

4.1. Основные показатели регулирования угловой скорости электроприводов
В современной промышленности используется большое количество производственных механизмов, работающих с различной, изменяющейся скоростью. К этой многочисленной группе относятся металлообрабатывающие станки, прокатные металлургические станы, подъемные краны и транспортные устройства, а также различные механизмы бумажной, угольной, текстильной и других отраслей промышленности. Так, в металлорежущих станках скорость электропривода должна регулироваться в зависимости от рода обрабатываемого металла, качества резца, размеров обрабатываемых изделий и других факторов. В прокатных станах для каждого профиля прокатываемого металла также имеются свои наиболее благоприятные скорости, определяющие производительность стана и качество продукции. Снижение скорости при прокатке ведет к уменьшению производительности и увеличению расхода энергии вследствие охлаждения металла, а чрезмерное увеличение скорости ухудшает качество продукции и даже приводит к появлению брака, так как при чрезмерных скоростях металл не успевает заполнить углы калибров прокатных валков.
В лифтах, подъемных и транспортных механизмах скорость необходимо снижать по мере подхода к пункту остановки, чтобы обеспечить плавное замедление и точную остановку в нужном месте. Скорость, при которой должен работать дымосос в котельной, определяется качеством топлива, его влажностью, зольностью, условиями процесса горения и требуемой производительностью котла. Во всех этих механизмах, как и во многих других, для достижения высокой производительности и требуемого качества работы необходимо осуществлять регулирование скорости.
Регулированием скорости называется принудительное изменение скорости электропривода в зависимости от требований технологического процесса. Понятие регулирования скорости не следует смешивать с естественным изменением скорости, возникающим в электроприводах в силу изменения нагрузки на валу работающей машины. Регулирование скорости осуществляется дополнительным воздействием на приводной двигатель; оно может быть произведено человеком или специальным автоматическим устройством.
В настоящее время все большее применение находит электрическое регулирование скорости, которое имеет ряд преимуществ в отношении технических и экономических показателей.
Основными показателями, характеризующими различные способы регулирования скорости электроприводов, являются: 1) диапазон регулирования; 2) плавность; 3) экономичность; 4) стабильность скорости; 5) направление регулирования скорости (уменьшение или увеличение ее относительно основной скорости); 6) допустимая нагрузка при различных скоростях.
1.
Диапазон
регулирования угловой скорости
определяется
отношением возможных установившихся
скоростей!
максимальной
![]() к
минимальной
к
минимальной
![]()
![]() :
:
при заданной точности регулирования (с заданным статическим падением скорости электропривода) для установленных пределов изменения момента нагрузки и других возмущений.
Обычно диапазон регулирования выражается в числах в виде отношения, например: 2:1, 4:1, 10 :1, 20: 1 и т. д. Современные системы автоматического регулирования электроприводов с обратными связями позволяют существенно расширить диапазон регулирования скорости.
Различные производственные машины требуют разных диапазонов регулирования. Например, главные механизмы металлорежущих станков в зависимости от их назначения работают с диапазонами регулирования D = (4 : 1) (100 : 1) и выше; для механизмов подач универсальных станков требуется диапазон до 10 000 : 1 и выше. При изготовлении бумаги для газет бумагоделательная машина работает с диапазоном регулирования D = 3 : 1, а при изготовлении высших сортов бумаги D — 20 : 1. Некоторые прокатные металлургические станы имеют диапазон регулирования D = (20 : 1) (25 : 1).
2.Плавность регулирования характеризует скачок скорости при переходе от данной скорости к ближайшей возможной. Плавность тем выше, чем меньше этот скачок. Число скоростей, получаемых в данном диапазоне, определяется плавностью регулирования. Ее можно оценить коэффициентом плавности регулирования, который находится как отношение двух соседних значений угловых скоростей при регулировании
![]()
где![]() -
и
-
и![]() —
угловые скорости соответственно на i-й
и (i-
1)-й ступенях регулирования.
—
угловые скорости соответственно на i-й
и (i-
1)-й ступенях регулирования.
При
плавном регулировании
![]() ,
а число скоростей z
,
а число скоростей z![]() .
В случае ступенчатого регулирования
коэффициент
плавности регулирования может существенно
отличаться
от единицы. Число скоростей, диапазон
регулирования D
и
коэффициент плавности регулирования
при таком регулировании связаны
между собой равенством
.
В случае ступенчатого регулирования
коэффициент
плавности регулирования может существенно
отличаться
от единицы. Число скоростей, диапазон
регулирования D
и
коэффициент плавности регулирования
при таком регулировании связаны
между собой равенством
![]() .
.
Плавность
регулирования во многих случаях
определяет качество
продукции. В практике электропривода
наименьшей
плавностью регулирования обладают
двухскоростные асинхронные
двигатели с короткозамкнутым ротором
(![]() =
2). Высокая плавность регулирования
угловой скорости достигается, например,
в двигателе постоянного тока независимого
возбуждения при регулировании изменением
потока
или подводимого к якорю двигателя
напряжения.
=
2). Высокая плавность регулирования
угловой скорости достигается, например,
в двигателе постоянного тока независимого
возбуждения при регулировании изменением
потока
или подводимого к якорю двигателя
напряжения.
3. Экономичность регулирования характеризуется затратами на сооружение и эксплуатацию электропривода.
Необходимо отметить, что экономически выгодным оказывается такой регулируемый электропривод, который обеспечивает большую производительность приводимого им в действие механизма при высоком качестве технологического процесса и сравнительно быстро окупается.
При
оценке экономичности регулируемого
электропривода следует принимать
во внимание надежность его в эксплуатации,
а также учитывать дефицитность материалов
и оборудования,
затрачиваемых на сооружение того или
иного привода.
Существенное значение имеют потери
энергии в
процессе регулирования. Потери мощности
![]() Р,
возникающие
при регулировании скорости, определяют
КПД привода:
Р,
возникающие
при регулировании скорости, определяют
КПД привода:
![]()
где Р2 — мощность на валу двигателя.
При работе двигателя на разных угловых скоростях следует подсчитывать так называемый средневзвешенный КПД за регулировочный цикл, состоящий из m ступеней, по выражению
![]() .
.
где Р2q и Рq — полезная мощность и потери на q-й ступени; tq — время, в течение которого двигатель работает на, q-й ступени.
Из этого соотношения следует, что при известных условиях работы электропривода КПД за цикл может оказаться значительно выше КПД на какой-либо одной ступени скорости. Если цикл не задан, то можно принять, что на всех ступенях двигатель работает одинаковое время с одинаковой нагрузкой.
Потери энергии при регулировании скорости различи! для разных способов регулирования. Они сравнительно велики в системах, где регулирование ведется в главных цепях машин, и значительно ниже при регулировании в цепях возбуждения. Последнее становится понятным, если вспомнить, что мощность цепи возбуждения, например, машин постоянного тока составляет лишь 1—5 % мощности главных цепей.
Важным экономическим показателем электропривода является коэффициент мощности и потребление реактивной энергии за рабочий цикл. В случае двигателя переменного тока сдвиг фаз между током и напряжением сети обусловливается потреблением реактивной мощности, затрачиваемой на создание магнитного потока.
Зная потребляемые двигателем активную Ра и реактивную Рр мощности, можно определить коэффициент мощности, с которым в данный момент работает двигатель:
![]() ,
,
и
средневзвешенный cos![]() р
при работе на разных угловых скоростях
с разным временем и с различными
нагрузками в течение цикла регулирования:
р
при работе на разных угловых скоростях
с разным временем и с различными
нагрузками в течение цикла регулирования:
•![]() .
.
Номинальный коэффициент мощности для большинства двигателей составляет cos ном = 0,8. 0,9 и зависит от мощности двигателя. С ростом мощности и номинальной угловой скорости двигателя повышается номинальный коэффициент мощности. Коэффициент мощности асинхронного двигателя в сильной степени зависит от нагрузки; при холостом ходе коэффициент мощности мал вследствие значительной реактивной мощности, затрачиваемой на создание потока, и малой активной мощности, связанной лишь с постоянными потерями. По мере роста нагрузки примерно до номинальной активная мощность растет быстрее реактивной и cos возрастает до номинального значения.
Коэффициент мощности синхронного двигателя также зависит от нагрузки, однако он может быть изменен при регулировании тока возбуждения. При меньшем токе возбуждения синхронный двигатель является потребителем реактивной мощности. С увеличением тока возбуждения возрастает cos . При дальнейшем увеличении тока возбуждения синхронный двигатель может работать в качестве генератора реактивной мощности.
Широкое использование управляемых полупроводниковых преобразователей для регулирования угловой скорости двигателей постоянного и переменного тока приводит к искажению формы первичного напряжения и тока и к значительному возрастанию потребляемой из сети реактивной мощности. Коэффициент мощности примерно равен:
![]()
где
![]() —
минимальная угловая скорость идеального
холостого
хода, соответствующая наибольшему углу
регулирования
—
минимальная угловая скорость идеального
холостого
хода, соответствующая наибольшему углу
регулирования
![]() ;
то же при
= 0.
;
то же при
= 0.
4. Стабильность угловой скорости характеризуется изменением угловой скорости при заданном отклонении момента нагрузки и зависит от жесткости механической характеристики; она тем выше, чем больше жесткость характеристики.
Рис.4.1 Иллюстрация изменения угловой
скорости для механических характеристик
различной жесткости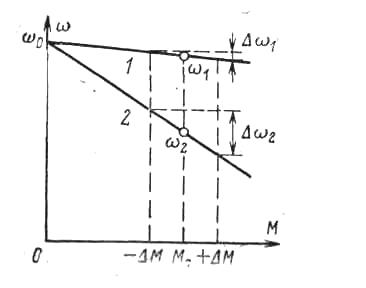
Если при регулировании угловой скорости жесткость характеристики изменяется, то и отклонение скорости от заданной тоже будет изменяться. На рис. 4.1 приведены две характеристики двигателя постоянного тока параллельного возбуждения при регулировании угловой скорости введением резисторов в цепь якоря.
Если
при этом момент сопротивления Мс
остается
неизменным,
то двигатель, работавший ранее с угловой
скоростью
,-
будет после введения дополнительного
резистора в цепь якоря работать с угловой
скоростью
2.
Однако при наличии
изменений нагрузочного момента в
некоторых пределах
(±
M)
угловая
скорость двигателя не остается постоянной,
она изменяется относительно средних
значений
или
2.
Отклонения угловой скорости
![]() ,
вызванные
изменениями нагрузки, будут тем больше,
чем меньше жесткость
характеристики. Это обстоятельство во
многих случаях
ограничивает диапазон регулирования
скорости.
,
вызванные
изменениями нагрузки, будут тем больше,
чем меньше жесткость
характеристики. Это обстоятельство во
многих случаях
ограничивает диапазон регулирования
скорости.
5. Направление регулирования скорости, т. е. уменьшение или увеличение ее по отношению к основной скорости, зависит от способов регулирования.
Основная угловая скорость, например, двигателя постоянного тока независимого возбуждения соответствует номинальным значениям напряжения и магнитного потока. Эта скорость получается в том случае, когда в цепях двигателя нет никаких внешних резисторов, т. е. точка осн находится на естественной механической характеристике.
Различают однозонное регулирование вниз от основной скорости, однозонное регулирование вверх от основной скорости и двухзонное регулирование, когда имеется возможность получать характеристики выше и ниже естественной.
При регулировании с помощью резисторов в цепи якоря двигателя постоянного тока или в цепи ротора асинхронного двигателя угловая скорость в двигательном режиме при данной нагрузке по мере увеличения сопротивления резисторов уменьшается. Это означает, что регулирование изменением сопротивления резисторов может быть осуществлено только вниз по отношению к основной скорости.
Напротив, регулирование уменьшением магнитного потока ведет в пределах нормальных нагрузок к увеличению угловой скорости, т. е. в этом случае осуществляется однозонное регулирование вверх от основной скорости.
6. Допустимая нагрузка двигателя, т. е. наибольшее значение момента, который двигатель способен развивать длительно при работе на регулировочных характеристиках, определяется нагревом двигателя и для разных способов регулирования будет различной.
Изменение нагрузочного момента в зависимости от скорости у различных производственных механизмов различно. Например, многие механизмы требуют регулирования при постоянном моменте. К ним относятся: подъемные краны, лебедки, некоторые прокатные станы и т. п. С другой стороны, существуют механизмы, у которых регулирование скорости производится с постоянной мощностью. В качестве примеров подобного механизма можно привести токарный станок, у которого в процессе обработки данной детали желательно поддержание постоянства линейной скорости (или скорости резания) и усилия резания. При этих условиях произведение скорости резания на усилие даст постоянство, мощности. Поддержание постоянства скорости резания достигается плавным регулированием угловой скорости электропривода.