

1.2 Использование булевских функций для построения диагностических устройств.
Диагностические устройства представляют собой приборы, моделирующие связи признаков и состояний. Они позволяют автоматически вводить двоичные признаки включением тумблеров и получать сведения о возможных состояниях системы, например, с помощью световых сигналов (загорания лампочек). Связь признаков и состояний систем выражается булевской функцией, которую будем называть булевской диагностической функцией.
Диагностические устройства можно рассматривать как реализацию условий истинности булевской диагностической функции.
Пусть имеются простые (двоичные) признаки kl9 k2, k3i ..., с помощью которых различаются состояния системы. Наличие признака обозначается числом 1, отсутствие признака числом 0. Таким образом,
1 — наличие признака; (14.26)
0— отсутствие признака.
Часто наличие или отсутствие признака kj будем обозначать следующим образом: наличие признака kj (kj = 1); отсутствие признака kj (kj = 0). Состояния системы обозначаются D1 D2 D3 ..., причем наличие состояния соответствует числу 1 и отсутствие числу 0:
1— наличие i-го состояния; 0 — отсутствие i-гo состояния.
Логические методы позволяют выявить состояния, не противоречащие имеющимся техническим сведениям о связях состояний и признаков. К числу логических методов распознавания могут быть отнесены методы теории графов, лингвистические и другие методы, которые здесь не рассматриваются.
Распознавание кривых
Во многих
случаях информация
о состоянии системы (машины) содержится
в виде записи значений диагностического
параметра или его отклонений от
нормального или первоначального уровня
в различные моменты времени.
Результаты представляются в виде
непрерывных функций
х
(кривых)
или совокупности дискретных значений
![]() .
Принципиальной
разницы между этими двумя видами
информации
нет и, ограничиваясь некоторой максимальной
частотой периодической
составляющей, можно указать шаг
квантования, при
котором за период наблюдения Т
непрерывная
и дискретная формы записи эквивалентны.
В других случаях дискретное представление
можно рассматривать как приближенное.
.
Принципиальной
разницы между этими двумя видами
информации
нет и, ограничиваясь некоторой максимальной
частотой периодической
составляющей, можно указать шаг
квантования, при
котором за период наблюдения Т
непрерывная
и дискретная формы записи эквивалентны.
В других случаях дискретное представление
можно рассматривать как приближенное.
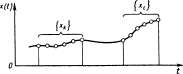
Рис. 2. Обнаружение систематических отклонений по выборочным данным
Для технической диагностики представляет интерес решение двух основных вопросов.
Являются ли наблюдаемые во время эксплуатации изменения кривой х (t) следствием случайных, несущественных изменений в системе или они вызваны более серьезными причинами.
Если отличия в протекании кривой являются значительными, то с какими из возможных состояний системы они связаны. При непрерывном слежении за параметрами системы вторая задача решается после первой, при выборочном наблюдении или анализе указанные задачи независимы.
Основная идея методов распознавания кривых состоит в отображении бесконечного многообразия значений функции в конечномерное пространство признаков.
Различные методы распознавания отличаются выбором системы признаков и способами разделения состояний в пространстве признаков.