

3. Основи аналітичної геометрії
Аналітична геометрія вивчає прості геометричні об'єкти(прямі, площини, лінії і поверхні другого порядку) засобами алгебри на основі методу координат.
3.1. Метод координат
Положення точки А в просторі відносно деякої точки О (полюса) можна визначити за допомогою вектору ОА, кінець цього вектору вказує на розташування точки А в просторі відносно точки О.

Рис. 3.1. Радіус - вектор точки А
Через точку О в просторі проведемо три взаємно перпендикулярні осі, і на кожній з них візьмемо одиничний вектор, спрямований по цій осі (орт осі). Вісь з початком відліку в точці О і одиницею довжини називається координатної віссю, а впорядкована система трьох взаємно перпендикулярних координатних осей із загальним початком відліку О і загальною одиницею довжини, називається прямокутною декартовою системою координат в просторі. У вибраній впорядкованій системі координатних осей першу вісь будемо називати віссю абсцис (чи віссю х), другу - віссю ординат (чи віссю у), третю - віссю аплікат (чи віссю z).
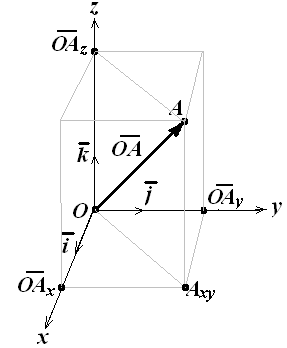
Рис. 3.2. Координатний метод завдання положення точки А в просторі.
Визначення 3.1. Координатами точки в заданій прямокутній Декартові системі координат називаються проекції радіусу-вектору цієї точки на координатні осі.
Координати точки А в заданій прямокутній декартовій системі координат (рис. 3.2) записуються у виді (x, y, z), де
x = OAx = Прх ОА , y = OAy = Прy ОА , z = OAz = Прz ОА, (3.1)
і називаються відповідно абсцисою, ординатою і аплікатою точки А.
Довжина вектора ОА визначається діагоналлю паралелограма із сторонами x, y, z, тобто
![]() .
(3.2)
.
(3.2)
3.2. Елементи векторної алгебри.
Геометричною моделлю векторної величини є прямолінійний відрізок з вибраним на нім напрямом.
Визначення 3.2. Вектор AB - спрямований відрізок прямої, у якого один кінець (точка А) називається початком вектору, а інший кінець (точка В) - кінцем вектора.
До векторів відноситься також і нульовий вектор, початок і кінець якого збігаються.
Використовуючи координатний метод всякий вектор в заданій впорядкованій декартовій системі координат представляється алгебраїчним об'єктом у вигляді впорядкованої трійки чисел (x, y, z), де x, y, z - координати радіус-вектора AB (точка А - початок координат), або координати кінця В вектора AB.
Визначення 3.3. Довжина (модулем) вектора називається відстань між початком і кінцем вектора.
![]() ,
,
де координати точок А(0,0,0) - початок координат, В(x, y, z) (див. рис. 3.2)
Визначення 3.4. Вектори називаються колінеарними, якщо вони розташовані на одній прямій або на паралельних прямих. Нульовий вектор колінеарен будь-якому вектору.
Визначення 3.5. Вектори називаються компланарними, якщо існує площина, якій вони паралельні.
Визначення 3.6. Вектори називаються рівними, якщо вони колінеарні, однаково спрямовані і мають однакові модулі.