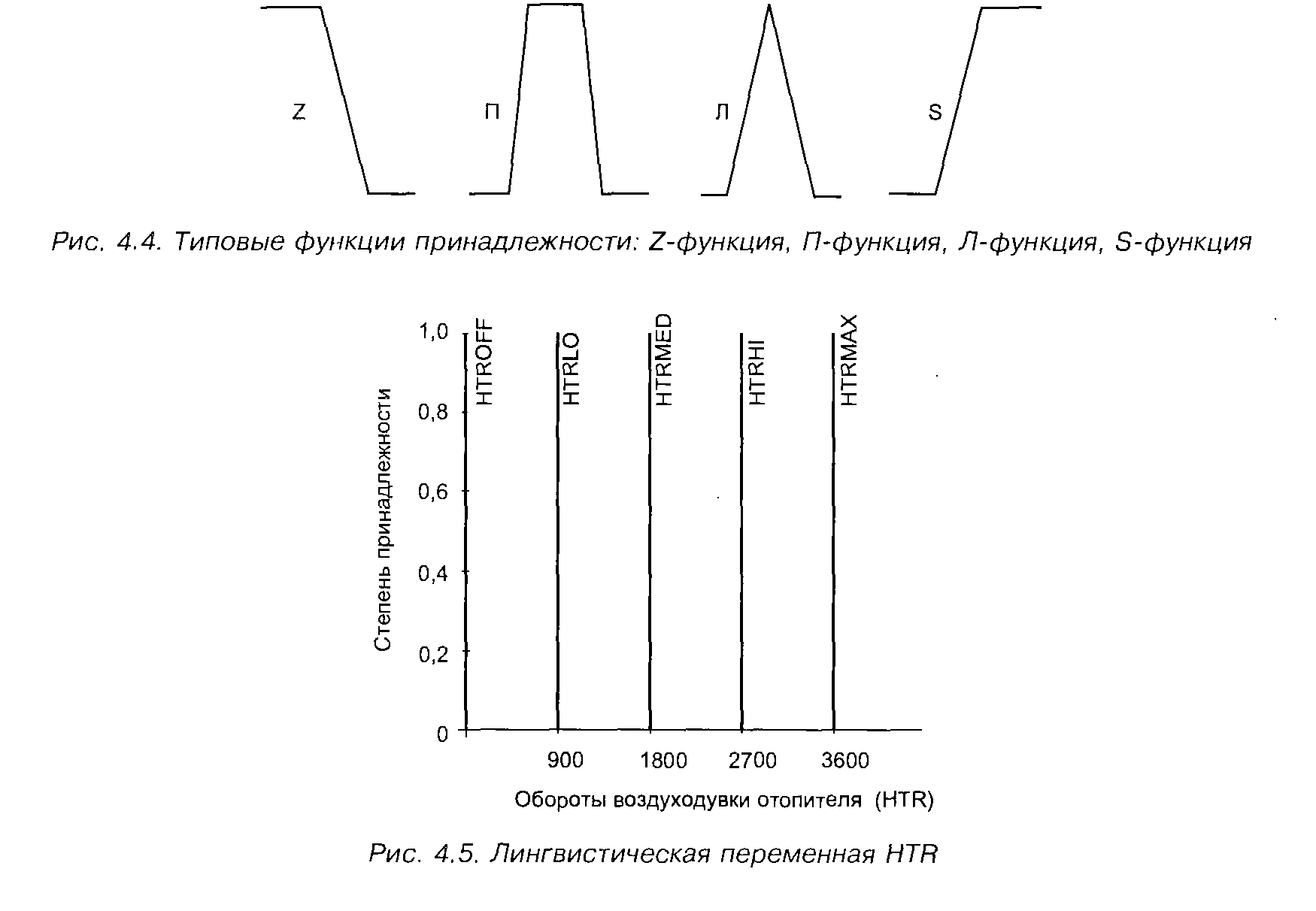
Рис. 4.5. Лінгвістична змінна HTR
означає стиснення даних, т. до. одним значенням лінгвістичної перемінної охоплюють весь діапазон значень базової перемінної. Вихідна лінгвістична змінна HTR (обертів вентилятора отопителя) реалізується у вигляді термов HTROFF (відключено), HTRLO (малі обертів), HTRMED (середні), HTRHI (високі), HTRMAX (максимальні). Для функцій приналежності вихідний величини може бути зображена тільки максимуми (рис. 4.5).
4.3. Продукционные правила
Задля реалізації управління задаються (визначаються) продукционные правила, котрі пов'язують вхідні і вихідні лінгвістичні перемінні. Сукупність таких правил описує стратегію управління, застосовується у цій завданню. Стратегія має бути зрозумілою розробникові на інтуїтивному рівні. Типове продукционное правило складається з антецедента (частина IF) і консеквента (частина THEN). Антецедент може містити більше посилки. І тут вони об'єднуються у вигляді логічних зв'язок OR чи AND. У нашому випадку:
IF (Tl = ICYCOLD) AND (US = НЗП) THEN HTR = HTRMAX
Це з продукционных правил, його зміст у цьому, що у салоні дуже холодно, а уставка перемикача на панелі клімат-контролю вагітною «жар
4.3. Продукционные правила
до», вентилятор отопителя повинен ные
правила — типові умовні гда їх зручно
ставити таблицею 30 продукционных правил.
працювати на повну потужність.
Продукпион-операторы стисло формі (без
ELSE).
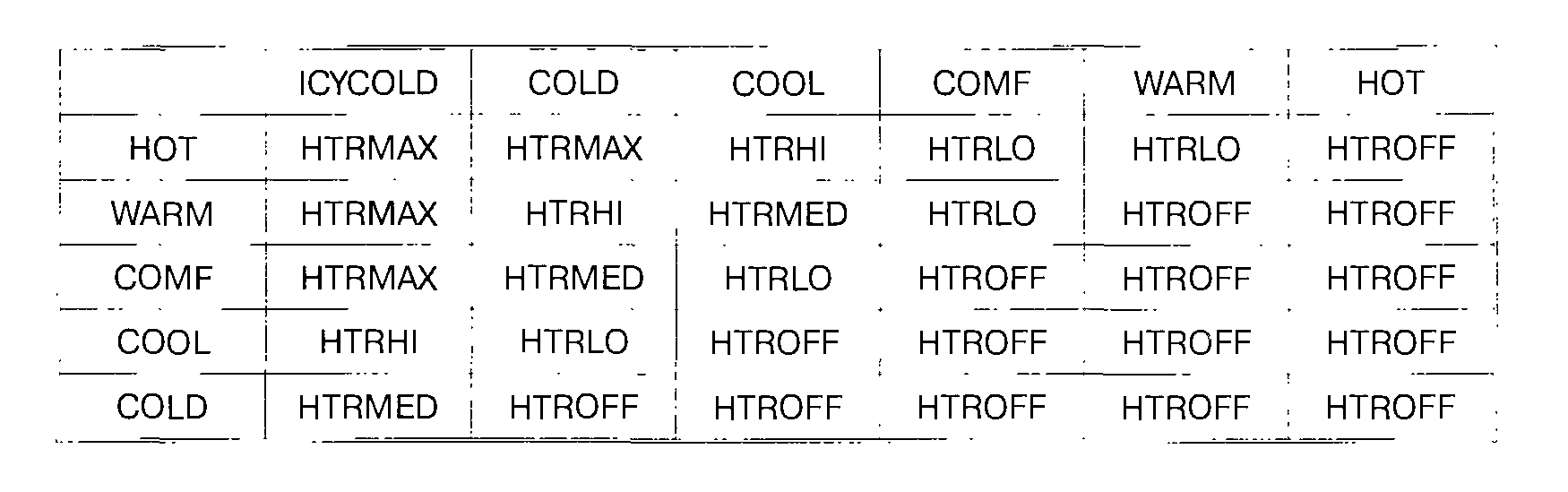 Рис.
4.6. Продукционные правила Припустимо,
що температура в салоні 18 °З, а уставка
на панелі управління клімат-контролю
26 °З. Ступінь приналежності 18 °З до терму
COOL перемінної TI становить 0,6, а до терму
COLD — 0,4 (рис. 4.2). Ступінь приналежності
26 "З до терму WARM перемінної US становить
0,5, а до терму COMF також 0,5 (.рис. 4.3). До
іншим термам приналежність кульова,
тому, відповідно до нечіткою логіці
виявляються задіяними такі продукционные
правила:
Рис.
4.6. Продукционные правила Припустимо,
що температура в салоні 18 °З, а уставка
на панелі управління клімат-контролю
26 °З. Ступінь приналежності 18 °З до терму
COOL перемінної TI становить 0,6, а до терму
COLD — 0,4 (рис. 4.2). Ступінь приналежності
26 "З до терму WARM перемінної US становить
0,5, а до терму COMF також 0,5 (.рис. 4.3). До
іншим термам приналежність кульова,
тому, відповідно до нечіткою логіці
виявляються задіяними такі продукционные
правила:
IF (TI = COOL) AND (US = WARM) THEN HTR = HTRMED
IF (TI = COOL) AND (US = COMF) THEN HTR = HTRLO
IF (TI = COLD) AND (US = WARM) THEN HTR = HTRHI
IF (TI = COLD) AND (US = COMF) THEN HTR = HTRMED
Тепер потрібно визначити ступеня приналежності антецедентов правил. І тому в нечіткою логіці існують два оператора: MIN(...) і МАХ(...). Перший обчислює мінімальне значення ступеня приналежності, а другий — максимальне значення. Коли застосовувати той чи інший оператор, залежить від того, який зв'язкою з'єднані посилки у правилі. Якщо використана зв'язка AND, застосовується оператор MIN(...). Якщо ж посилки об'єднані зв'язкою OR, необхідно застосувати оператор МАХ(...). У нашій прикладу застосуємо оператор MIN(...), оскільки використана зв'язка AND. Одержимо таке:
MIN(0,6, 0,5) = 0,5
MIN(0,6, 0,5) = 0.5
MIN(0,4, 0,5) = 0,4
MIN(0,4, 0,5) = 0,4
Обчислені значення стають числовими значеннями ступеня приналежності відповідних консеквентов. Наприклад, з першого продукционного правила слід, що ступінь приналежності необхідного числа оборотів вентилятора N до терму HTRMED (1800 обертів на хвилину) лінгвістичної перемінної HTR становить 0,5. Кажуть, отримано нечіткий висновок чи нечітке значення
Глава 4. Перетворювачі в автомобільних системах управління керуючої перемінної. Щоб виконавче пристрій змогло відпрацювати отриману команду, необхідний етап управління, у якому позбуваються нечіткості і що називається дефазификацией. Нині відсутня систематична процедура вибору стратегії дефазификации. Насправді в системах управління часто використовують центроидный метод [181. У дискретному разі для центроидного методу формула для обчислення чіткого значення вихідний перемінної має вигляд:

де z — чітке значення вихідний перемінної; zt — значення вихідний перемінної для /-го терма з одиничним значенням ступеня приналежності; цс(^/) — сте~ пень приналежність до цьому терму, п — число термов. У нашій прикладу відповідно до рис. 4.5:
![]()
Застосування нечіткою логіки управління Застосування нечіткою логіки призводить до своєрідному стиску оброблюваних даних, непотрібно створювати громіздкі багатовимірні калібровані таблиці, але обсяг обчислень зростає. Лінгвістичні функціональні перетворювачі з нечіткою логікою широко використовують у системах самонаведення багатьох автомобільних агрегатів, наприклад, в гідравлічних гальмах і системи ABS. Для ефективного гальмування система ABS обмежує тиск гальмівний рідини, запобігаючи блокування коліс, утримуючи коефіцієнт ковзання P.S в оптимальних межах 0,05...0,2 (рис. 4.7). Коефіцієнт ковзання

де Va — швидкість автомобіля, Vk — лінійна швидкість крапки над радіусі колеса. Системи ABS більшості виробників налаштовані компромісне значення P.S = 0,1. Але дорожні умови різні, й па обледенілій дорозі P.S має бути одно 0,05, але в сухому асфальті 0,2. Датчики поточного стану дорожнього покриття занадто дорогі. Перемикач, управляючий системою ABS, для водія встановлювати безглуздо. З іншого боку, досвідчений водій за реакцією автомобіля при натисканні педалі гальма здатний ідентифікувати стан покриття дороги. Це робить і ЭБУABS за інформацією наявних датчиків: швидкості і прискорення автомобіля, швидкості і прискорення коліс, тиску гальмівний рідини. Інформація обробляється по алгоритмам нечіткою логіки. Експерименти показали, робота системи ABS істотно поліпшується вже за часів запровадження шести продукционных правил [17].
4.4. Застосування нечіткою логіки управління
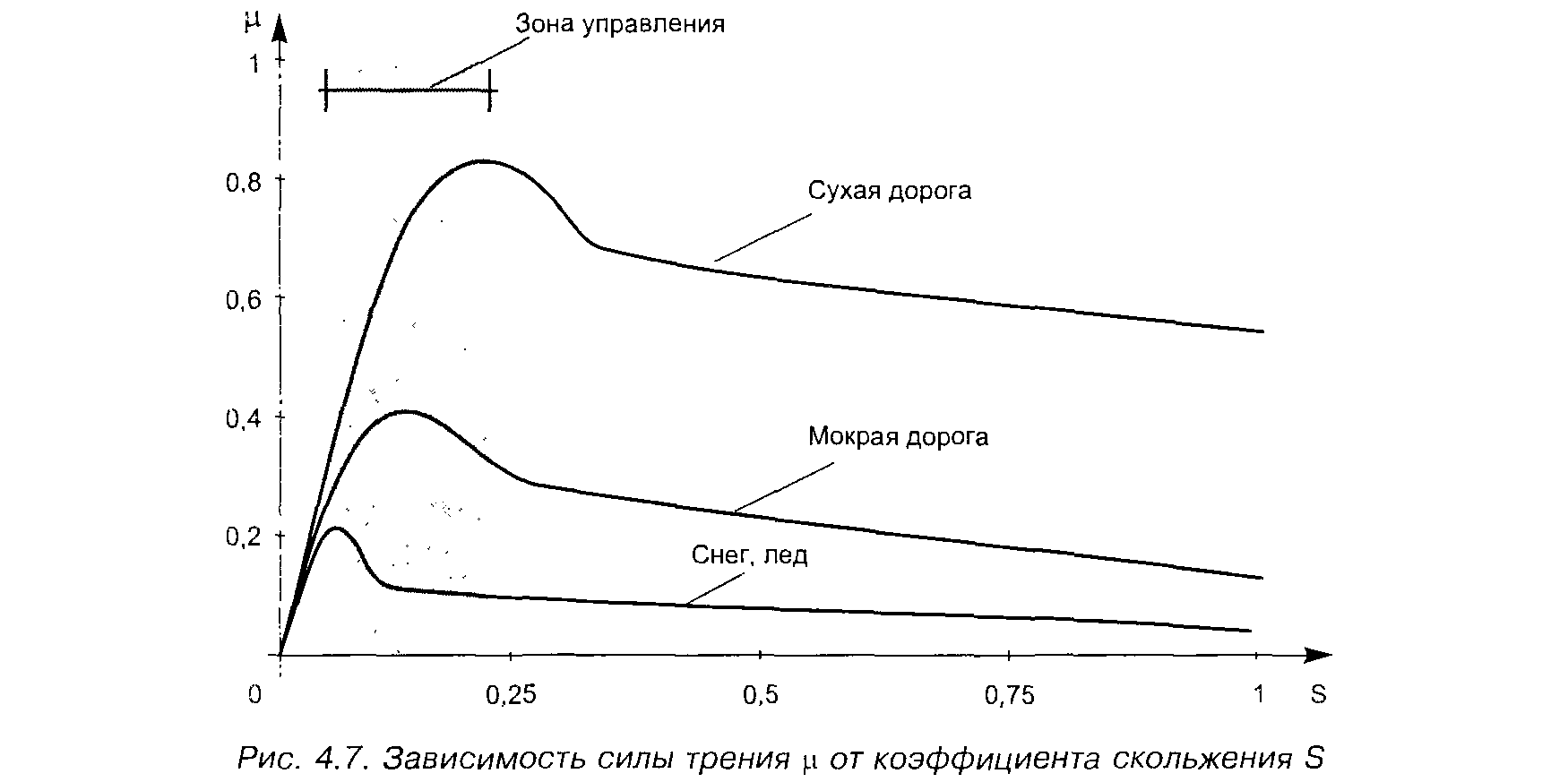 Рис.
4.7. Залежність сили тертя ц від коефіцієнта
ковзання S
Рис.
4.7. Залежність сили тертя ц від коефіцієнта
ковзання S
Алгоритми нечіткою логіки можна натрапити у програмне забезпечення електронних систем автомобіля визначення УОЗ, управління подачею палива, управління дросельної заслінкою в круїз-контролі, управління автоматичною коробкою передач, в зарядних пристроях інтелектуальних акумуляторів електромобілів.
Автомобіль — складний об'єкт керувати. Наприклад, систему управління динамічної стабільністю й додатковий курсовий сталістю руху з урахуванням нечіткою логіки використовує 200—600 продукционных правил. Але спрацьовування системи значно пришвидшується проти технічним рішенням з урахуванням калібрувальних діаграм [17|. Процес розробки системи управління з нечіткою логікою функціонування включає:
• визначення лінгвістичних неременных, нечітких правил, методу дефазификации;
• налагодження і аналіз програмної моделі;
• оптимізацію системи управління з урахуванням персональної ЕОМ із реальним об'єктом;
• генерацію коду для микроконтроллера реальної системи управління.
Ці етапи зазвичай виконуються з допомогою комп'ютеризованої системи CAD-fuzzy-TECH (наприклад, версії 5.5). У першому етапі з допомогою програмних продуктів, закладених luz/y-ТНСН, завдання формалізується. Тут слід описати використовувані лшпвистические перемінні, їх функції приналежності, описати стратегію управління у вигляді нечітких правил. Нижче наводяться вікна проекту з описом лінгвістичних змінних Т! (рис. 4.8), US (рис. 4.9) і HTR (рис. 4.10) для випадку з автомобільним оюпителем (див. рис. 4.5). На рис. 4.11 з допомогою табличного уявлення продукционных правил описана стратегія нечіткою логіки управління, відповідальна структурі проектиремой системи (рис. 4.12). У деяких завданнях замість табличній використовується матрична форма уявлення продукционных правил.
4.4. Застосування нечіткою
логіки управління". У таблиці (рис.
4.11) DoS — це ваговій коефіцієнт відповідного
правила, у разі DoS = 1. Програмний пакет
fuzzy-TECH дозволяє моделювати поведінка
проектованої системи. Змінюючи значення
вхідних змінних, можна спостерігати
відповідні значення вихідних (рис.
4.13). Рис. 4.12
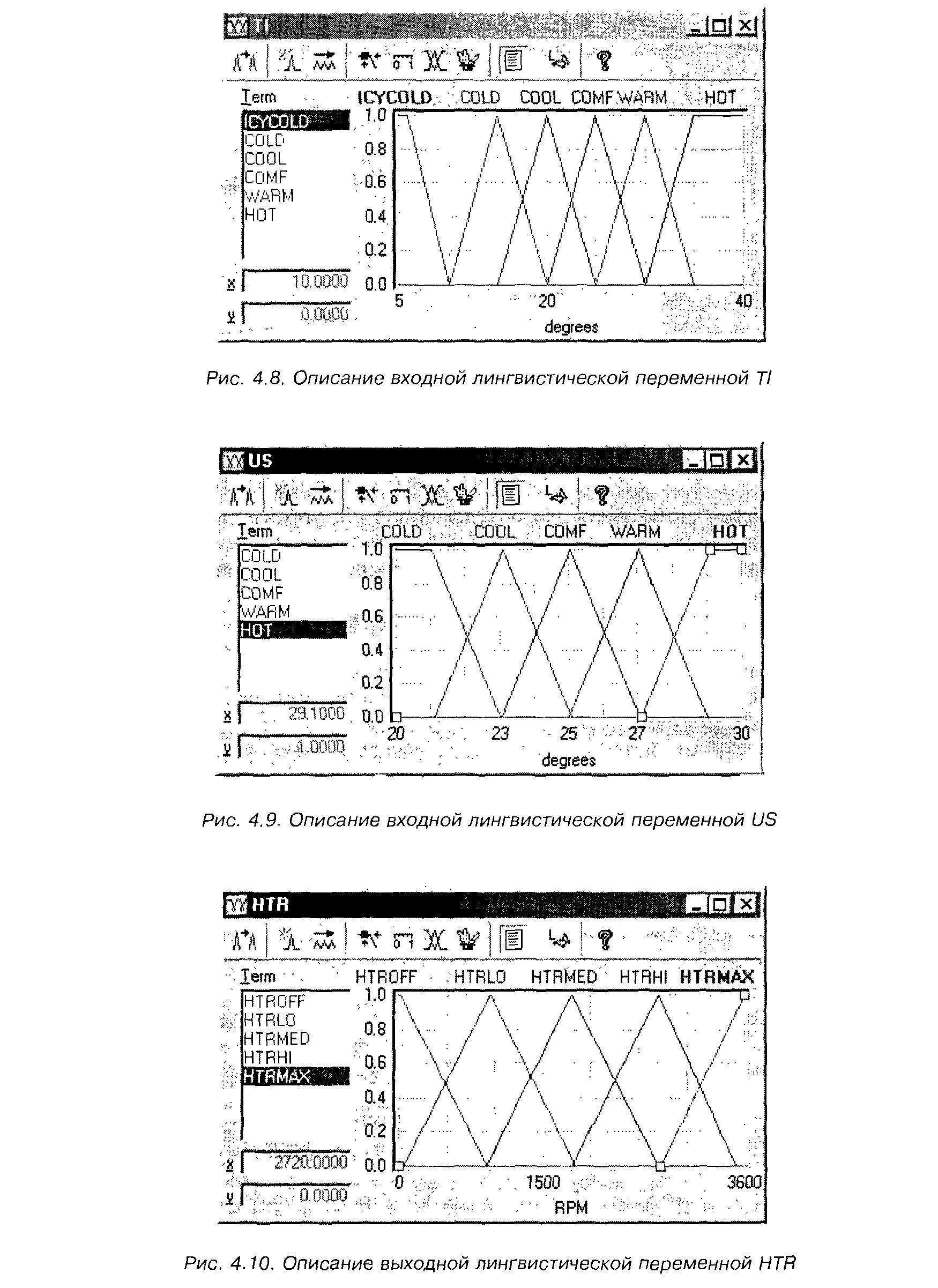
Рис. 4.8 Описання основно лінгвістичної перемінної TI
Рис. 4.9. Описання основно лінгвістичної перемінної US
Рис. 4.10.Описання основно лінгвістичної перемінної HTR
Рис. 4.12. Структура проектованої системи з вікна проекту Пакет fuzzy-TECH допускає з'єднання фізичної лінією зв'язку комп'ютера з розроблюваної системою управління і реального об'єкта управління у єдиний отладочный комплекс. Такий вид налагодження дозволяє спостерігати поведінка системи за умов й за необхідності вносити зміни до проекту.
Глава 4. Перетворювачі в автомобільних системах управління Рис. 4.13. Вікно налагодження (чи вікно лінгвістичної перемінної TI як налагодження (б) На останньому етапі отримати остаточного варіанта програмного коду конкретної микроконтроллера і, коли потрібно, зв'язати його провідною програмою ЭСАУ.

Рис. 4.10. Тблищне завдання продукційних правел
Рис. 4.12. Структура проектованої системи з вікна проекту
Основу програмного коду, генерованого пакетом fuzzy-TECH, становить програмне ядро, аппаратно-ориентированное на конкретний тип процесора. Поставлене з пакетом fuzzy-TECH MCU-96 програмне ядро сумісно з цими типами контролерів, як 8051..., 8025!... тощо. буд. [5].

Рис. 4.13.