

Начальная ордината графика ускорений определяется из формулы
![]() .
.
Начальная и конечная точки графика за период цикла движения должны иметь одинаковые ординаты.
Для проверки правильности построения графиков служат следующие зависимости между графиками функции (скорости) и графиками её производной (ускорения):
максимальной или минимальной ординате графика скорости соответствует нулевая ордината ускорений;
точке перегиба графика скорости соответствует максимум или минимум графика ускорений.
При
графическом дифференцировании заданы:
масштаб времени
![]() ,
масштаб скорости
,
масштаб скорости
![]() ,
полюсное расстояние H,
мм. Масштаб графика ускорений определяется
по формуле
,
полюсное расстояние H,
мм. Масштаб графика ускорений определяется
по формуле
![]() .
.
1.5. Графическое интегрирование
Графическое интегрирование является задачей, обратной дифференцированию.
Положим, что движение точки задано графиком ускорений (рис. 1.5, а) и требуется построить график скорости . Разбивая ось времени t на ряд участков, заменяют внутри каждого участка переменное ускорение постоянным средним ускорением, проводя горизонтальный отрезок с ординатой, изображающей это среднее ускорение так, чтобы площади выступающих и входящих углов были одинаковыми (рис. 1.5, а).
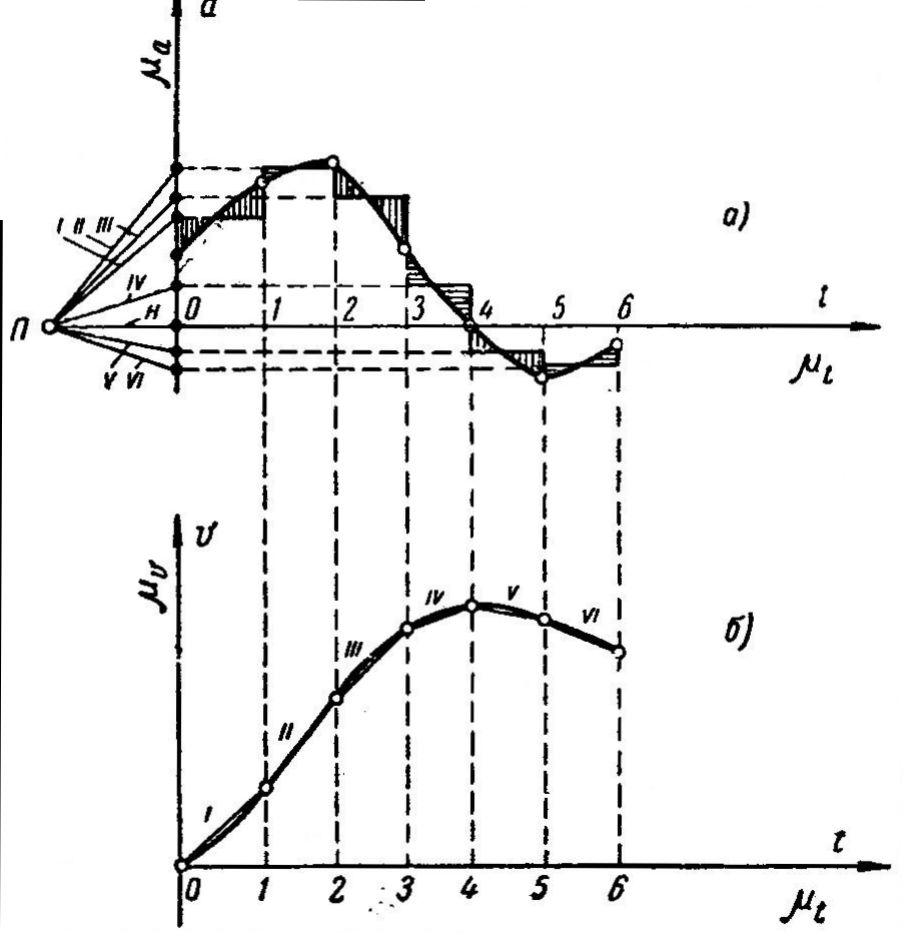
Рис. 1.5. Графическое интегрирование
Ординаты полученных средних ускорений сносят на ось ускорений и соединяют лучами I, II, III… с полюсом П, взятым на расстоянии H, мм, от начала координат.
На
том же чертеже, ниже системы осей (a,
t)
строят систему осей (V,
t)
(рис. 1.5, б)
и из точки O
начала этих осей на соответствующих
участках проводят отрезки, параллельные
лучам I,
II,
III
и т.д. Затем строят первую линию,
которая приближенно представляет
искомый график
![]() .
.
Так как график рекомендуется строить от крайних положений входного звена, в которых его скорость равна нулю, то график скорости строится от начала координат. Масштаб полученного графика связан с масштабом графика ускорений и полюсным расстоянием формулой
![]() .
.
2. Силовой анализ рычажного механизма (графоаналитический метод)
2.1. Задачи и последовательность проведения силового анализа
Задачей силового анализа механизмов является определение сил, действующих на звенья механизма, и реакций в кинематических парах, а также уравновешивающих момента или силы на ведущем звене.
К заданным силам относятся: движущие силы, силы производственных сопротивлений, силы веса звеньев и условно силы инерции звеньев, зависящие от их масс и ускорений.
При проведении силового расчета пользуются методом кинетостатики, который заключается в том, что если к движущейся с ускорением системе, кроме внешних сил, добавить силы инерции, то все силы, действующие на систему, будут уравновешены и к ней могут быть применены теоремы статики.
В проекте силовой расчет производят для одного из двух положений механизма: внутри интервала рабочего хода с учетом сил производственных (полезных) сопротивлений, в интервале холостого хода без учета сил производственных (полезных) сопротивлений. Определение движущих сил или сил производственных сопротивлений производится по данным, приведенным в заданиях, индикаторных диаграммах, графиках сил полезных сопротивлений и т. п.
Для определения реакций в кинематических парах механизм разделяется на структурные группы. Воздействие других звеньев механизма на звенья отсоединенной группы заменяются силами реакций, каждую из которых удобно разложить по направлению звена (нормальную составляющую) и перпендикулярно этому направлению (тангенциальную составляющую).
Тангенциальные составляющие определяются из уравнений моментов сил, составленных для отдельных звеньев, входящих в структурную группу. Нормальные составляющие реакций определяются построением векторного многоугольника: геометрическая сумма сил, действующих на рассматриваемую структурную группу, должна равняться нулю.
Силовой
расчет начинают с наиболее удаленной
от входного звена структурной группы
и заканчивают расчетом входного звена.
К входному звену может быть приложен
уравновешивающий момент или уравновешивающая
сила. Если кривошипный вал соединен с
двигателем, то в этом случае к валу
приложен уравновешивающий момент
![]() ,
а реакция в опоре вала
,
а реакция в опоре вала
![]() будет равна действию второго звена на
кривошип
будет равна действию второго звена на
кривошип
![]() (рис. 2.1).
(рис. 2.1).
Если кривошипный вал соединен с двигателем посредством зубчатой передачи, то в этом случае на звено АВ действует уравновешивающая сила со стороны сопряженного колеса под углом (90°- αw) к линии центров колес (αw – угол зацепления) (рис. 2.2, а); величина уравновешивающей силы Fу определяется из равенства
![]() .
.
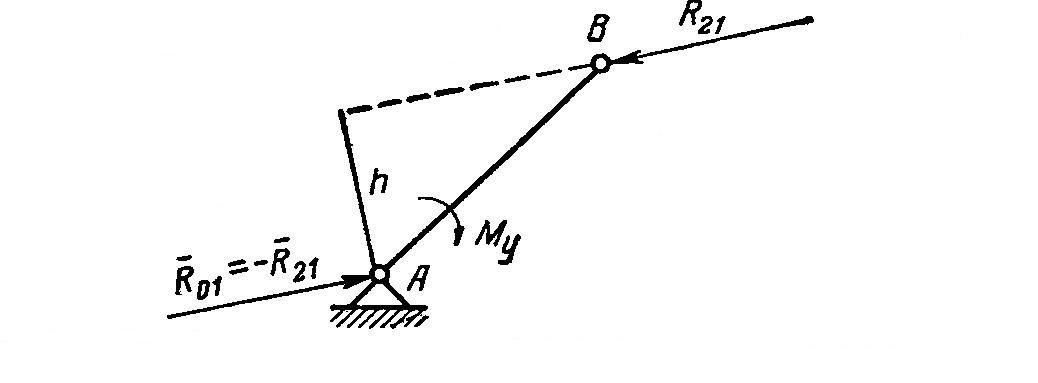
Рис. 2.1. К определению уравновешивающего момента

Рис. 2.2. К определению уравновешивающей силы
Реакция
может быть определена из векторного
уравнения
![]() ,
в
котором имеется один неизвестный вектор
.
Графическим решением этого уравнения
является треугольник сил, показанный
на рис.
2.2, б.
,
в
котором имеется один неизвестный вектор
.
Графическим решением этого уравнения
является треугольник сил, показанный
на рис.
2.2, б.