

ВСТУП
Програмою предмета “Автоматизація теплових процесів” передбачається вивчення основ теорії автоматичного регулювання, принцип дії і конструкції засобів автоматизації та їх примінення для автоматизації теплових процесів.
Програма базується на вивченні фундаментальних та професійно-орієнтовних дисциплін: “Теплотехнічні вимірювання” і “Теплотехнічне обладнання”, та являється базою для вивчення предмету “Газообладнання і автоматизація котлів”. Програма охоплює вивчення чотирьох розділів, які освітлюють перспективи розвитку автоматизації теплових процесів, ставлять задачі та пояснюють принципи автоматичного регулювання, дають можливість визначити якість процесу регулювання, вибрати тип регулятора та виконавчого механізму.
Матеріал третього і четвертого розділів програми навчальної дисципліни дає змогу студентам опанувати основними типами схем автоматизації обладнання теплотехнічних установок та автоматизованими системами керування енергетичним господарством підприємства.
Для покращення засвоєння матеріалу програмою передбачається проведення практично-лабораторних робіт та відводиться час на самостійну роботу студентів, що спонукає до поглибленого вивчення матеріалу, прививає любов і повагу до вибраної спеціальності. Зміст предмету забезпечує одержання знань студентами кваліфікації молодшого спеціаліста теплотехніка.
Автоматизація виробничих процесів створює певні техніко-економічні переваги у всіх галузях сучасного господарства України.
В першу чергу змінюється характер і умови праці на виробництві. Скорочуються до мінімуму трудові затрати, понижується психологічне навантаження працівника, на його долю залишаються лише функції по перенастроювані автоматичних систем на нові режими та участь в ремонтно-налагоджувальних роботах. Зменшується число обслуговуючого персоналу і затрати на його утримання.
Важливе питання автоматизації - встановлення її раціонального рівня та об’єму, який повинен бути економічно обґрунтований, і визначення методів та засобів автоматизації.
Впровадження автоматизації приносить значний економічний ефект за рахунок заощадження енергетичних ресурсів, збільшення виробничих потужностей, підвищення якості продукції.
Головним елементом в структурі систем теплопостачання являється споживач, на задоволення потреб якого і направлене функціонування систем теплозабезпечення.
Основними напрямками автоматизації систем теплопостачання є забезпечення: теплового та санітарно-гігієнічного комфорту споживача; підтримання заданих гідравлічних режимів у різних ділянках системи, які включають захист від аварійних ситуацій; економію палива, тепла і електричної енергії; ефективності, надійності та якості роботи основного обладнання системи.
Системи теплопостачання являються найбільшими споживачами палива в народному господарстві України. Кожного року на теплопостачання витрачаються тисячі тон палива. У зв’язку з цим здійснюються міроприємства, які дозволять економити енергоносії. В основу цих міроприємств входять питання оптимізації процесу спалювання палива, покрашення ізоляції теплотрас, своєчасне подання інформації про вихід з ладу ділянок теплотрас, мінімізація втрат тепла на теплообмінних станціях, зменшення перегріву приміщень, які опалюються. Всі вище перераховані питання можливо впровадити при використанні сучасних систем автоматичного регулювання, вимірювання та захисту.
Важливою особливістю систем теплопостачання являється велика їх довжина, що потребує використання систем телемеханіки та диспетчеризації. Сучасний рівень диспетчеризації неможливо уявити без широкого застосування мережі потужної обчислювальної техніки, у яку надходила б не тільки оперативна інформація, але й інформація про хід процесу за певний проміжок часу.
Необізнаність з можливостями автоматизації інженера-теплотехніка, як замовника системи, в більшості випадків є причиною складання некоректного або нераціонального завдання на розробку систем автоматизації.
В таких випадках навіть висококваліфікованими розробниками систем автоматизації створюються недосконалі, неоптимальні, а часом і морально застарілі системи автоматизації. При значних матеріальних і фінансових затратах замовник не отримує належного економічного ефекту.
Створення оптимальної системи автоматизації відбувається тільки при тісній взаємодії та взаємопорозумінні замовника та розробника і передбачає не пряме впровадження методів та засобів автоматики в той чи інший процес та механізм, а їх тонке переплітання, в окремих випадках зі заміною традиційних технологій та пошуком нових методів та засобів автоматизації.
З метою регулювання й керування станами об'єктів розроблялися різні регулятори. В 1765 році И. И. Ползуновым уперше був винайдений регулятор рівня води (мал. 1.1), потім в 1784 році шотландський інженер Дж. Уатт (James Watt, 1736-1819) створив відцентровий регулятор швидкості обертання (мал. 1.2).
Рис. 1.1 Принципова схема регулятора рівня води: 1- об'єкт керування; 2- поплавець- вимірювальний елемент; 3- голка- виконавчий елемент.
П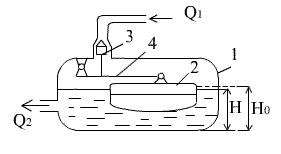 ринцип
дії регулятора рівня наступний:
регульованим (контрольованим) параметром
є рівень рідини H0 у резервуарі. Регулюючим
впливом є потік рідини Q1, що протікає
по трубі й через прохідний перетин у
голчастому клапані 3 надходить у бак.
впливом, Що Обурює, є витрата рідини Q2
вытекающий з бака. У регуляторі є
поплавець 2, з'єднаний з важелем 4. У цьому
важелі 4 зв'язана голка 3. При зміни
значення витрати рідини (навантаження),
тобто при порушенні балансу між Q1 і Q2,
спостерігається відхилення рівня рідини
в баці від сталого його значення.
Міняється положення поплавця 2, змінюється
прохідний перетин під голкою 3 і відповідно
із цим змінюється надходження рідини
так, що знову відновлюється вихідний
рівень. Якщо зміна рівня викликається
зміною навантаження, то відновлення
буде неповним. Зі збільшенням навантаження
Q2, для підтримки заданого рівня H0 прохідне
перетину під голкою 3 переводиться в
нове положення. При цьому важіль 4 і
поплавець 2 теж займають нове положення.
Це положення відрізняється від вихідного,
тобто з'являється погрішність регулювання
DH=H0-H, що називається статичною погрішністю
регулювання.
ринцип
дії регулятора рівня наступний:
регульованим (контрольованим) параметром
є рівень рідини H0 у резервуарі. Регулюючим
впливом є потік рідини Q1, що протікає
по трубі й через прохідний перетин у
голчастому клапані 3 надходить у бак.
впливом, Що Обурює, є витрата рідини Q2
вытекающий з бака. У регуляторі є
поплавець 2, з'єднаний з важелем 4. У цьому
важелі 4 зв'язана голка 3. При зміни
значення витрати рідини (навантаження),
тобто при порушенні балансу між Q1 і Q2,
спостерігається відхилення рівня рідини
в баці від сталого його значення.
Міняється положення поплавця 2, змінюється
прохідний перетин під голкою 3 і відповідно
із цим змінюється надходження рідини
так, що знову відновлюється вихідний
рівень. Якщо зміна рівня викликається
зміною навантаження, то відновлення
буде неповним. Зі збільшенням навантаження
Q2, для підтримки заданого рівня H0 прохідне
перетину під голкою 3 переводиться в
нове положення. При цьому важіль 4 і
поплавець 2 теж займають нове положення.
Це положення відрізняється від вихідного,
тобто з'являється погрішність регулювання
DH=H0-H, що називається статичною погрішністю
регулювання.

Рис. 1.2 Схема відцентрового регулятора швидкості обертання:
1-голк-виконавчий елемент; 2-вантаж-вимірювальної елемент; 3-пружина - чутливий орган; 4 - муфта.
Принцип дії відцентрового регулятора наступний. При збільшенні швидкості обертання механізму швидкість обертання вала починає рости. Під дією зрослої відцентрової сили розходяться вантажі 2, переборюючи силу пружини 3 чутливі елементи регулятора, муфта 4 регулятори піднімається до верху й голка 1 опускається вниз. Зменшиться подача палива у двигун і зменшується швидкість обертання вала двигуна. Таким чином, регулятор протидіє зміні регульованої величини - швидкості обертання й прагне стабілізувати її значення.
Ці регулятори дотепер застосовуються в промисловості. Регулятори рівня застосовуються зараз в автомобільних карбюраторах. Відцентрові регулятори швидкості обертання є в автомобільних дизельних двигунах, парових турбінах, двигунах реактивних літаків. Вони призначені для стабілізації режиму роботи.
РОЗДІЛ 1
1.1.Основні поняття та визначення тар.
План.
1.Основні визначення.
2.Закони регулювання.
3.Схеми будови САР.
Автоматизація теплоенергетичних процесів - це означає вимір і контроль теплових процесів, перетворення неелектричних параметрів в електричні, реєстрація технологічних параметрів, передача інформації, ухвалення рішення й керування станом об'єктів.
Основними параметрами теплоенергетичних процесів є температура, тиск, рівень, маса, обсяг, витрата, якість, состав і інші електричні й неелектричні величини рідини, пари й повітря.
Для контролю величин цих параметрів необхідно вести виміру безупинно. Результати вимірів рівняються з необхідними значеннями контрольованого параметра, а якщо є відхилення, то подається сигнал про відхилення. Відхилення можуть бути позитивні або негативними, зменшення або підвищення й так далі. По відхиленнях приймається рішення й сигнал подається на об'єкт керування. У процесі ухвалення рішення можуть брати участь людина-оператор або пристрій.
Під керуванням розуміють таку організацію процесу, що забезпечує заданий характер протікання процесу.
При цьому сам процес (сукупність технічних засобів - машин, знарядь праці, тобто виконавців конкретного процесу) - з погляду керування, є об'єктом керування (ОУ), а змінні, що характеризують стан процесу, називаються керованими змінними або керованими величинами.
Автоматичне керування (регулювання) це здійснення якого-небудь процесу без особистої участі людини, за допомогою відповідних систем автоматики. Якщо автоматичне керування покликане забезпечити зміну (підтримка) керованої величини за заданим законом, то таке автоматичне керування називають автоматичним регулюванням.
Технічні пристрої, що виконують операції керування (регулювання) - називаються автоматичними пристроями.
Сукупність засобів керування об'єктів утворить систему керування.
Систему, у якій всі робітники й керуючої операції виконують автоматичні пристрої, називають автоматичною системою.
Збудженням називаються такі зміни нерегульованої величини, які викликають зміну регульованої величини.
Впливи, що прикладають до регулятора для забезпечення необхідних значень керованих величин, є керуючими впливами. Керуючі впливи називають також вхідними величинами, а керовані - вихідними величинами. Таким чином, усякий технічний процес характеризується сукупністю фізичних величин, називаних показниками або параметрами процесу.
Безпосередній зв'язок між «виходом» та «входом» називається зворотнім зв'язком.
Залежно від характеру зв'язків системи регулювання діляться на системи працюючі по:
1) замкнутому циклу (Рис. 1.3)

Рис. 1.3 Схема замкнутого регулювання
Р-Р- регулятор, ОР- об'єкт регулювання, ГОС - головний зворотний зв'язок,
![]() -
керуючий вплив,
-
керуючий вплив,
![]() - вплив, що обурює
- вплив, що обурює![]() ,
- регульований параметр
,
- регульований параметр![]() ,
- вхідна величина відхилення регульованого
параметра.
,
- вхідна величина відхилення регульованого
параметра.
2) розімкнутому циклу (Рис. 1.4.)

Рис. 1.4.Схема розімкнутого регулювання.
Наявність зворотного зв'язку між ОР і регулятором, що називають головною, є необхідною умовою автоматичної системи регулювання (АСР), тобто АСР це замкнуті динамічні системи спрямованої дії.
У теплоенергетиці знаходять застосування системи регулювання декількох величин. При цьому їхні регулятори зв'язані поза ОР. Такі схеми називаються системами зв'язаного регулювання, наприклад, АСР теплофікаційних турбін.
Системи регулювання, де керуючий вплив змінюється залежно від часу за заданим законом, звуться систем програмного регулювання.
Законом регулювання називається залежність між відхиленням регулюючого параметру від заданого значення і положенням регулюючого органу.
-По характеру керуючого впливу системи підрозділяються на:
системи автоматичної стабілізації (САС);
системи програмного керування (СПУ);
системи, що стежать (СС).
У САС керуюче (вхідне) вплив не змінюється в часі. Така система відпрацьовує виникаючі відхилення регульованої величини від заданого. Саме таке регулювання забезпечується в САР.
У СПУ керуюче (вхідне) вплив змінюється в часі за заданим законом. Такі системи застосовуються для керування процесами, характер протікання яких відомий.
У СС характер зміни керуючого впливу обумовлений процесами, що відбуваються поза системою, не може бути визначений. системи, що стежать, використаються для відпрацьовування збурювань, характер яких невідомий заздалегідь.
- По характері зв'язку між вхідною й вихідною величинами САУ підрозділяється на безперервні й переривчасті (дискретні, імпульсні й релейні).
У безперервних САУ між вихідними й вхідними величинами існує безперервна функціональна залежність.
У переривчастих САУ непреривній зміні регульованого параметра відповідає вихідна величина у вигляді:
послідовності імпульсів, амплітуди, тривалості й частоти повторень, які залежать від значення вхідної величини й характеру імпульсного елемента;
стрибкоподібного сигналу, що з'являється лише при певних значеннях вхідної величини.
- По величині помилки в сталому стані САУ підрозділяються на статичні й астатичні.
У статичних САУ в сталих режимах має місце відхилення регульованої величини від заданого значення.
Астатичними називають САУ, що забезпечують регулювання без статичної помилки.
- По призначенню системи:
Системи з пошуком экстремума показника якості;
Системи оптимального керування;
Адаптивні системи;
- По залежності часу стану об'єкта:
Статичні (статика, безінерційні);
Динамічні (інерційні).
- По зміні величини параметра за часом:
Стаціонарні;
Нестаціонарні.
- По джерелу енергії:
Електричні;
Пневматичні;
Гідравлічні й т.д.
- По способі впливу вимірювального елемента на регулюючий елемент:
САУ прямої дії;
САУ непрямої дії.
- По виду регульованого параметра:
САР температур;
САР тиску;
САР рівня вологості й т.д.
Крім того, можливі й інші ознаки класифікації, крім перерахованих.
П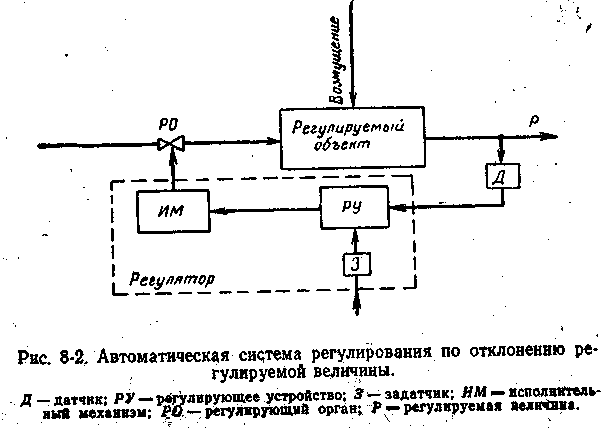 обудова
систем автоматичного регулювання
ґрунтується на застосуванні або
комбінуванні
двох основних принципів регулювання.
обудова
систем автоматичного регулювання
ґрунтується на застосуванні або
комбінуванні
двох основних принципів регулювання.
Найбільш широке поширення одержав принцип автоматичного регулювання по відхиленню регульованої величини від заданого значення (схема Повзунова-Уатта)
. Регульований об'єкт має вхід (приплив речовини, енергії) і вихід (стік речовини,
енергії).
Регульована величина Р впливає на чутливий елемент первинного вимірювального перетворювача (датчика) Д, перетвориться, надходить на вхід регулюючого пристрою РУ, у якому рівняється із Заданим значенням, вироблюваним пристроєм, що задає (задатчиком) 3, Якщо регульована величина дорівнює заданому значенню, то система автоматичного регулювання перебуває в стані рівноваги (сталому стані). При відхиленні регульованої величини від заданого значення рівновага порушується, регулятор приходить у дію й виникає процес регулювання (перехідний процес). На виході виконавчого механізму ИМ регулятора виробляється регулюючий вплив, що дає через регулювальний орган РО на вхід об'єкта. Регулюючий вплив спрямований на зменшення неузгодженості між дійсним і заданим значеннями регульованої величини.
Регулятор буде впливати на об'єкт до тих пір, поки регульована величина не зрівняється із заданим значенням.
Достоїнством таких систем є те, що регульована величина безупинно перебуває під контролем регулятора. У той же час принцип регулювання по відхиленню має істотний недолік, що складається в тім, що регулятор вступає в дію лише після появи неузгодженості між заданим і дійсним значеннями регульованої величини, що утрудняє забезпечення високої якості перехідного процесу. Такі системи в певних умовах здатні до самозбудження, .Що приводить до виникнення коливань регульованої величини.
З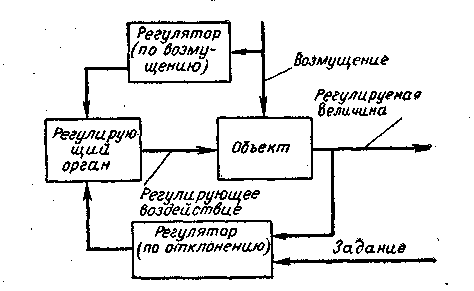 азначених
недоліків
позбавлені системи автоматичного
регулювання, побудовані
на принципі компенсації збурювань
(схема Понселя-Чиколаєва).
У таких системах регулятор одержує
інформацію про діючим
на об'єкт збурюваннях
і через регулюючий вплив компенсує
їхній вплив на об'єкт. Системи з
компенсацією збурювань
дозволяють досягти більше
високої якості регулювання, чим
системи, засновані
на принципі регулювання по відхиленню,
оскільки регулятор вступає в дію
ще до відхилення
регульованої величини.
Такі системи називаються розімкнутими,
тому що регулятор не контролює значення
регульованої величини
. Недолік
цих систем полягає в тому, що регульована
величина
може значно відхилитися від заданого
значення. Крім того, у реальних системах
практично неможливо забезпечити вимір
і компенсацію всіх
діючих
на об'єкт збурювань
азначених
недоліків
позбавлені системи автоматичного
регулювання, побудовані
на принципі компенсації збурювань
(схема Понселя-Чиколаєва).
У таких системах регулятор одержує
інформацію про діючим
на об'єкт збурюваннях
і через регулюючий вплив компенсує
їхній вплив на об'єкт. Системи з
компенсацією збурювань
дозволяють досягти більше
високої якості регулювання, чим
системи, засновані
на принципі регулювання по відхиленню,
оскільки регулятор вступає в дію
ще до відхилення
регульованої величини.
Такі системи називаються розімкнутими,
тому що регулятор не контролює значення
регульованої величини
. Недолік
цих систем полягає в тому, що регульована
величина
може значно відхилитися від заданого
значення. Крім того, у реальних системах
практично неможливо забезпечити вимір
і компенсацію всіх
діючих
на об'єкт збурювань
Найбільш зробленими є комбіновані автоматичні системи регулювання, що використають одночасно принципи по відхиленню регульованої величини та компенсації збурювань. При цьому зберігаються переваги обох принципів регулювання й зменшуються їхні недоліки.