

1.7 Три покоління роботів.
В даний час в спеціальній науковій і популярній літературі прийнято ділити роботів на три покоління. Ділення це дещо умовне але воно дозволяє чітко відрізняти особливості різних роботів.
Роботи I покоління – це більшість з нині чинних промислових роботів. Найважливішою відмітною особливістю таких роботів є те, що вони, як правило, не здатні реагувати на зміну зовнішнього середовища. Для роботи таких ПР потрібна, як то кажуть, суворо організоване середовище і вона повинна бути незмінною. Роботи I покоління – це як би „сліпоглухоніма людина”. Обчислювальна потужність систем управління таких роботів мала. Єдина їх інтелектуальна функція – запам'ятовування послідовності дій.
Роботи II покоління – це так звані адаптивні роботи. Вони здатні реагувати на зміну зовнішнього середовища. Програма дії таких роботів автоматично корегується. Роботи II покоління обов'язково повинні мати систему технічного зору (СТЗ). Такі роботи здатні виконувати операції з деталями, лежачими на рухомому транспортері. У систему управління роботів II покоління входять, як правило, мікропроцесори або Мікро-ЕОМ. Це дозволяє розраховувати елементи руху маніпулятора по всіх ступенях рухливості в реальному масштабі часу і у результаті реалізовувати плавне переміщення робочого органу по заданих траєкторіях.
Роботи III покоління – це так звані інтелектуальні роботи. Вони вже почали з'являтися, розкрити їх можливості повністю вдасться ще не скоро. Щоб реалізувати штучний інтелект у роботів III покоління потрібні декілька Мікро-ЕОМ, кожна з яких реалізує автономні функції. Типовий робот III покоління має в своєму розпорядженні спеціальний процесор для кожного із ступенів рухливості і центральний процесор, що координує їх роботу. Дуже складним є математичне забезпечення роботів III покоління.
2 Механіка промислових роботів
2.1 Ступені рухомості і кінематичні пари пр.
У механізмах маніпуляторів використовуються практично тільки однорухомі кінематичні пари (рис.2.1): поступальні (лінійні) і обертальні (поворотні).
поступальні обертальні
Рис 2.1 Однорухомі кінематичні пари
Кожній ступені рухомості відповідає одна кінематична пара. Ступені рухомості ПР ділять на три групи: а) міжпозиційні; б) переносні;
в) орієнтуючі.
Міжпозиційні ступені рухомості зазвичай реалізуються пристроєм пересування. Переносні і орієнтуючі ступені рухомості реалізуються маніпулятором.
Для реалізації переносних ступенів рухомості можуть бути використані як поступальні, так і обертальні кінематичні пари. Для реалізації орієнтуючих ступенів рухомості обов'язково потрібна обертальна кінематична пара. Для реалізації переносу об'єкта в просторі по трьом осям XYZ маніпулятор повинен мати три ступені рухомості. Щоб здійснювати будь-яку орієнтацію об'єкта в просторі маніпулятору потрібно ще три ступені рухомості. Таким чином, маніпулятор з шістьма ступенями рухомості здатний забезпечити і переносні і орієнтуючі рухи об'єкта.
2.2 Схеми маніпуляторів з трьома переносними ступенями
рухомості.
Схеми маніпуляторів з трьома переносними ступенями рухомості є найбільш поширеними. Одна з найбільш поширених схем: схема з трьома поступальними кінематичними парами. Її позначають так: 1Пх2Пу3Пz
(рис 2.2)
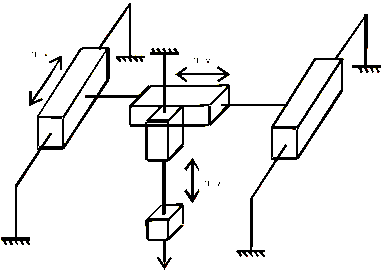
Рис.2.2 Схема з трьома поступальними кінематичними парами
За цією схемою будуються мостові крани, не деякі координатні верстати, маніпулятори складальних і вимірниках ПР.
Достоїнства таких систем:
- простота програмування рухів;
- можливість отримання високої точності;
- збереження орієнтації робочого органу при перенесенні.
Недоліки:
- громіздкість;
- великі маси;
- складність збірки і регулювання.
Робоча зона у ПР з такою схемою маніпулятора – прямокутний паралелепіпед.
 Широко
поширена також схема маніпулятора з
двома поступальними і однією обертальною
кінематичними парами. Це можуть бути
схеми виду 1Пz2Вz3Пх
і 1Вz2Пz3Пх
(рис 2.3). Такі схеми мають близько 75% ПР,
що випускаються. Це роботи з так званою
висувною рукою. Робочою зоною таких ПР
є циліндр. Серйозним недоліком висувної
руки вважають необхідність вільного
простору “за спиною” ПР.
Широко
поширена також схема маніпулятора з
двома поступальними і однією обертальною
кінематичними парами. Це можуть бути
схеми виду 1Пz2Вz3Пх
і 1Вz2Пz3Пх
(рис 2.3). Такі схеми мають близько 75% ПР,
що випускаються. Це роботи з так званою
висувною рукою. Робочою зоною таких ПР
є циліндр. Серйозним недоліком висувної
руки вважають необхідність вільного
простору “за спиною” ПР.
Останніми роками значне число маніпуляторів будують за схемою 1Вz2Bz3Пz (рис2.4.) Вони, як видно, мають дві обертальні і одну поступальну кінематичні пари. ПР з такими маніпуляторами завжди є складальними.
Рис. 2.3 Схеми маніпуляторів з висувною рукою
Рис. 2.4 Схема маніпулятора виду 1Вz2Bz3Пz
ПР, у яких схема маніпулятора має всі три обертальні кінематичні пари, називають антропоморфними (мається на увазі аналогія з людською рукою, у якої суглоби є шарнірами). Найбільш поширеною у антропоморфних ПР є схема виду 1Bz2By3By (рис. 2.5).
Рис.2.5 Схема маніпулятора антропоморфного ПР
Така схема найчастіше використовувалася в технологічних ПР, але останніми роками по такій схемі почали будувати і маніпулятори допоміжних Пр.
Маніпулятори побудовані по такій схемі відрізняються легкістю конструкції.
Недоліки:
- не висока точність позиціонування;
- не зберігається орієнтація робочого органу.
Слід зазначити, що для розширення можливостей маніпулятора в нього вводять додаткові (зайві) ступені рухомості.