

1.5.3 Алгоритм решений изобретательских задач (ариз)
1. Формулировка задачи (мини-задачи);
2. Нахождение технического противоречия (ТП).
Техническое противоречие состоит в том, что к одному и тому же элементу или изделию предъявляются два взаимоисключающих требования. Например, направляющая прибора должна обладать высокой точностью, и должна быть не точной, чтобы не увеличивать цену прибора, рисунок 1.9.
ИЗМЕРЕНИЕ РАДИАЛЬНОГО БИЕНИЯ
ИЗМЕРЕНИЕ РАДИАЛЬНОГО БИЕНИЯ
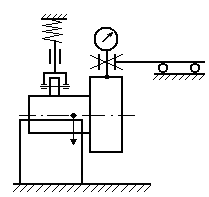
Рисунок 1.9 – Схема измерения радиального биения
3. Усилим конфликт → идеальный конечный результат (УК → ИКР). (Например, индикатор движется, но без направляющих);
4. Введение Х-элемента (Х-элемент обеспечивает движение индикатора прямолинейно и параллельно оси детали);
5. Разрешение технического противоречия (ТП). Существует 40 приемов разрешений технических противоречий;
6. Мобилизация ресурсов (МР).
Х-элемент подставить на место каждого из элементов системы и проверить возможность выполнения функции (п.4). В качестве Х-элемента выберем призму. Деталь расположена на призме. Удлиним призму в 2 раза и поставим антипризму, рисунок 1.10.
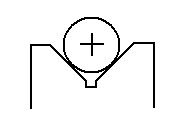
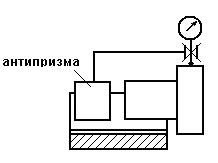
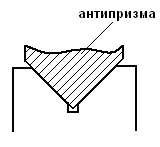
Рисунок 1.10 – Изображение конструкции антипризмы
Можно не удлинять призму, а сделать антипризму следующим образом, рисунок 1.11.
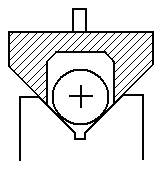
Рисунок 1.11– Изображение конструкции антипризмы
1.5.4 Разрешение технических противоречий
Идея может возникнуть на стадии ЭП (эскизный проект) и ТП (техническое предложение), т.к. на этих стадиях разрешаем технические противоречия. Технические противоречия – два взаимоисключающих требования к одному объекту.
Пример:
Требуется высокая точность часов, но изменение температуры влияет на длину маятника, следовательно, точность изменяется. Погрешность вызвана изменением температуры, рисунок 1.12.
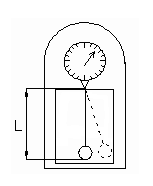
Рисунок 1.12 – Изображение часов с маятником
ЧАСЫ С МАЯТНИКОМ (ФЛЭШ)
Точность хода часов зависит от периода А, а период зависит от длины L.
∆L= (t1 - t2)·L·α
Уменьшить погрешность можно:
- ∆tпомещение≈0
- ∆tвнеш≈0 (холодильник, печка)
- ∆tвнутр≈0 (термоизоляция для корпуса)
- компенсатор
- автокомпенсация, сделать маятник из трех частей.
Разделим систему на две части, рисунок 1.13.
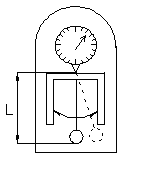
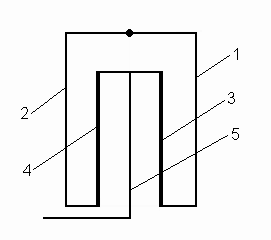
Рисунок 1.13 – Изображение решения уменьшения погрешности
ЧАСЫ С МАЯТНИКОМ (ФЛЭШ)
- 1 и 2 увеличивают L при нагревании,
- 3 и 4 уменьшают L,
- 5 увеличивает L.
Надо, чтобы суммарное расширение 1, 2, 5 было равносильно уменьшению 3, 4.
Пример: контроль полного радиального биения, рисунок 1.14.
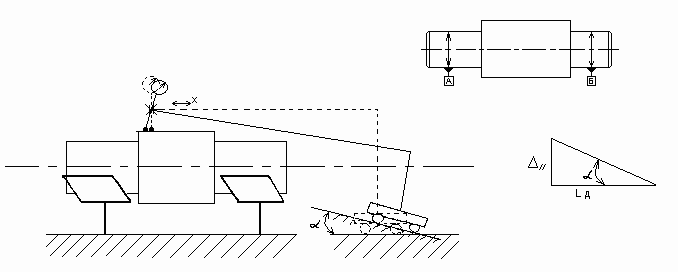
Рисунок 1.14 – Схема измерения радиального биения
КОНТРОЛЬ ПОЛНОГО РАДИАЛЬНОГО БИЕНИЯ
НАКЛОН НАПРАВЛЯЮЩЕЙ
НАКЛОН НАПРАВЛЯЮЩЕЙ (ФЛЭШ)
Высокая цена направляющих. Значительные погрешности из-за перекоса направляющих. Применим инструкцию АРИЗ, найдем ТП:
- направляющая должна быть выполнена с высокой точностью (что будет дороже).
- направляющая должна быть выполнена с низкой точностью (что будет дешевле).
Выбираем: низкая точность и низкая цена. Вводим Х-элемент (ещё не знаем его).
Сформулируем решение с Х-элементом. Он выполнит функции направляющей – перемещение индикатора по прямой линии параллельно базовой оси.
Мобилизация ресурсов (надсистемных, системных, внутрисистемных). Системные – возьмём призму в качестве Х-элемента. Изготовим мостик вместо кронштейна и закрепим в нем индикатор. Мостик опирается на 2 антипризмы, контактирующие с базовыми призмами, рисунок 1.15.
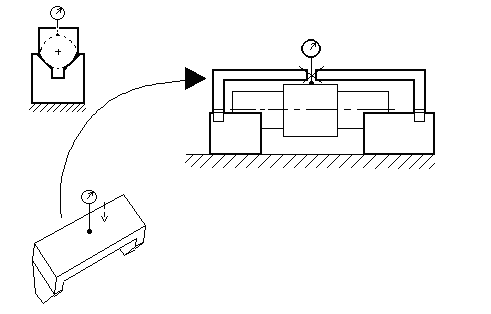
Рисунок 1.15 – Схема измерения радиального биения с двумя антиризмами
Получили новую конструкцию, исключили погрешность от перекоса направляющей вместе с самой направляющей. Конструкция получилась дешевле и точнее.