

2.3.2. Силовой расчет группы звеньев 4 и 5
Выделим
из механизма группу звеньев 4 и 5 в
масштабе
![]() (рис.
2.6). В характерных точках расставим силы
и моменты сил, действующие на звенья
структурной группы. Действие на
рассматриваемую группу отброшенных
звеньев заменяем реакциями. В индексе
обозначения реакций ставятся две цифры:
первая показывает, со стороны какого
звена действует сила, а вторая – на
какое звено действует сила.
(рис.
2.6). В характерных точках расставим силы
и моменты сил, действующие на звенья
структурной группы. Действие на
рассматриваемую группу отброшенных
звеньев заменяем реакциями. В индексе
обозначения реакций ставятся две цифры:
первая показывает, со стороны какого
звена действует сила, а вторая – на
какое звено действует сила.
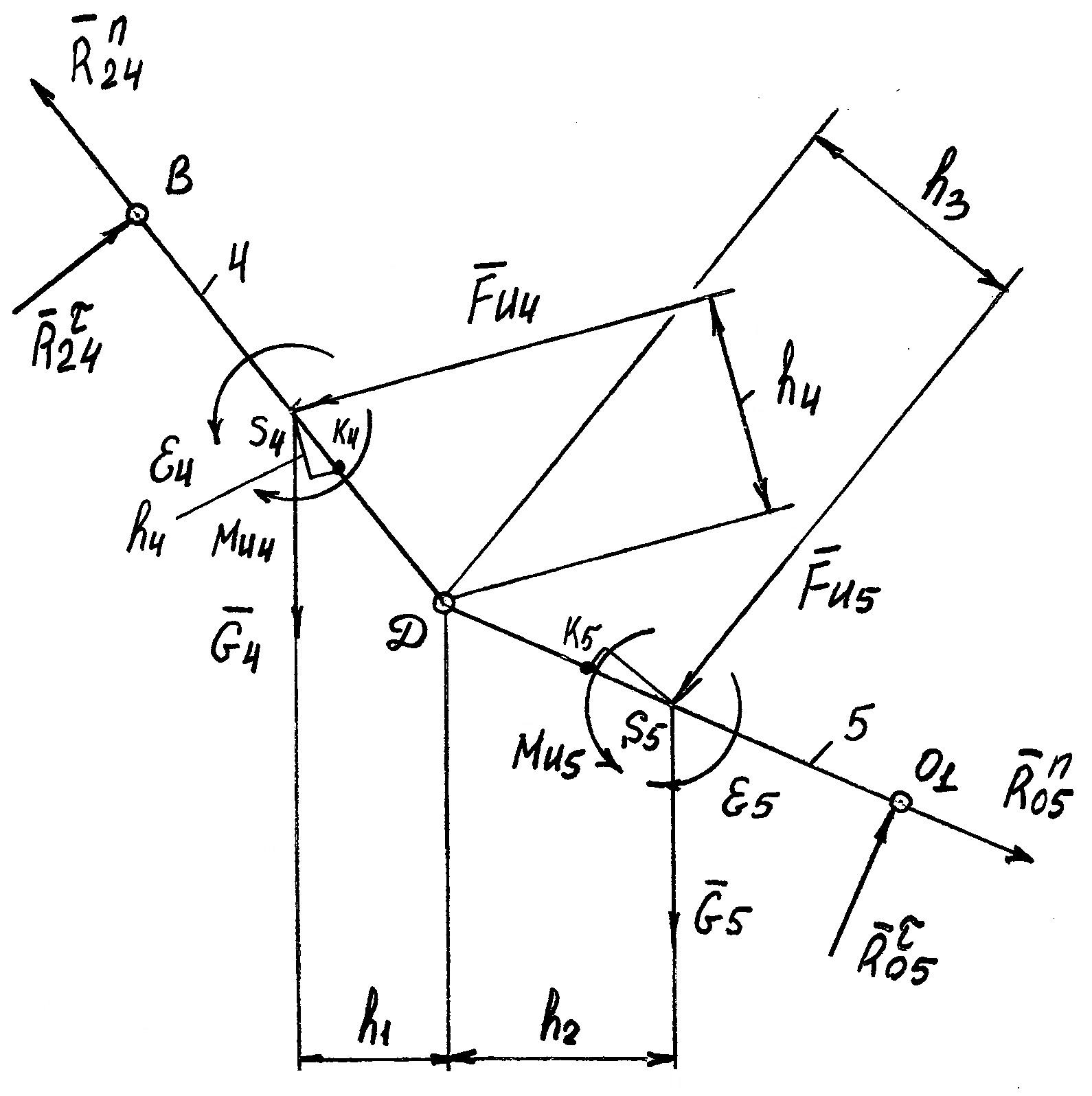
Рис. 2.6. Группа из 4 и 5 звеньев механизма, μl = 0,008 м/мм
Определим
реакцию
![]() из уравнения
из уравнения
![]() .
.
 .
.
Величины
![]() ,
,![]() ,
,![]() ,
изображенные в масштабе
,
изображенные в масштабе
![]() ,
сняты с чертежа в мм, поэтому
,
сняты с чертежа в мм, поэтому
![]() необходимо делить на масштаб
.
необходимо делить на масштаб
.
Определим
реакцию
![]() из уравнения
из уравнения
![]() .
.
 .
.
Определим
реакции
![]() ,
,![]() ,
,![]() ,
,![]() из векторного уравнения
из векторного уравнения
![]() ,
,
![]() .
.
Строим план сил для группы звеньев 4 и 5 в масштабе
![]() (рис.
2.7).
(рис.
2.7).

Рис. 2.7. План сил для группы звеньев 4 и 5, μF = 4,48 Н/мм
Тогда вектора-отрезки сил на плане сил будут:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Из
плана сил
![]()
![]() ;
;
![]() ;
;
![]() .
.
Определим
реакцию
![]() из векторного уравнения
из векторного уравнения
![]() ,
,
![]() .
.
Из
плана сил
![]() – на чертеже показана пунктиром.
– на чертеже показана пунктиром.
2.3.3. Силовой расчет группы звеньев 2 и 3
Выделим
из механизма группу звеньев 2,3 и расставим
все нагрузки: силы тяжести; силы инерции
и моменты
сил инерции; реакции со стороны отброшенных
звеньев. В точке B
действует реакция
![]() со стороны отброшенного четвертого
звена на второе.
равна
со стороны отброшенного четвертого
звена на второе.
равна
![]() и направлена противоположно (рис. 2.8).
и направлена противоположно (рис. 2.8).

Рис. 2.8. Группа звеньев 2 и 3, μl=0,008 м/мм
Определим
реакцию
![]() из уравнения
из уравнения
![]() :
:
![]() .
.
 ;
;
 .
.
Определим
реакции
![]() ,
,
![]() ,
,
![]() из векторного уравнения
из векторного уравнения
![]() :
:
![]() .
.
Зная
силы, выберем масштаб сил
![]() и вычислим соответствующие им длины
отрезков:
и вычислим соответствующие им длины
отрезков:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Строим
план сил для группы звеньев 2 и 3 (рис.
2.9). Из плана сил определим
,
,
![]() :
:
![]() ;
;
![]() ;
;
![]() .
.

Рис. 2.9. План сил для группы звеньев 2 и 3, μF = 6,9 Н/мм
Определим
реакцию
![]() из векторного уравнения
из векторного уравнения
![]() ,
,
![]() .
.
Из
плана сил
![]() (на чертеже показана штриховой линией).
(на чертеже показана штриховой линией).
2.3.4. Силовой расчет ведущего звена
Рассмотрим
силовой расчет ведущего звена 1 (рис.
2.10). Так как кривошип уравновешен, центр
масс находится в точке O
звена, то
![]() .
При этом считается, что масса противовеса,
расположенного от оси вращения на
расстоянии
.
При этом считается, что масса противовеса,
расположенного от оси вращения на
расстоянии
![]() ,
равна массе кривошипа m1
и равнодействующая сила тяжести
,
равна массе кривошипа m1
и равнодействующая сила тяжести
![]() .
.
Со
стороны отброшенного второго звена на
первое действует реакция
![]() .
Определим уравновешивающий момент из
уравнения
.
Определим уравновешивающий момент из
уравнения
![]() :
:
![]() ;
;![]() .
.
-

Рис. 2.10. Силовой расчет ведущего звена (план сил, μF = 5,1 Н/мм)
Реакцию
со стороны стойки на кривошип
![]() определим из векторного уравнения
определим из векторного уравнения
![]() :
:
![]() .
.
Строим
план сил в масштабе
![]() .
Вектора-отрезки сил на плане сил в
масштабе μF
равны:
.
Вектора-отрезки сил на плане сил в
масштабе μF
равны:
![]() ,
,
![]() .
Из плана сил
.
Из плана сил
![]() .
.
2.4. Определение уравновешивающего момента методом возможных перемещений
В
тех случаях, когда требуется определить
уравновешивающий момент и уравновешивающую
силу без предварительного определения
реакций в кинематических парах, можно
воспользоваться принципом возможных
перемещений. Если система, состоящая
из n
звеньев, находится в равновесии, то
сумма мгновенных мощностей всех сил и
моментов, приложенных к звеньям механизма,
должна равняться нулю. При этом
уравновешивающий момент
![]() определяется из следующего уравнения:
определяется из следующего уравнения:
![]() ,
,
где
ω1
– угловая скорость кривошипа, с-1;
Fi
– силы, приложенные в характерных точках
плана скоростей, перенесенные на план
скоростей без изменения своего
направления, Н;
![]() – проекции скоростей точек приложения
сил на направление действия сил, мм; μV
– масштаб плана скоростей,
– проекции скоростей точек приложения
сил на направление действия сил, мм; μV
– масштаб плана скоростей,
![]() .
.
При этом целесообразно провести предварительную замену силы инерции и момента сил инерции на одну силу, приложенную в центре качения (рис. 2.11).
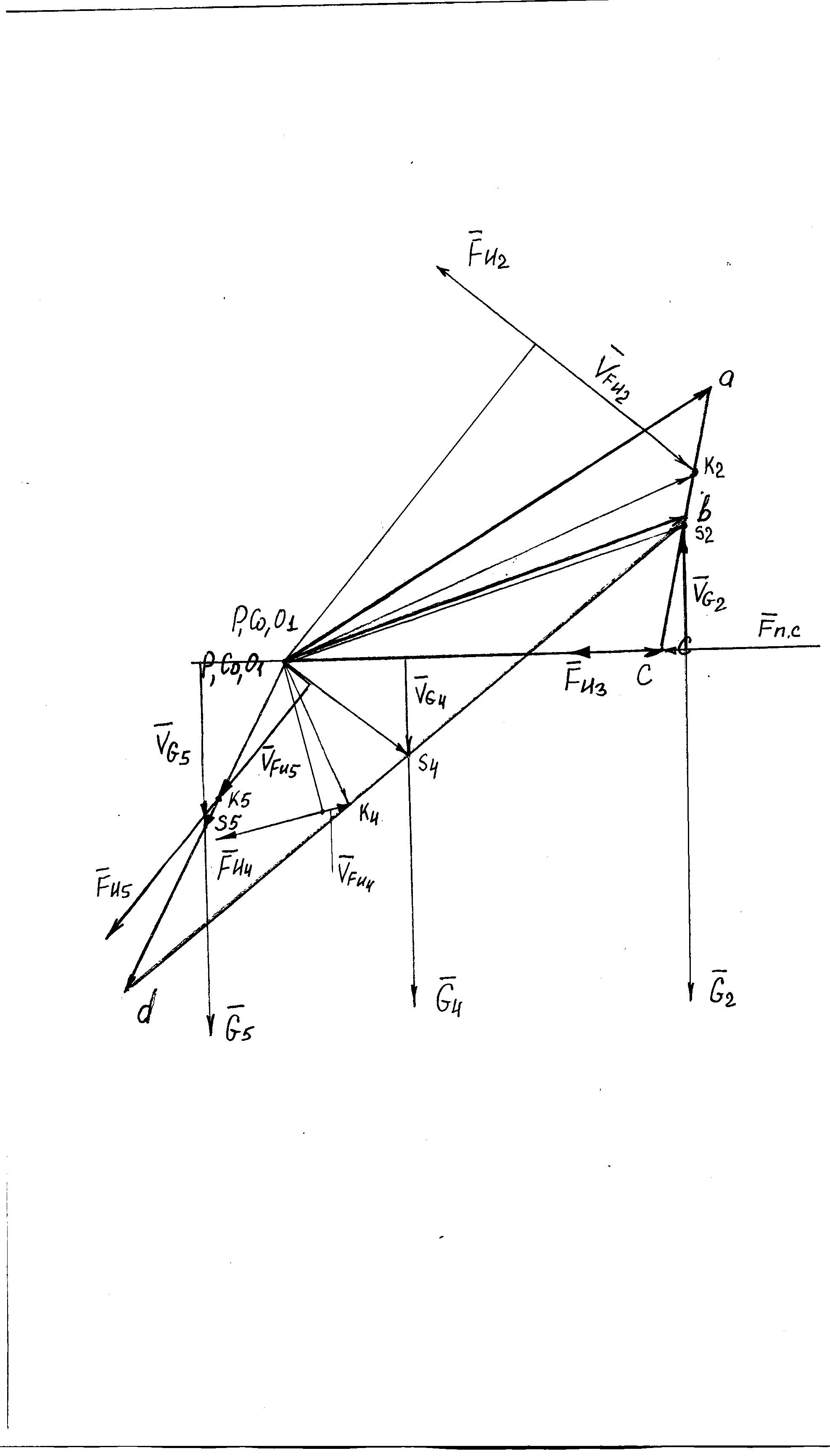
Рис. 2.11. Определение уравновешивающего момента методом возможных
перемещений, μV = 0,025 м/с·мм
Для проведения замены определим расстояния hi (плечи пар сил) для каждого звена:
![]() .
.
 ;
;
 ;
;
 .
.
Величины плеч на чертеже равны:
![]() ;
;
![]() ;
;
![]() .
.
Определим точки качения Ki на звеньях (рис. 2.6 и рис. 2.8). Основываясь на свойстве подобия плана скоростей и плана механизма, определим положения точек качения Ki на плане скоростей (рис. 2.11).
Для второго звена:
![]() ;
;
![]() .
.
Для четвертого звена:
![]() ;
;
![]() .
.
Для пятого звена:
![]() ;
;
![]() .
.
В
характерные точки плана скоростей
(центры масс Si,
расположенные посередине звеньев, точки
качения Ki)
приложим силы тяжести и силы инерции.
Силу полезного сопротивления
![]() приложим в точке С
плана скоростей (рис. 2.11).
приложим в точке С
плана скоростей (рис. 2.11).
Определив
проекции скоростей точек приложения
сил
на направление действия сил
![]() ,
найдем уравновешивающий момент
,
найдем уравновешивающий момент

Учитывая,
что произведения
![]() необходимо брать со знаком «плюс», если
направления сил Fi
и проекций скоростей
совпадают,
и со знаком «минус», если направления
сил Fi
и проекций скоростей
противоположны.
Получим
необходимо брать со знаком «плюс», если
направления сил Fi
и проекций скоростей
совпадают,
и со знаком «минус», если направления
сил Fi
и проекций скоростей
противоположны.
Получим

![]() .
.
Знак «плюс» показывает, что направление уравновешивающего момента совпадает с направлением угловой скорости входного звена.
Относительная погрешность в определении уравновешивающего момента двумя методами составит:
![]() .
.
Она не должна превышать 4%.