

2.16. Устойчивость импульсного сау
По аналогии с непрерывной системой, импульсная система устойчива, если реакция на ограничение входное воздействии так же ограничена.
1 – неустойчива, 2 – устойчива, 3 – на грани устойчивости.
При использовании Д преобразования, характерное уравнение замкнутой импульсной системы имеет вид:
 (1)
(1)
Для непрерывной системы:

Импульсная система
устойчива, если все корни хар-го ур-ия
(1) находится в левой комплексной
полуплоскости: .
.
При использовании Д-преобразования для определения устойчивости импульсной системы нельзя воспользоватся критерием Рауса-Гурвици для непрерывной системы, т к усл совпадают, но не совпадает форма записи хар-го ур-ия.
При использовании Z-преобразования хар-го ур-ия имеет вид:
 ,
,
 (2)
(2)
П редположим
редположим
 ,
тогда:
,
тогда:
 ,
т е
,
т е
 ,
,
 ,
,
 ,
т е
,
т е

Импульсная система
будет устойчива, если все корни хар-го
ур-ия (2) по модулю <1:
 .
.
Корни должны лежать в нутрии этой окружности:
При использовании Z-преобразования так же нельзя воспользоватся Крит Рауса-Гурвица для непрерывной системы, так как форма записи хар-го ур-ия совпадает, но не совпадает условие устойчивости.
В ТАУ для анализа и синтеза импульсных САУ, помимо Д и Z преобразований используется W преобразование:
 (3)
(3)
 (4)
(4)
При

 ,
т е условия устойчивости совпадают. Из
(2) следует:
,
т е условия устойчивости совпадают. Из
(2) следует:

 (5)
(5)
При использовании W преобразования форма записи хар-го ур-ия и усл. устойчивости совпадают с формой записи и усл. устойчивости для нелинейной системы.
Импульсная система
будет устойчива если все коэф
 ,
а так же больше 0 углов минора Гурвицовой
матрици:
,
а так же больше 0 углов минора Гурвицовой
матрици:
 .
Алгебраический критерий устойчивости
для импульсных систем называется
критерием Шур-Кона
.
Алгебраический критерий устойчивости
для импульсных систем называется
критерием Шур-Кона

Выводим усл устойчивости для импульсной системы 1-го и 2-го порядка.
 ;
;
 ;
; ;
;
 ;
;
 .
.
Вывод: импульсная система 1-0 и 2-0 порядка может быть неустойчивой, т е введение импульсного элемента снижает устойчивость системы.
Для 2-го порядка:
 ;
;
 ;
; ;
;
 ;
;
;
;
 .
.
2.17. С-МА ЭКСТРЕМАЛЬНОГО УПР. (СЭУ). ФУНК. СХЕМА ЭЛЕКТРОТРАНСМИССИИ.
СЭУ могут быть построены только для объектов в которых выходная величина имеет экстремальную зависимость от входной.
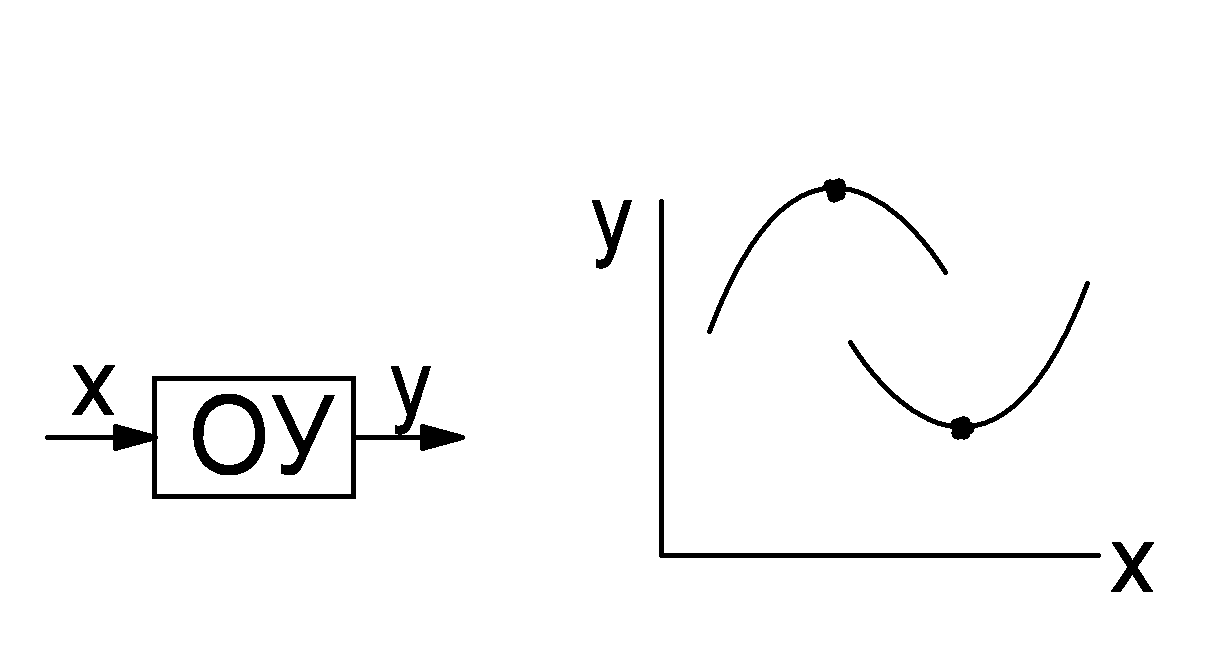
Целью функционирования ЭС является ОУ в точке экстремума
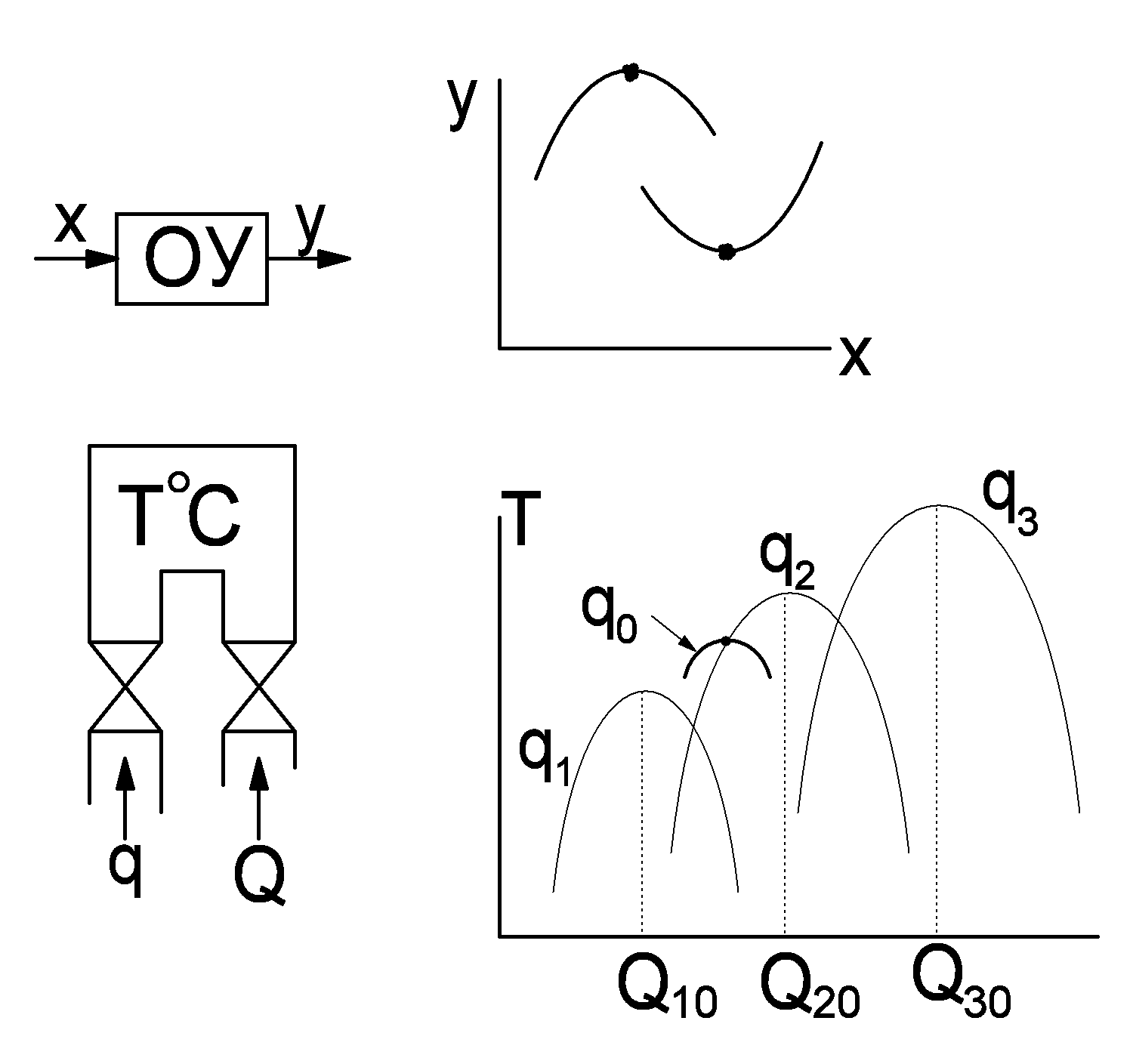

q – величина подачи топлива; Q – величина подачи воздуха.
 .
.
Для каждой подачи топлива есть своя подача воздуха, при которой температура в печи максимальна. Из графиков возможно построение системы обеспечения поддержания температуры при min расходе топлива.
Все Устр снабжаются центробежными регуляторами скорости. Водитель педалью газа задает не подачу топлива, а частоту вращения двигателя, а регулятор выбирает количество подводимого топлива.
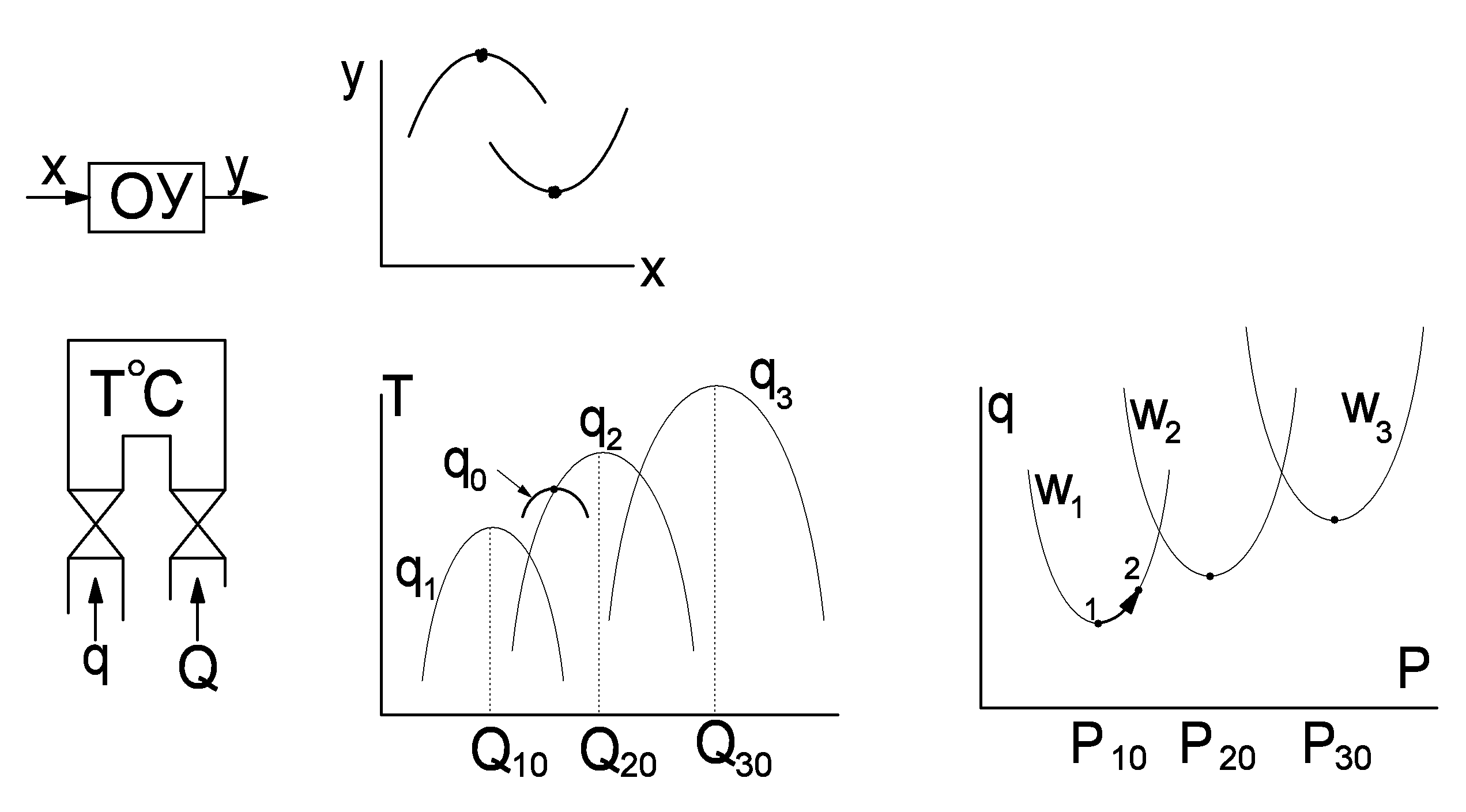

q – идеальный расход топлива.
Для каждой частоты вращения существует оптимальная загрузку по мощности:
 .
.
На автомобилях грузоподъемностью > 25тон используется электротрансмиссия.
![]()

На одном валу с дизелем находится генератор, который питает ЭД, соединенный с валом колеса (мотор-коллесо).
ДС – датчик скорости, измеряет частоту вращения дизеля;
ПР – преобразователь, питающий ОВГ;
РМ – регулятор мощности;
БУ – Блок умножения, на выходе которого получается мощность, которую развивает генератор;
НБ – нелинейный блок, который независимо отчастоты вращения задает необходимую мощность, которая стабилизируется.
Сама Система является экстремальной, она является системой стабилизации мощности.