

Работа 1. Определение ускорения свободного падения при помощи оборотного и математического маятников
Задание 1: определить ускорение свободного падения при помощи оборотного маятника с предельной относительной погрешностью , не превышающей 5 %.
Задание 2: определить ускорение свободного падения при помощи математического маятника с предельной относительной погрешностью , не превышающей 5 %.
Оборудование и принадлежности: установка для проведения измерений, линейка.
Описание установки
Рис. 1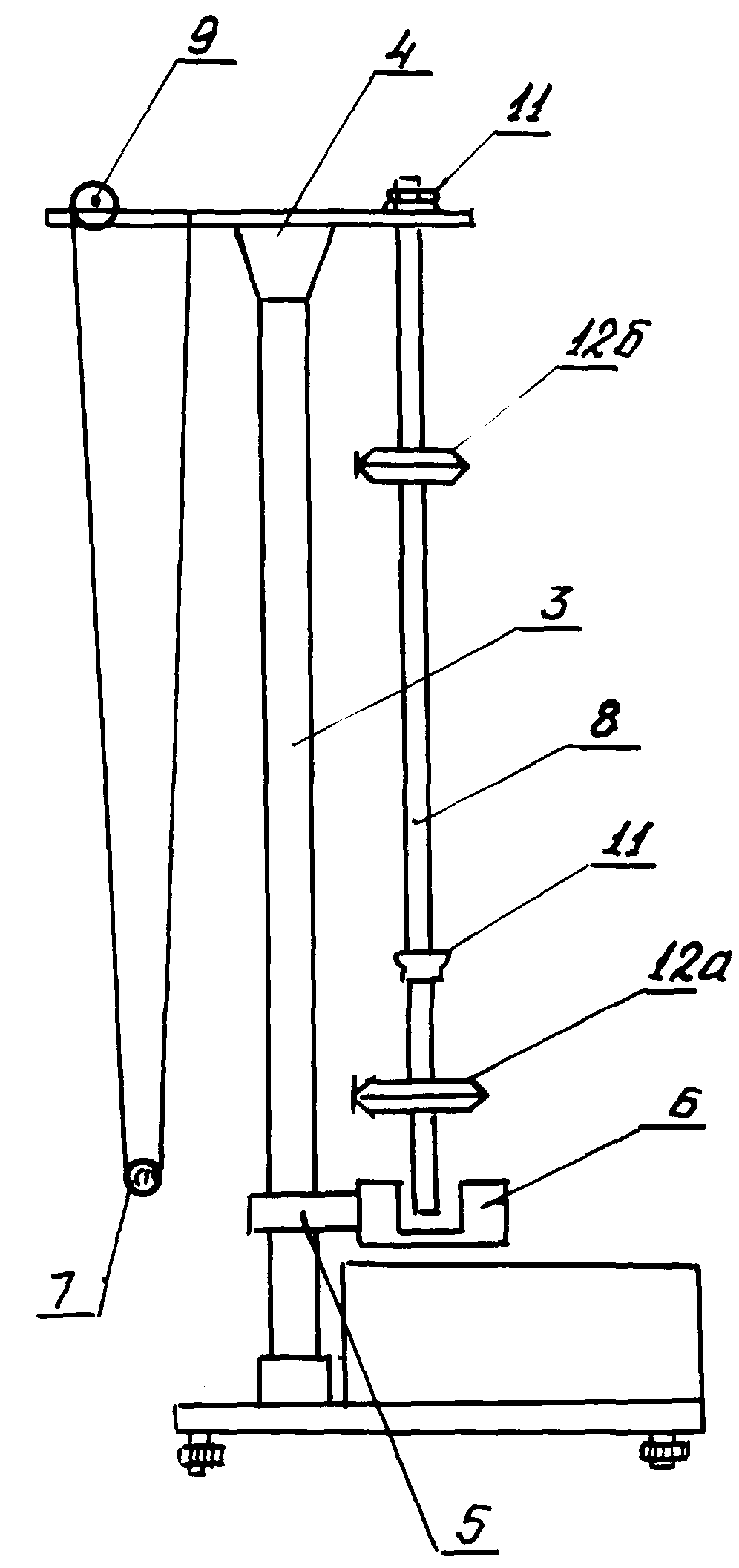
Оборотный маятник выполнен в виде стального стержня, на котором фиксируются две повернутые лезвиями друг к другу опорные призмы 11 и две чечевицы (подвижных груза) 12а и 12б.
На стержне через 10 мм нанесены кольцевые углубления, служащие для определения приведенной длины L оборотного маятника (расстояние между опорными призмами). Призмы и чечевицы можно перемещать вдоль стержня и фиксировать в любом положении. Эти элементы выполнены таким образом, что расстояние между ними является кратным 10 мм, а фиксирующие воротки размещены так, чтобы при помощи кольцевых углублений их можно было бы фиксировать в нужном положении.
Нижний кронштейн 5 вместе с фотоэлектрическим датчиком можно перемещать вдоль колонки 3 и фиксировать в произвольно выбранном положении.
Элементы теории
Рис. 2
![]() (1)
(1)
где Mz – проекция момента силы тяжести на ось Z, I – момент инерции маятника относительно оси колебаний, z – проекция углового ускорения на ось Z. Учитывая, что Mz = –mgasin, z = d2/dt2, получим
![]() , (2)
, (2)
где m – масса маятника, a –
расстояние от оси вращения до центра
масс маятника,
– угловое перемещение маятника (угол
отклонения маятника от положения
равновесия). Угловое перемещение –
векторная величина, его направление
определяется по правилу буравчика. В
данном случае векторы
![]() и
и
![]() направлены в противоположные стороны,
поэтому выражение для Mz
записано со знаком минус.
направлены в противоположные стороны,
поэтому выражение для Mz
записано со знаком минус.
При малых углах отклонения sin , в этом случае уравнение (2) можно записать в виде
![]() +
+
![]() (3)
(3)
Уравнение (3) представляет собой уравнение гармонических колебаний переменной величины , квадрат угловой частоты которых равен коэффициенту перед во втором слагаемом. То есть
![]() (4)
(4)
Решение уравнения (3) можно записать в виде
(t) = ocos(t + o), (5)
где o – угловая амплитуда колебаний, o – начальная фаза колебаний.
Из вышеизложенного следует, что колебания физического маятника (как и математического маятника) не являются гармоническими. Они будут мало отличаться от гармонических колебаний лишь в том случае, когда выполняется условие sin , то есть, когда угол отклонения маятника от положения равновесия небольшой.
Из формулы (4) находим период колебаний физического маятника:
![]() (6)
(6)
Период колебаний математического маятника длиной L вычисляется по формуле
![]() (7)
(7)
Сравнивая формулы (6) и (7), приходим к выводу, что математический маятник, длина которого
![]() , (8)
, (8)
будет совершать колебания с тем же периодом, что и данный физический маятник. Точка, находящаяся на расстоянии L (рис. 1) от оси вращения физического маятника на прямой, проходящей через его центр масс перпендикулярно оси вращения, называется центром качания физического маятника. Величина L, вычисляемая по формуле (8), называется приведенной длиной физического маятника.
По теореме Гюйгенса – Штейнера
I = Io + ma2, (9)
где Io – момент инерции физического маятника относительно оси, проходящей через его центр масс параллельно оси колебаний.
Подставив (9) в (8), получим
![]() (10)
(10)
Рис. 3
![]() . (11)
. (11)
Подвесим маятник на оси, параллельной прежней и проходящей через центр качания С (рис. 3). В этом случае приведенная длина маятника
![]() (12)
(12)
По теореме Гюйгенса – Штейнера
![]() Подставив это выражение в (12), а также
учитывая, что a1 = Io/ma
= L - a, получим
Подставив это выражение в (12), а также
учитывая, что a1 = Io/ma
= L - a, получим
![]() .
.
Так как приведенная длина физического маятника относительно новой оси не изменилась, то и период его колебаний на новой оси также не изменился. Следовательно, данная ось и параллельная ей ось, проходящая через центр качания маятника, обладают свойством взаимности.
Ускорение свободного падения можно вычислить по формуле
![]() . (13)
. (13)
При определении ускорения свободного падения с помощью оборотного маятника необходимо, изменяя его момент инерции (передвигая чечевицу 12а), добиться того, чтобы расстояние между опорными призмами стало равным приведенной длине оборотного маятника. Измерив L и T, по формуле (13) находим g.
Для определения ускорения свободного падения с помощью математического маятника необходимо измерить его длину L, соответствующий ей период колебаний T и по формуле (13) вычислить g.
Чтобы повысить точность измерения периода колебаний T, необходимо измерить время t для n колебаний (обычно n = 10). Тогда
![]() . (14)
. (14)