

4 Технические предложения по разработке устройств выдачи деталей и системы управления
4.1 Тактовый стол
В качестве транспортно-загрузочного устройства РТК можно использовать тактовый стол, имеющий 48 позиций загрузки-разгрузки.
Тактовый стол (рисунок 4.1) состоит из следующих узлов и деталей: основания 2, четырех виброопор 1, привода, включающий асинхронный электродвигатель 10, червячный редуктор 7 и мальтийский механизм 6, приводной цепи 9 со звездочками 5 и тележек 4, предназначенных для установки транспортируемых деталей.
Электродвигатель и червячный редуктор устанавливаются на раме основания и соединяются между собой с помощью муфты 11 типа МУВП. Выходной вал червячного редуктора соединен с выходным валом мальтийского механизма при помощи муфты 12 типа МУВП.
Мальтийский механизм устанавливается в корпусе 3, который крепится к основанию стола на кронштейнах 16. Аналогично монтируется и вал ведомой звездочки 8 приводной цепи. Натяжение цепи регулируется перемещением данного вала. Ведущая звездочка установлена на выходном валу 14 мальтийского механизма. Звездочки мальтийского механизма фиксируются на валах при помощи прижимных пластин 13 и болтов 15.
В верхней части основания тактового стола на направляющих устанавливаются 48 тележек, которые крепятся к приводной цепи при помощи крючков. Конструкция передней оси тележки обеспечивает ее свободный поворот. На тележках могут быть смонтированы различные ориентирующие приспособления.
Виброопоры предназначены для гашения вибраций при работе тактового стола, а также для облегчения монтажа его узлов при сборке, обслуживании и ремонте.
Схема крепления корпуса клапана на тележке изображена на рисунке 4.2.
В основании тележки 3 закреплен палец 2, на который надевается корпус редукционного клапана 1.
Рассмотрим работу тактового стола. При поступлении сигнала из системы управления робота после захвата детали тактовый стол поворачивается на одну позицию, после чего система управления выдает сигнал, который останавливает электродвигатель стола.
Кинематическая схема привода приведена на рисунке 4.3.

Рисунок 4.1 – Стол поворотный

Рисунок 4.2 – Схема крепления корпуса клапана на тележке

Рисунок 4.3 - Кинематическая схема привода тактового стола: 1 – электродвигатель; 2 – муфта; 3 – червячный редуктор; 4 – мальтийский механизм; 5 – приводная цепь
4.2 Вибробункеры
Определим производительность вибробункера
Qб = Qц Кп,
где Qц – цикловая производительность РТК, Qц = 1/в = 1/96 = 0,01 шт/c;
Кп – коэффициент переполнения, Кп = 1,1.
Qб = 0,01 1,1 = 0,011 шт/с.
Скорость движения заготовки по спиральному лотку
V = Qб l / (K1 К2),
где l – длина детали;
K1 – коэффициент заполнения, K1 = 0,9;
K2 – коэффициент плотности потока деталей, K2 = 0,5.
Для крышки верхней
V = 0,011 12 / (0,9 0,5) = 0,3 мм/c.
Для крышки нижней
V = 0,011 18 / (0,9 0,5) = 0,44 мм/c.
Для плунжера
V = 0,011 81,9 / (0,9 0,5) = 2,0 мм/c.
Для пружины
V = 0,011 50 / (0,9 0,5) = 1,22 мм/c.
Диаметр чаши бункера
Dб > (8…12) l.
Для крышки верхней
Dб > (8…12) 12 = 96…144 мм.
Для крышки нижней
Dб > (8…12) 18 = 144…216 мм.
Для плунжера
Dб > (8…12) 81,9 = 655,2… 982,8 мм.
Для пружины
Dб > (8…12) 50 = 400… 600 мм.
По скорости подачи деталей и диаметру чаши бункера выбираем следующие вибробункеры:
- для крышки верхней и крышки нижней – БВ-16;
- для пружины и плунжера – БВ-63.
4.3 Технические предложения по системе управления
Систему управления необходимо строить на основе современных решений в области проектирования микропроцессорных систем управления и с учетом технических требований, сформулированных в пункте 2.3. В качестве возможного варианта реализации системы управления можно рассмотреть решения на основе программируемых логических контроллеров (ПЛК) серии МЕLSЕС System Q фирмы Mitsubishi.
Процессорные модули серии МЕLSЕС System Q доступны в виде однопроцессорных и мультипроцессорных СРU, благодаря чему они перекрывают широкий диапазон приложений.
Стандартные процессорные модули были разработаны специально для приложений, в которых легче реализовать компактную конфигурацию системы.
Каждый процессорный модуль оборудован интерфейсом RS232С для обеспечения простого программирования и мониторинга с персонального компьютера или рабочей панели, имеет встроенную флэш-память для хранения информации без дополнительных карт памяти, выполняет обработку входов и выходов с режимом обновления.
Общий вид ПЛК Q00 приведен на рисунке 4.4, а технические характеристики на рисунке 4.5.
В качестве блоков дискретных входов и дискретных выходов можно использовать входные и выходные модули модули серии МЕLSЕС System Q, которые доступны для преобразования дискретных сигналов процесса с разными уровнями напряжения в значения, необходимые для контроллера и внешних устройств.
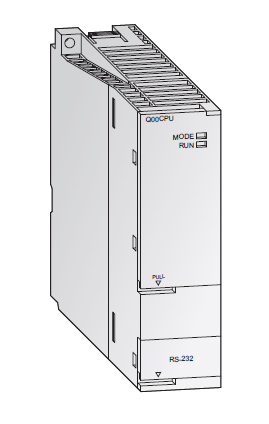
Рисунок 4.4 – Общий вид ПЛК Q00 серии МЕLSЕС System Q
Характерные особенности входных и выходных модулей серии МЕLSЕС System Q:
гальваническая развязка между контроллером и сигнальной линией за счет применения оптронной пары является стандартным свойством;
индикация состояния входов с помощью светодиодов;
модули на 16 входов имеют съемные клеммные панели с креплением под винт;
для модулей с D-Sub разъемами доступны кабели с ответным штепселем (Q32CBL: 3 или 5 метров; Q40CBL: 3 или 5 метров);
доступны различные системные оконечные соединители для упрощения выполнения проводного монтажа для модулей.
В качестве блоков дискретных входов можно использовать модуль дискретных входов QX71, общий вид которого представлен на рисунке 4.6, а технические характеристики на рисунке 4.8.
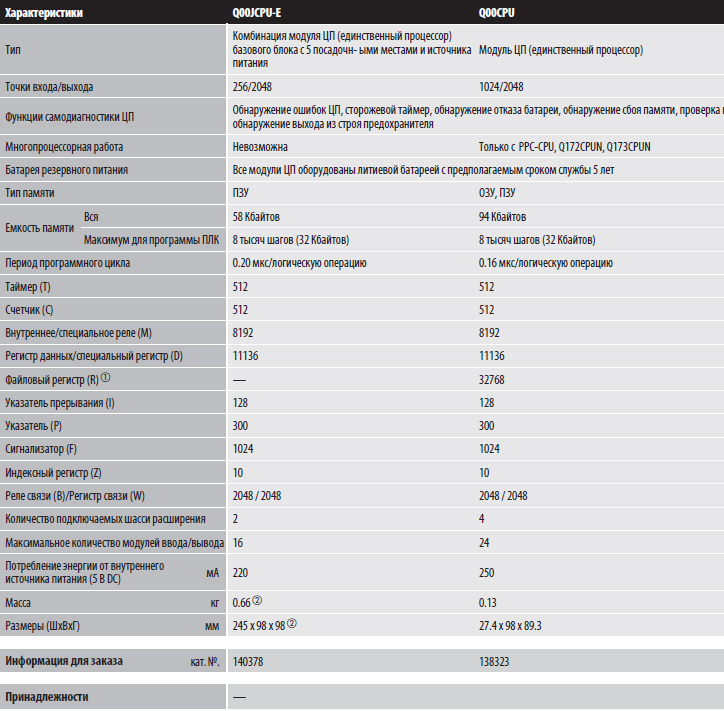
Рисунок 4.5 – Технические характеристики ПЛК Q00 серии МЕLSЕС System Q
В качестве блоков дискретных выходов можно использовать модуль дискретных выходов QY41P, общий вид которого представлен на рисунке 4.7, а технические характеристики на рисунке 4.9.
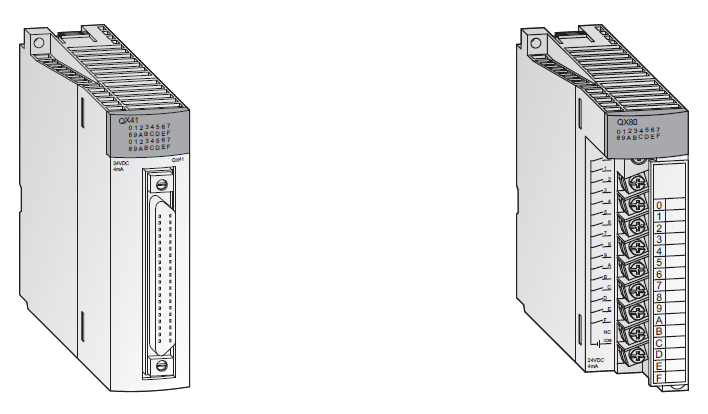
Рисунок 4.6 – Общий вид модуля дискретных входов QX71
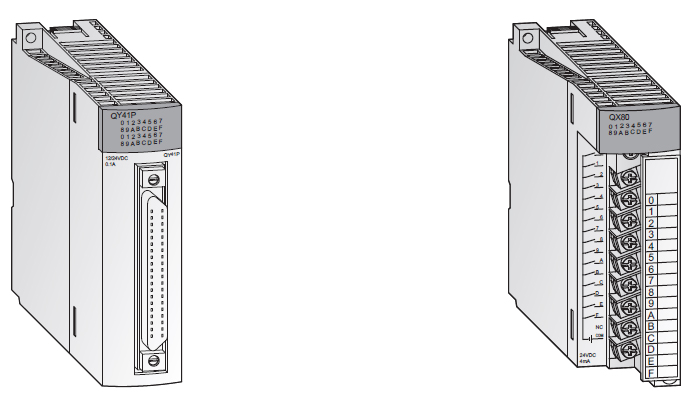
Рисунок 4.7 – Общий вид модуля дискретных выходов QY41P
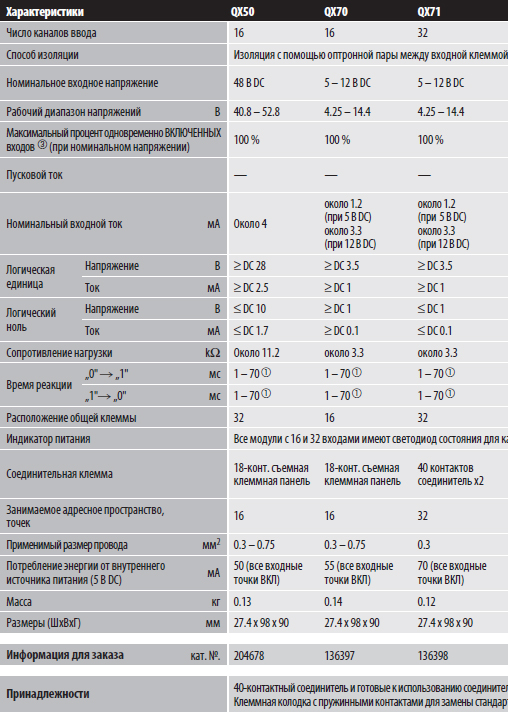
Рисунок 4.8 – Технические характеристики модуля дискретных входов QX71
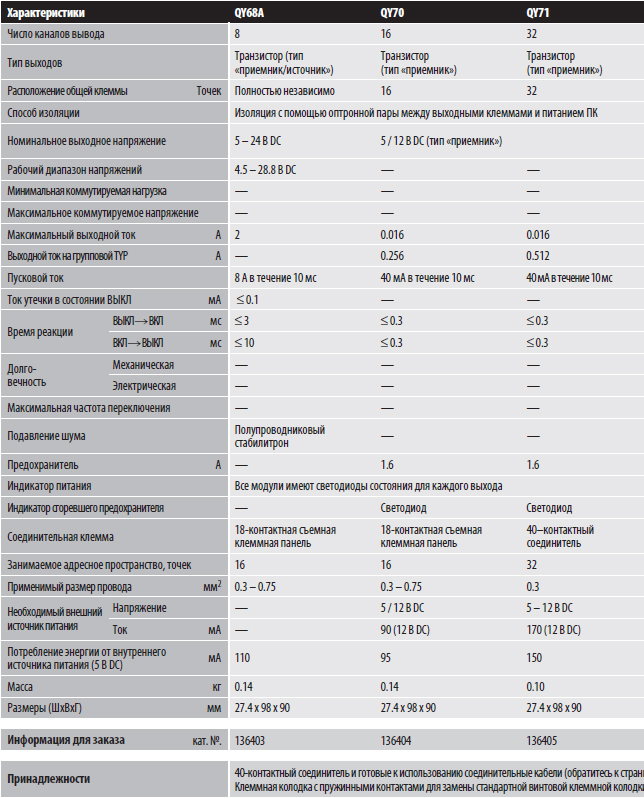
Рисунок 4.9 – Технические характеристики модуля дискретных выходов QY41P
Для вывода аналоговых управляющих сигналов можно использовать один из модулей аналогового вывода серии МЕLSЕС System Q.
Модули аналогового вывода преобразуют цифровые значения, заданные СРU в аналоговые сигналы тока или напряжения. Например, преобразователи частоты, клапаны или задвижки управляются с помощью этих сигналов.
Характерные особенности модулей аналогового вывода серии МЕLSЕС System Q:
до 8 каналов на каждый модуль (Q68DАC) и до 512 каналов на систему;
разрешение 0,333 мВ и 0,83 мкА;
время преобразования 80 мкс/канал;
гальваническая развязка между сигнальной линией и системой управления за счет применения оптронной пары является стандартным свойством;
дополнительная развязка между каналами для Q62DАNQ, 620АN-FGQ, 68DАVN и Q68DАIN;
функция обнаружения обрыва, которая управляет выходным значением с помощью обратного преобразования и функция ограничения возрастания значения (только Q62DАN-FG);
все модули снабжены съемной клеммной панелью с креплением под винт.
В качестве ЦАП можно использовать модуль аналогового вывода Q62DAN, общий вид которого приведен на рисунке 4.10, а технические характеристики на рисунке 4.11.
Для обмена данными с периферийными устройствами можно использовать специализированный модуль интерфейса серии МЕLSЕС System Q.
Этот модуль обеспечивает связь с периферийными устройствами через стандартный интерфейс RS232. Периферийные устройства подключаются по схеме «точка-точка» по принципу «1:1».
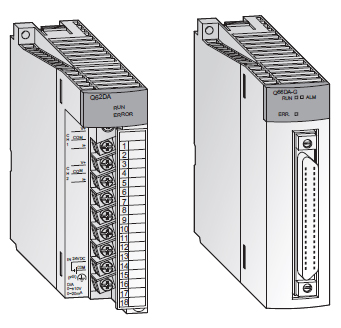
Рисунок 4.10 – Общий вид модуля аналогового вывода Q62DAN
Характерные особенности модуляинтерфейса серии МЕLSЕС System Q:
– модуль QJ71С24N имеет один интерфейс RS232 и один интерфейс RS422/485, модуль QJ71C24-R2 имеет два интерфейса RS232, а модуль QJ71С24N-R4 - два интерфейса RS422/485;
– позволяет компьютеру, подключенному к системе, получать полный доступ ко всему набору данных СРU МЕLSЕС Q, используя SСАDА систему или программное обеспечение для мониторинга;
– встроенная память типа "флэш-RОМ" для сохранения данных качества, производительности или сигнализации. Эти данные можно распечатывать по мере необходимости;
– светодиоды служат для индикации рабочего состояния и состояния коммуникации;
– проверка связи и функция мониторинга возможны при использовании программного обеспечения (GХ Configuration UT.
Выбираем в качестве устройства для связи с системой верхнего уровня модуль интерфейса QJ71С24N, общий вид которого представлен на рисунке 4.12, а технические характеристики на рисунке 4.13.
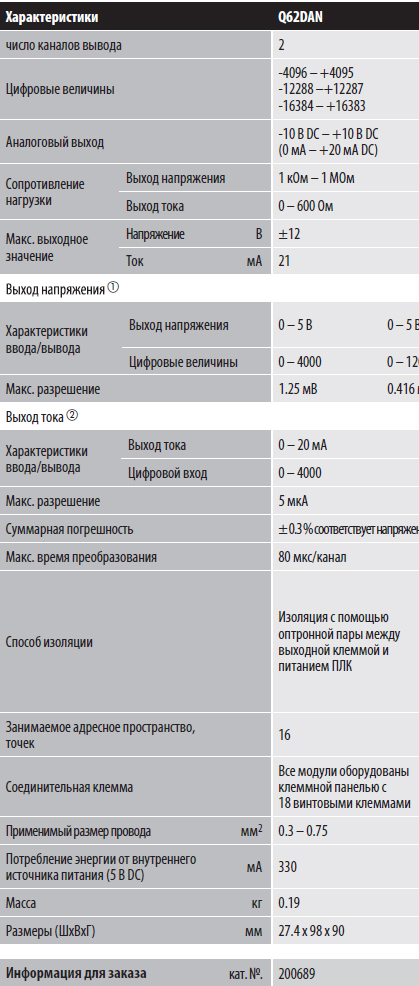
Рисунок 4.11 – Технические характеристики модуля аналогового вывода Q62DAN
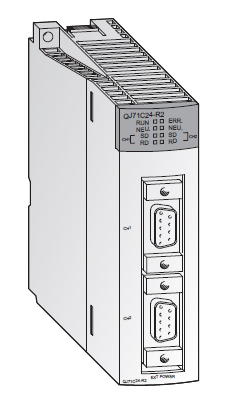
Рисунок 4.12 – Общий вид модуля интерфейса QJ71С24N
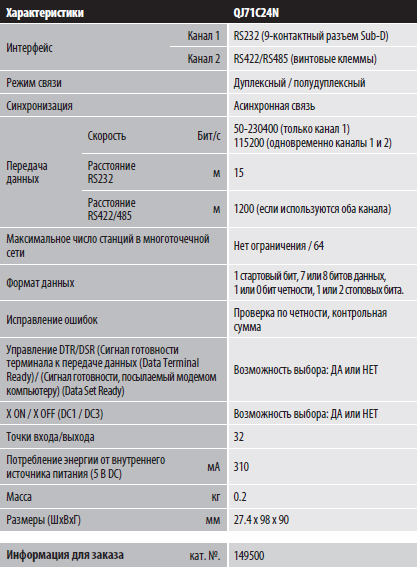
Рисунок 4.13 – Технические характеристики модуля интерфейса QJ71С24N