

3 Приводи промислових роботів
3.1 Загальні відомості про приводи пр.
Привод – це пристрій, що служить для перетворення енергії в рух. Привод ще називають виконавчим пристроєм.
Приводи ПР в значній мірі визначають динамічні характеристики маніпуляторів: прискорення, швидкість руху робочого органу, точність позиціонування і т. д. Від типу і конструкції приводу також залежать експлуатаційні показники, габаритні розміри, споживання енергії, рівень шумів, можливість експлуатації роботів в різних середовищах. Існує ряд показників, по яких можна класифікувати приводи ПР.
По виду використовуваної енергії приводи можна розділити на пневматичні, гідравлічні, електромеханічні і комбіновані.
При виборі типу приводу необхідно враховувати:
- характер навантаження на робочий орган маніпулятора і його проміжні ланки;
- кінематичні характеристики маніпулятора;
- число точок і точність позиціонування;
-умови експлуатації робота, характеристики навколишнього середовища.
Певних обмежень для використання того або іншого типу приводу не існує. І все ж, пневматичні приводи доцільніше використовувати для простих роботів з цикловим управлінням і невеликою вантажопідйомністю (до 10 кг). Для роботів середньої і великої вантажопідйомності найчастіше використовують гідропривід. Останніми роками все частіше застосовуються електромеханічні приводи.
3.2 Пневматичний привод.
Понад чверть ПР, що випускаються в світі, забезпечені пневматичним приводом. Пневматичні приводи застосовують тільки для роботів невеликої вантажопідйомності – до 10 кг (надлегкі і легкі).
Основні переваги пневматичних приводів:
- простота і надійність конструкції;
- висока швидкість вихідної ланки (до 1 м/с при лінійному переміщенні, до 60 об/хв. при обертанні);
- екологічна чистота приводу (за рахунок використання стислого повітря);
можливість використання повітря із заводської пневмосистемы з тиском 0,5.0,6 Мпа;
- висока точність позиціонування при роботі по жорстких упорах;
- можливість застосування в агресивних і пожароопасних середовищах;
- відносно високий ККД (до 80 %);
- простота компоновки елементів;
- низька вартість конструкції і низькі витрати на обслуговування.
Недоліки пневматичного приводу:
- нестабільність швидкості вихідної ланки при зміні навантаження (унаслідок стисливості повітря);
- необхідність демпфування руху вихідної ланки приводу в кінці ходу;
- наявність шуму при роботі.
По функціональному призначенню пневмопристрої в приводі діляться на виконавчі, розподільні, управляючі.
Виконавчі пристрої призначені для перетворення енергії стислого повітря в енергію руху робочих органів ПР. Розподільні пристрої – для зміни потоків стислого повітря в лініях. Управляючі пристрої, забезпечують задану послідовність переміщень виконавчих пристроїв відповідно до необхідного закону руху робочих органів машини. З цією метою вони передають відповідні команди на розподільні пристрої.
За типом виконавчих пристроїв розрізняють приводи зворотно-поступального і обертального рухів.
В перших виконавчим пристроєм є пневмоцилиндр на два положення
(рис 3.1) або мембранна камера (рис.3.2).
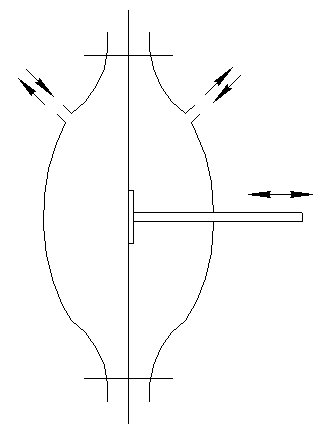
Рис. 3.1 Пневмоциліндр Рис.3.2 Мембранна камера
Мембранна камера являє собою круглу мембранну, края якої закріплені між металевими тарілками. До центра мембранни закріплений шток, який через сальник виходить зовні. Кінець штока з’єднаний з ланкою робота. При подачі стиснутого повітря між мембранною і одною з тарілок мембранна вигинається і переміщує штоком ланку маніпулятора.
В приводах обертального руху виконавчими пристроями є поворотний пневмодвигун (рис 3.3) або роторний лопастний пневмодвигун (рис 3.4).
Рис. 3.3 Поворотний пневмодвигун Рис. 3.4 Лопастний пневмодвигун
Розподільники в пневмоприводах – це звичайні золотники, клапана, вентилі і т. д. Так, для подачі повітря в порожнину пневмоциліндра чи мембранної камери використовують електропневматичні клапани. Схема такого клапана представлена на рис.3.5.
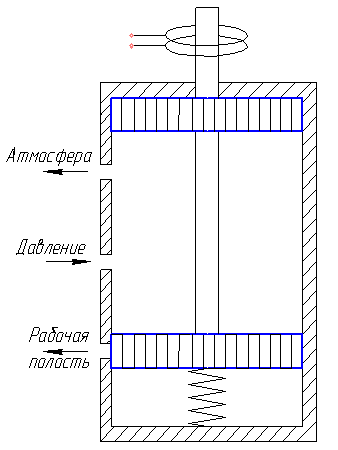
Рис.3.5 Електропневматичний клапан
Нижній отвір з’єднаний з одною з порожнин пневмопривода. Верхній отвір має вихід в атмосферу. До середнього отвору підведено стисле повітря.
При подачі напруги на обмотку золотник переміщується вниз і повітря через нижній отвір поступає в робочу порожнину пневмоприводу.
Управляючі пристрої бувають мембранними, струменевими і струменево-мембранними. Струменеві елементи володіють великою швидкодією, але вимагають підсилювальних каскадів. Мембранні пристрої не вимагають підсилювальних каскадів, проте поступаються струменевим елементам в швидкодії.
Одним із способів збільшення числа точок позиціонування при збереженні високої точності виходу робочого органу ПР в задану точку є застосування в конструкції роботів багатопоршневих пневматичних двигунів, одним з різновидів яких є цифровий пневмопривод. Розрізняють лінійні цифрові і ротаційні цифрові пневмоприводы. На рисунку 3.6. зображений лінійний цифровий пневмопривод.

Рис. 3.6 Лінійний цифровий пневмопривод
Він складається з набору взаємозв'язаних, індивідуально керованих за допомогою клапанів α1 , α2 ,…, αn поршнів з ходами х1, х2,… , .хn. При цьому, ход кожного слідуючого поршня в два рази більше хода попереднього поршня, тобто х2 = 2х1 , х3 = 2х2 і т.д. Цифрові пневмоприводи сприймають n – розрядні паралельні двійкові управляючі сигнали. Число дискретних положень таких приводів N = 2n .
Зупинку ланок маніпулятора в проміжних точках можна забезпечити і за допомогою пневмоциліндра з декількома отворами, кожне з яких через електропневматичний клапан має вихід в атмосферу (рис.3.7).
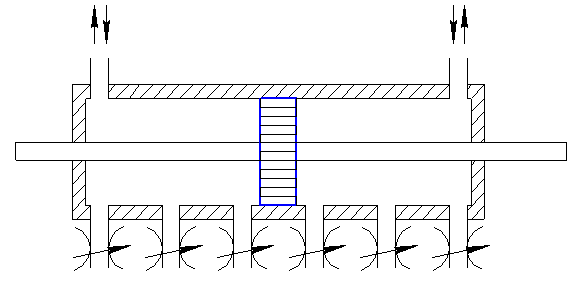
Рис.3.7 Пневмоциліндр з декількома отворами
При відкриванні одного з клапанів, поршень зупиняється зразу ж після проходження відповідного отвору.