

2.3.3 Радиолокаторы бокового и кругового обзора
Радиолокаторы космического базирования работают в микроволновом диапазоне, обычно на длинах волн короче 30 см. Как и в оптическом диапазоне, используются окна прозрачности атмосферы. Например, работа не ведется вблизи линий поглощения кислорода (1,35 см) и водяного пара (5 мм). Принцип импульсной радиолокации в общих чертах состоит в следующем. На спутнике устанавливается передатчик, посылающий с помощью антенны в направлении Земли импульсы с высокочастотным заполнением (рис. 3.3). После этого наступает пауза, в течение которой производится прием отраженных сигналов. Если импульс отражается от некоторого объекта, расположенного на расстоянии L от спутника, то он вернется назад через интервал времени Δt = 2L/c, где с − скорость света, множитель 2 учитывает, что сигнал проходит путь L дважды. Чем дальше объект от радиолокатора, тем больше Δt.
Сигналы от различных объектов приходят в разное время, это автоматически реализует сканирование по дальности. Измеряя Δt, можно найти расстояние до объекта. Интенсивность отраженных сигналов зависит от дальности и различна для разных объектов, так как они отличаются размерами и электрофизическими характеристиками.
Для достижения высокого пространственного разрешения вдоль строки необходимо использовать очень короткие импульсы, поскольку электромагнитная волна распространяется со скоростью света, проходя 300 м за 1 мксек. Укорочение импульса приводит к уменьшению его энергии и не всегда приемлемо, поэтому высокочастотное заполнение сравнительно длинного импульса (длительностью в несколько мксек) модулируют в передатчике специальным образом, а в приемнике применяют процедуру сжатия (укорочения) отраженного сигнала. Для современной техники разрешение в 1−10 м не является пределом. Радиолокатор перемещается вместе со спутником, последовательно считывая по строкам сигнал с интенсивностью, пропорциональной отражательной способности различных участков поверхности. Строки, как и в сканерах оптического диапазона, расположены поперек движения спутника.
Отсюда следует, что антенна такой радиолокационной станции, собирающая отраженные сигналы, должна быть направлена именно в этом, боковом направлении, поэтому такого рода устройства называют радиолокационными станциями бокового обзора (РЛС БО). РЛС БО может содержать две антенны − одна смотрит вправо, другая – влево, участок под спутником не просматривается.
Принцип действия локаторов кругового обзора аналогичен, но такие локаторы применяются только в стационарных РЛС или подвижных, если скорость носителя невелика.
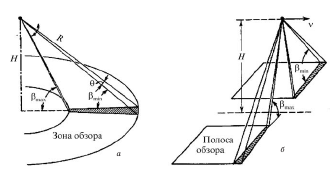
Рисунок – Схема кругового (а) и бокового (б) способов обзора поверхности
Пространственная разрешающая способность РЛС БО в направлении движения спутника (разрешение между строками) зависит от направленных свойств приемной антенны. Антенна выполняет те же функции, что и оптическая система, суммируя в пределах апертуры энергию, приходящую от некоторого участка местности на поверхности. И в этом случае справедливы приведенные выражения для углового и пространственного разрешения. Но длина волны в радиодиапазоне на несколько порядков больше, чем длина волны оптического диапазона. Например, спутник ERS, летящий на высоте Н = 780 км, принимает радиолокационные сигналы, отраженные от земной поверхности, на длине волны λ = 5,3 см при дальности L = 900 км. Следовательно, диаметр приемной параболической антенны чтобы получить предельное разрешение ΔL = 30 м, должен быть равен 2R = 2λ·L/ΔL = 2 км, что нереально. Все же найден способ обойти это ограничение путем использования радиолокаторов с синтезированной апертурой (РСА, английское сокращение SAR).
Идея РСА, в принципе, достаточно проста. В РСА используется движение самого спутника и установленной на нем антенны с реальной апертурой (скорость более 7 км/с). Сигналы, принятые антенной, запоминаются и далее суммируются (накапливаются) компьютером, так что сигнал от объекта М, принятый в точке Р в момент времени ti, складывается с сигналом от этого же объекта, который ранее принимался в момент tm, когда спутник находился в точке Р'.

Рисунок – Принцип синтеза апертуры
Для объектов, находящихся ближе к спутнику, используют меньший размер синтезированной апертуры, для дальних объектов размер апертуры растет пропорционально росту расстояния L. Это позволяет уменьшить мгновенное поле зрения Δϕ для дальних объектов и сделать разрешение независимым от дальности, что обычно недостижимо в оптическом диапазоне. Если λ = 5,3 см, то для получения пространственного разрешения в 30 м на дальности L = 1000 км размер синтезированной апертуры должен составлять 1,77 км, на дальности L = 1 200 км – 2,12 км.
На практике применяются как РЛС БО с реальной апертурой (их называют также некогерентными РЛС БО), так и РСА, так называемые когерентные РЛС БО. Преимуществом некогерентных РЛС БО являются более широкая полоса обзора и относительная простота как самого радиолокатора, так и системы обработки информации. Радиолокационные системы с синтезированной апертурой позволяют получать наиболее высокое разрешение, но требуют сложной системы обработки на борту. В целом же пространственное разрешение РЛС БО (1−100 м для РСА и 1−2 км для некогерентных РЛС БО) сравнимо с разрешением оптических систем.
Когерентные волны - волны, характеризующиеся одинаковой частотой и постоянством разности фаз в заданной точке пространства.